To use this site, please enable javascript
To use this site, please enable javascript
In January, EIVA hosted a demo event in Brazil along with L3 ASV and NORBIT, showcasing the possibilities within unmanned/autonomous shallow water bathymetric surveys, particularly for the oil and gas sectors.
Highlighted technology applications included capabilities for onboard processing, remote operations, pipeline inspection with ASVs and the use of marine robotics for autonomous survey systems.
L3 ASV’s C-Cat 3 sailed Guanabara Bay in Rio de Janeiro equipped with a NORBIT multi-beam system and Applanix POS MV WaveMaster II blended georeferencing and motion compensation solution. The vehicle was controlled by ASView and all data was integrated into and visualised through NaviSuite Kuda – EIVA’s hydrographic survey acquisition and processing software bundle – using one onboard Windows 10 PC.
The highly efficient system setup – that is, the 2 pieces of equipment mounted in one small autonomous vessel with one single software integrating all sensors and a single software interface for mission planning through ASView– was received with particular interest due to its simplicity, compact size (around 3 metres in length), fast update rate and data quality; all in one unmanned remotely operated vehicle.
We are happy to say the demonstration event – EIVA’s first in Brazil – was received with interest, with attendees from across the oil & gas and survey industries.

C-Cat 3 ASV sailing Guanabara Bay, Rio de Janeiro, Brazil
For the outdoor demonstration, the C-Cat 3 carried out a multi-beam bathymetry survey. Two computers were set up – one running the vehicle and another running NaviPac – EIVA’s navigation and positioning software – with the survey itself, in addition to the ASView control station.
NaviPac bathymetric survey conducted by the C-Cat 3
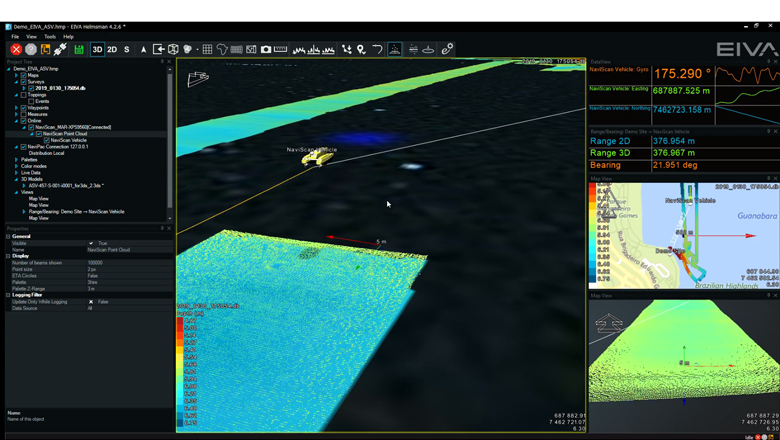
During the outdoor demo presentation, the C-Cat 3 vessel performed the survey in real time on the water whilst carrying out quality control (QC) on the multi-beam point cloud data. NaviScan profile view of the seafloor, point cloud map view as well as sensor data views were used to perform QC of the demo survey data, exemplifying customised setups for online survey inside NaviPac. Moreover, an online DTM was being built during the demo, showing the coverage area of the multi-beam data right after it has been surveyed.
Further NaviPac tools demonstrated were the various background maps, surface grid, 2D/3D views, show points of the surveyed DTM, new waypoint and runline creation, as well as distance measurement.
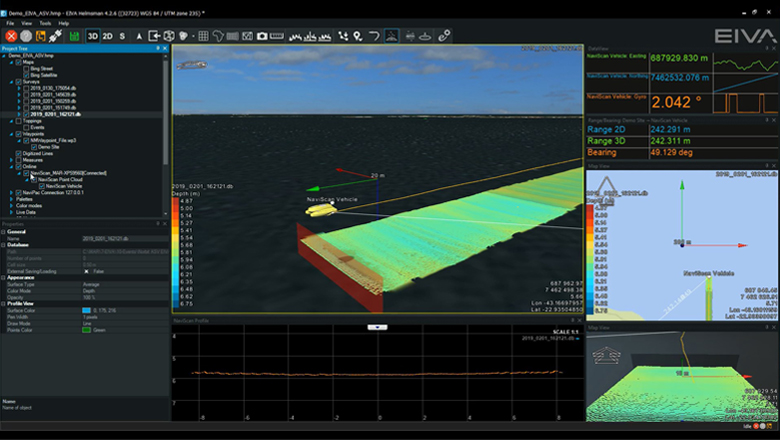
Real-time overview of the bathymetric survey demo in NaviPac
The day moreover included the presentation of NaviPac’s Coverage Assisted Runlines feature, which acts as a mission planning tool.
The ASV sails a marked area along the first edge, after which the software automatically generates the next optimal runline for the ASV to sail based on the actual coverage of the sonar data, with a defined overlap. This results in very little necessary planning time and optimisation of sailing time, as there is no need to maximise data coverage overlap due to curved runlines, also resulting in a shorter overall sail distance. The quality of the data is also ensured, as optimal runlines can be defined using knowledge about swathe, speed, terrain, sonar ping rates etc in order to cover the area with low risk gaps. The risk of having to carry out repeat surveys is also greatly reduced, as the specified overlaps deliver data with no gaps. L3 ASV and EIVA are looking to include this functionality in the C-Cat 3 through future collaborations.
NaviPac also provided near-real-time overview of the operation, facilitating onshore remote monitoring as well as control of the sonar. NaviPac can be configured to track several objects simultaneously in 3D in multiple views, thus multiple ASVs/AUVS can be operated at once. Through ASView, vessel routes can be manually controlled or pre-programmed, where manual control can override the autopilot function of the pre-programmed route, if necessary. As the remote Helmsman’s Display feature of NaviPac was used as a real-time display of position and sonar data, other data from the ASV was displayed on the ASView control screen.
Multiple view in NaviPac
The acquisition elements of NaviSuite Kuda – NaviPac and NaviScan – can run onboard the ASV on a small Windows 10 computer. Thus, data is logged onboard the ASV, which means that as little data needs to be moved as possible, as sonar data can be compressed onboard and then streamed back to shore for QC purposes and/or analyses of specific events of interest.
The new NaviPac 4 also contains useful cleaning tools, such as histogram plane cleaning and spike shooting, both available during online data acquisition. Visible outliers can be detected in the DTM and removed very easily using these tools.
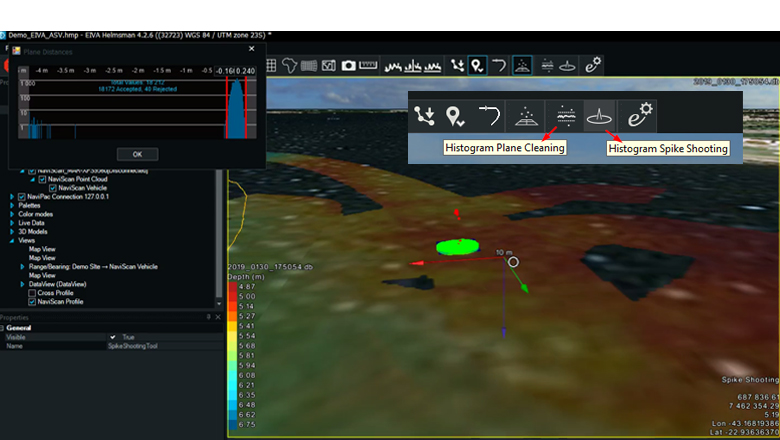
Histogram plane cleaning and spike shooting in NaviPac
The processing elements of NaviSuite Kuda also enable remote data processing on shore. The onshore processor can work in NaviModel and/or NaviEdit checking for any errors, conducting visual (QC) and provide any further manual input. Thus, onshore experts can assist the offshore surveyors by defining runlines, with CAD drawings and configurations of vessel setup, instrument offsets and geodesy.
Eventing tools are also available during online data acquisition inside NaviPac 4, allowing users to create and edit event tables during online survey.
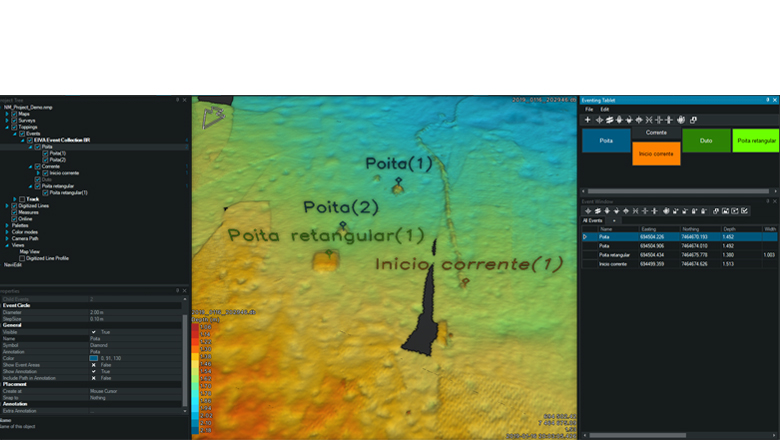
Eventing in NaviPac 4
NaviSuite’s configurable workflow process automation tool – Workflow Manager – can optionally run on the same computer, so that data is QC’d and cleaned in near-real-time.
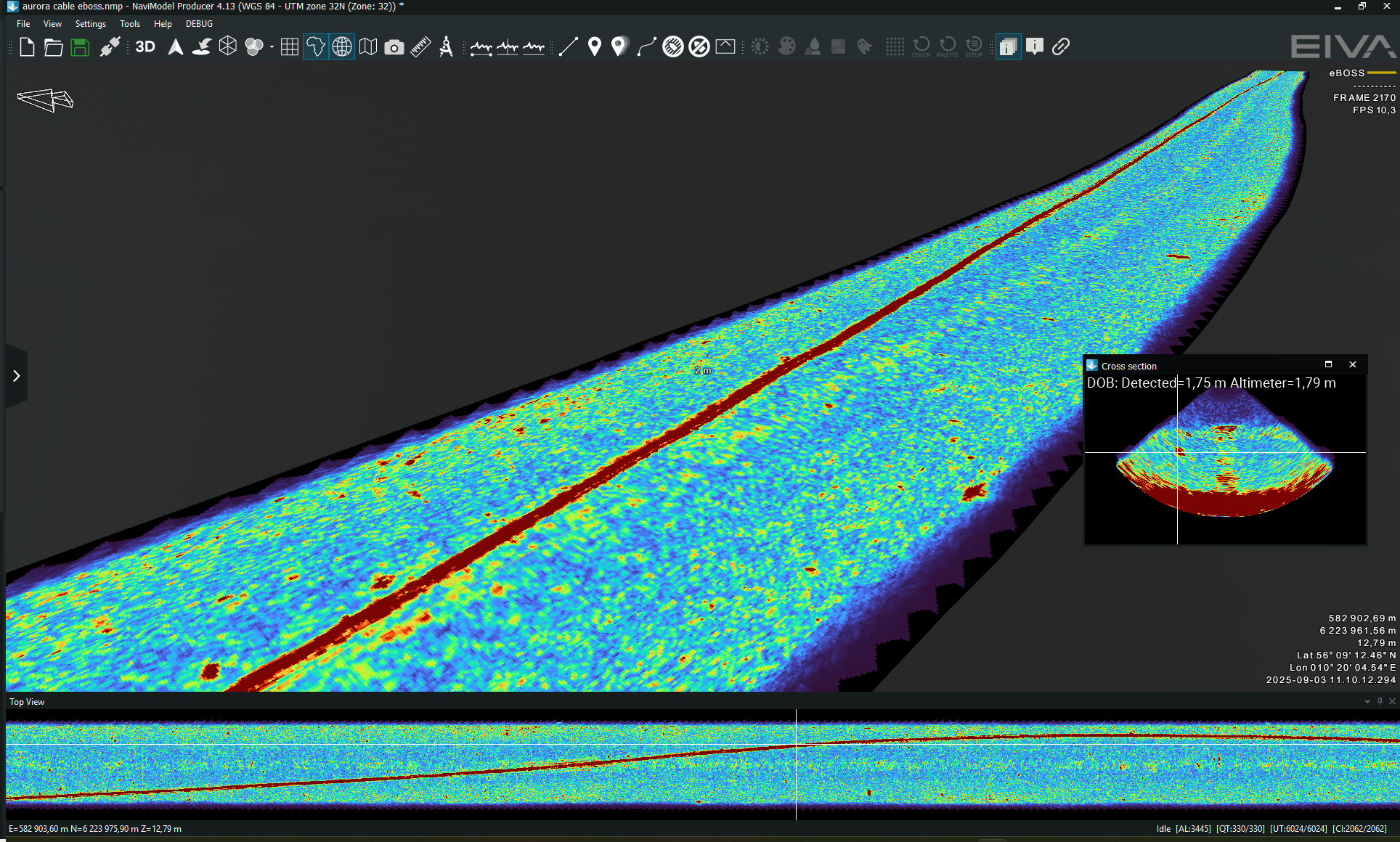
An application of this technology that is particularly relevant to the oil and gas industries is the ASV’s ability to perform autonomous pipeline surveys in near shore areas. Shallow waters are usually a challenge for conventional vessels and divers/ROVs, due to poor visibility in the surf zone areas, as well as the difficulties brought about by having to sail in such depths. With NaviSuite Kuda’s wide array of tools for data editing, 3D modelling and visualisation of the asset’s integrity, coupled with mission planning tools such as Coverage Assist Runlines and remote transmission options enabling real-time QC, the ASV operator can ensure optimum data quality whilst following the pipeline.
Reach out to us to learn more about the EIVA solutions detailed in this article.