To use this site, please enable javascript
To use this site, please enable javascript
In a technical demonstration of a powerful new system earlier this year, unmanned maritime systems provider L3 ASV showcased its multipurpose survey vessel C-Cat 3 executing an autonomous hydrographic multi-beam survey.

What was particularly exceptional about the vessel’s operation was that while the C-Cat 3 itself was located in Southampton harbour in England, survey planning and control of the vessel were directed by L3 ASV’s Brazil Team operators sat over 9,100 kilometres away at the Marintec South America exhibition in the SulAmérica Convention Center, Rio de Janeiro, Brazil.
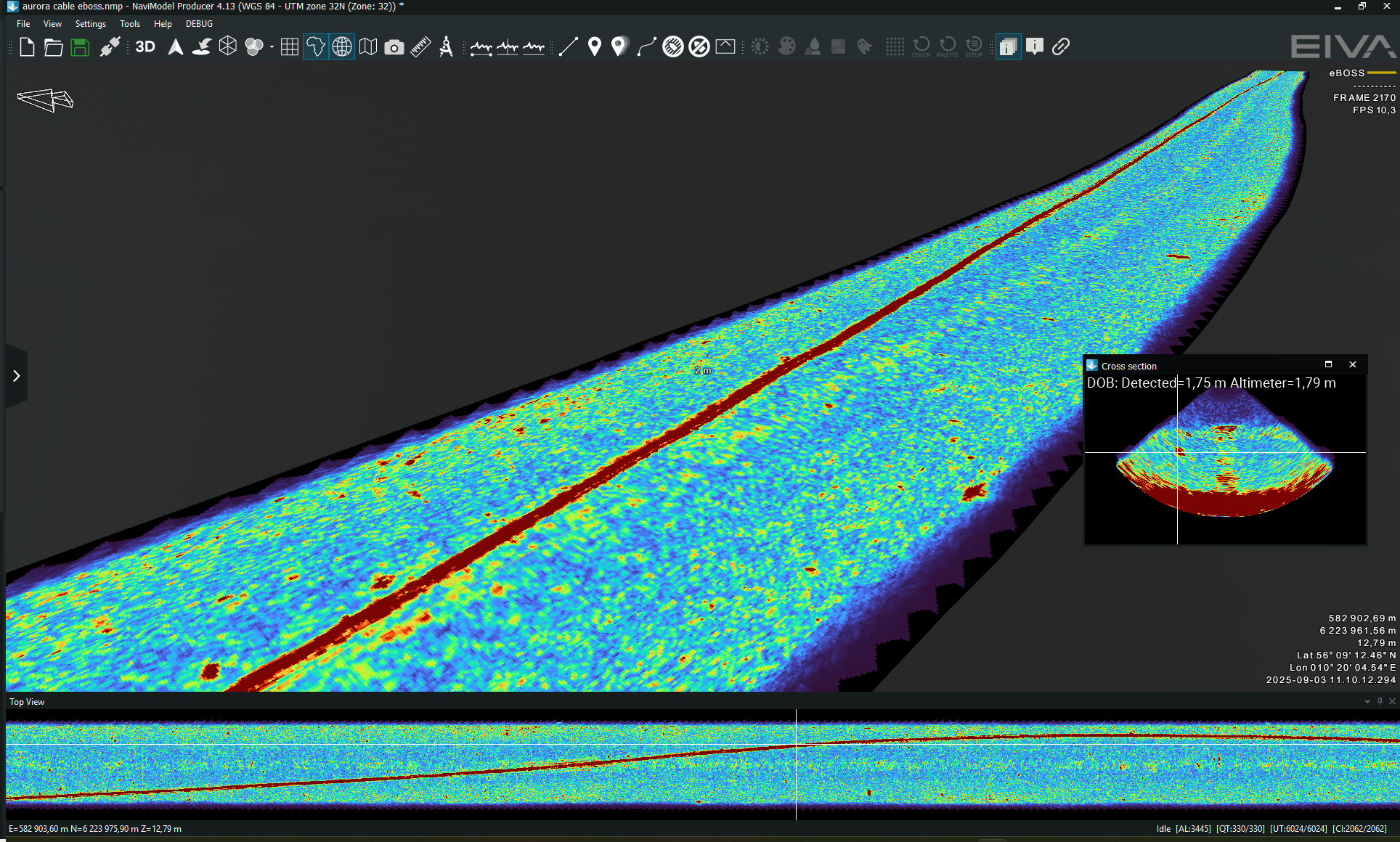
The demonstration resulted from L3 ASV working in conjunction with EIVA, NORBIT and KOREC Group, and featured a 1deg x 1deg beam-width multi-beam echo sounder (MBE) survey system logged and visualised in real time, with real-time RTK over the internet corrections services.
EIVA is proud to have been involved in the demonstration. Specifically, EIVA’s software package for sonar, sensor and laser data acquisition, NaviScan, was interfaced with the NORBIT iWBMSh LiDAR sensor fitted to the bottom of the C-Cat 3, while EIVA’s NaviPac Helmsman’s Display was used in remote survey planning, control and display.
James Cowles, L3 ASV Commercial Technical Sales Manager commented: ‘The Marintec demonstration showcased the flexibility of L3 ASV’s C-Cat 3 autonomous vessel to accommodate a variety of sensors and data acquisition methods, demonstrating its ability to effectively complete hydrographic surveys. Autonomy is the future of survey, providing opportunities for reduced costs, higher accuracy and less safety risks.’
Jeppe Nielsen, EIVA CEO, commented: ‘We congratulate the L3 ASV team for their impressive accomplishment. What was demonstrated reflects a great deal about the exciting direction in which we see autonomous maritime survey vessels and supporting systems taking as we move into the future.'
'At EIVA, we are excited to be heavily involved in developing software solutions that enable autonomous surveying and accelerate its adoption within the industry. Without doubt, these solutions open up opportunities that pave the way for more dynamic, cost- and time-saving survey operations.’

At Marintec South America L3 ASV controlled and monitored our C-Cat 3 autonomous vessel as it ran a survey 5,694 miles away in Southampton, UK.
In play during the demonstration alongside EIVA’s NaviPac Helmsman’s Display software was L3 ASV’s ASView; a control system developed and optimised specifically for use on autonomous surface vehicles (ASVs) such as the C-Cat 3.
‘Both ASView and the NaviPac Helmsman’s Display software allowed for a unique visualisation and situational awareness experience from across the Atlantic,’ said James Cowles.
He added: ‘The demonstration enhanced L3 ASV and EIVA’s experience in conducting remote surveys further highlighting the future of Over The Horizon operations. Mission plans developed in EIVA NaviSuite can be easily transmitted to ASView and utilised online, along with NaviPac Helmsman’s Display being able to display detailed 3D models of the C-Cat 3.’
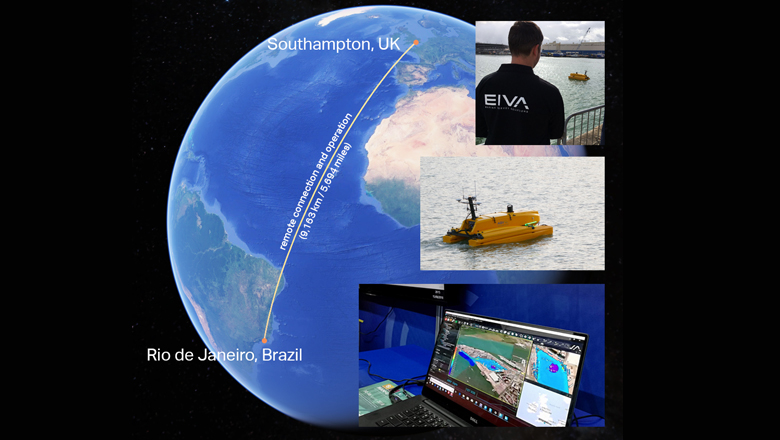
Command and control over a distance of 9,163 km enabled through innovation and collaboration, including EIVA NaviScan and Helmsman's Display.
C-Cat 3 vessel control and communications were established via radio and satellite systems and ASView. During the demonstration, L3 ASV’s portable base station hardware was mobilised on the National Oceanography Centre quayside in a pop-up control station. From here, an ASV operator controlled the system either directly, through remote control, or through ASView in a series of pre-defined mission plans.
In fully-autonomous mode, C-Cat 3 executed runlines and surveys which could be updated in real time.
For long distance control, the team in Brazil utilised a remote access system with full cursor and keyboard control to develop mission plans on the fly and execute them without the intervention of the UK team.
Through a single network cable output, EIVA NaviScan and NaviPac Helmsman’s Display collected MBE, navigation and altitude data and visualised point cloud data online. The acquisition laptop was located onboard the C-Cat 3 vessel, enabling the creation of an online digital terrain model (DTM).
James Cowles commented: ‘Integration through EIVA NaviScan was very intuitive and well-defined and it is clear to see the new Helmsman’s Display program is packed full of visualisation features and useful tools to aid online QC by the online surveyor.’
Motivated by the success of the demonstration, EIVA is enthusiastic to be continuing our collaboration with L3 ASV, and we look forward to future developments from ongoing work in which our aim is to strengthen the functionality of autonomous and remotely operated survey vessels.
Commenting on this ambition, EIVA Software Manager Ole Kristensen said: ‘Through our cooperation with L3 ASV, we seek a tighter integration between EIVA’s NaviPac and the ASV system; this will enable use of enhanced runline planning, the on-board coverage assist and autopilot integration to ensure survey route optimisation.’
The demonstration centred around a C-Cat 3 – a platform developed with a modular design to support multiple above and below water hydrographic survey instruments.
With a length of 3.02 m, beam of 1.55 m, and powered by two DC electric motors driving three-bladed propellers, C-Cat 3 is a multi-hull vessel capable of sustaining operational speeds of up to 8 knots. The vessel’s slight size, coupled with a low draft makes it ideally suited to deployment in shallow water or inshore environments. Battery-powered, the vessel can operate at 3 knots for between 6 to 8 hours.
Reach out to us to learn more about the EIVA solutions detailed in this article.