To use this site, please enable javascript
To use this site, please enable javascript
Author: EIVA CEO Jeppe Nielsen
We see many different approaches to hydrographic surveying from customers using the NaviSuite software products for data acquisition – from operations with a high degree of planning through for example predefined runlines, to operations where the vessel sets out without any prior runline planning, ensuring data coverage through manual steering.
Regardless of the level of planning a subsea survey specialist adheres to, a relevant factor to consider is data quality, that is, ensuring coverage and data density, while at the same time being able to minimise vessel time cost. EIVA is constantly working on improving the features of our NaviSuite software products to ensure our users even greater efficiency in their operations, based on these parameters.
For a long time, NaviSuite has encompassed a number of runline features, such as the possibility of:
In NaviPac 4.1, we wanted to take the runline features to a new level, based on automation.
Some surveys, especially smaller ones carried out in connection with for example harbour inspections or construction support, are often done without any pre-planning at all.
With NaviPac 4.1, we have made it possible to apply new automation features during these types of surveys – as well as more complex setups. The software can now use the actual coverage of acquired sonar data to continuously adjust the sail route by generating the next line to sail via an autopilot function. We call it Coverage Assisted Runlines.
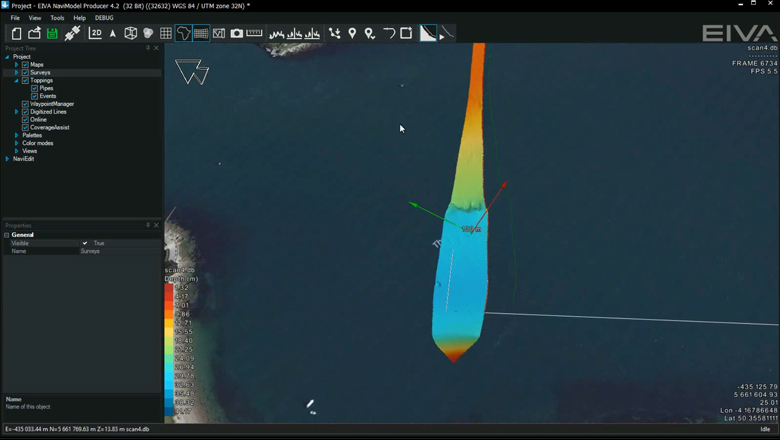
Automatically generated runline (green line) based on actual coverage of the sonar in NaviPac – the software will also generate a route for approaching this new runline, allowing you to run on autopilot throughout the survey
All you need to do is simply outline the entire area you would like to survey with a rectangle selection. The first side of the rectangle is used as the first line to sail, and the software will then do the rest of the runline creation work, ensuring you the desired coverage.
When you reach the perimeter of the selected area, a new runline is automatically generated, based on your settings. These include defining the desired overlap and how sharp the vessel turns should be.
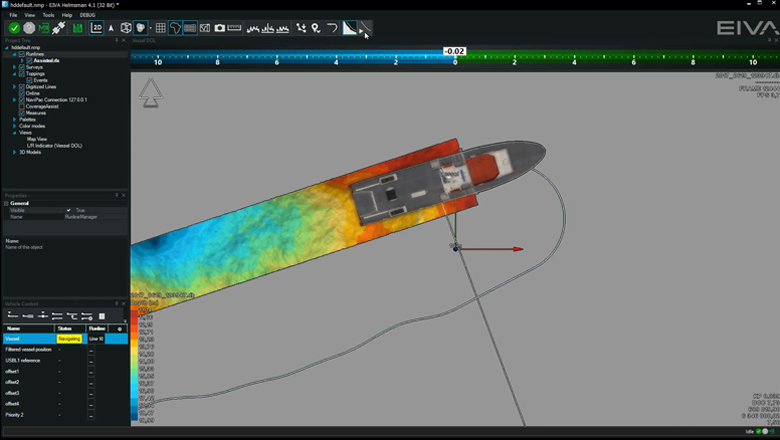
The approach line is generated based on your desired minimum turn radius
The Coverage Assisted Runlines feature brings a number of benefits:
The Coverage Assisted Runlines feature has been tested with selected customers before release and was made available in NaviPac Single User (available as part of NaviSuite Kuda) and NaviPac Pro 4.1, released in November 2017.
Consequently, it is included in all new licences and is available for all existing NaviPac customers who have signed up for our software maintenance and support programme (SMS).
If you would like to learn more about how it works, please feel free to reach out to our software experts.