To use this site, please enable javascript
To use this site, please enable javascript
ScanFish is an ROTV (Remotely Operated Towed Vehicle) which is both available to buy and rent for offshore surveying. It is used in several types of operations such as magnetometer surveys, oceanographic surveys and UXO (Unexploded Ordnance) detection.
Recently, we added another application to ScanFish by fitting it with underwater imaging and navigation technology from our sister company Sonardyne: a Solstice sidescan sonar, Mini-Ranger 2 USBL tracking system and SPRINT 500 INS (Inertial Navigation System) interfaced with a DVL (Doppler Velocity Log). All this equipment was mounted underneath the ScanFish 3D in a special pod.

The ScanFish 3D fitted with imaging and navigation equipment from Sonardyne
The EIVA development team were out on the AURORA, our local university’s research vessel, for testing the new function. They often go out fishing for product improvements and to test our rental equipment before it’s delivered to customers. On this venture, they were joined by colleagues from Sonardyne and Wavefront Systems, the R&D team behind the development of Solstice – and also part of the Sonardyne group of companies [edit: since publication of this news item, Sonardyne Group changed name to Covelya Group, which in July 2026 was acquired by Kraken Robotics]. The results from the collaboration are promising.
The development versions of the Solstice software together with EIVA’s NaviPac were used to test the new ScanFish functionalities. NaviPac is a software package designed to provide navigation and positioning features for surface and subsea vehicles. All the equipment was connected through EIVA’s 1Gbit/s fibre-optic tow cable, which supplied an abundance of bandwidth for the operation.

Working together to get the ScanFish mounted with Sonardyne-supplied equipment into the water
The challenge with testing any sonar around Aarhus harbour is that the seabed is flat, and lacks features. Except for a few boat wrecks, the teams were left to deploy their own artificial targets in the form of second-hand bikes.
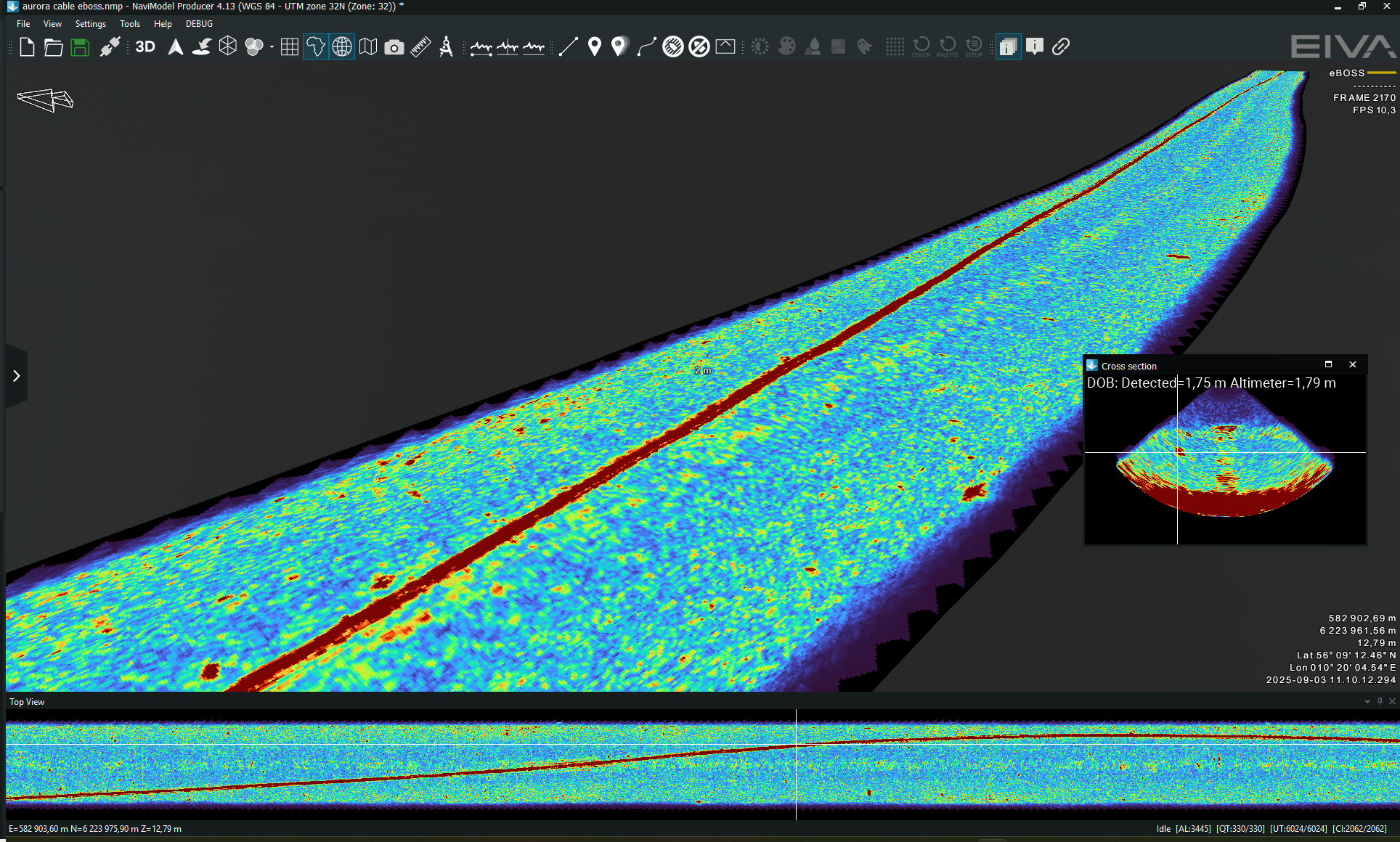
ScanFish performs swimmingly as a platform for advanced multi-aperture sonars such as the Solstice, which produced high quality data during the trial. The ScanFish has the ability to fly at a fixed height above the seabed, furthermore, it’s stability in the water makes it better suited to sonar operations that benefit from constant altitude compared to a passively towed system.
A passive towfish is affected by the speed of the towing vessel and the length of tow cable which determines depth. A sidescan sonar attached to a passive towfish is sensitive to roll, pitch and heave, and creates artefacts during the collection of data. The ScanFish is immune to this problem. Cable length and vessel movement is unimportant because the ScanFish can operate independent of cable length in a vertical envelope of 100-150 metres.
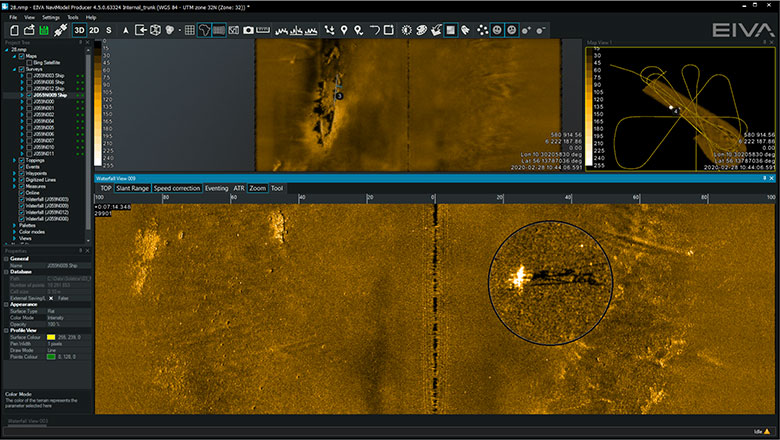
Sidescan sonar imagery presented in NaviModel Producer. The shadow of a bike mounted to a plate standing upright on the seabed is circled in the bottom right of the image.
The trial on the AURORA was the first time our teams worked together and we were left satisfied with the results. When combining the stability of the ScanFish with the high-quality data from the Solstice, and the processing and presentation power of NaviSuite, the results speak for themselves.
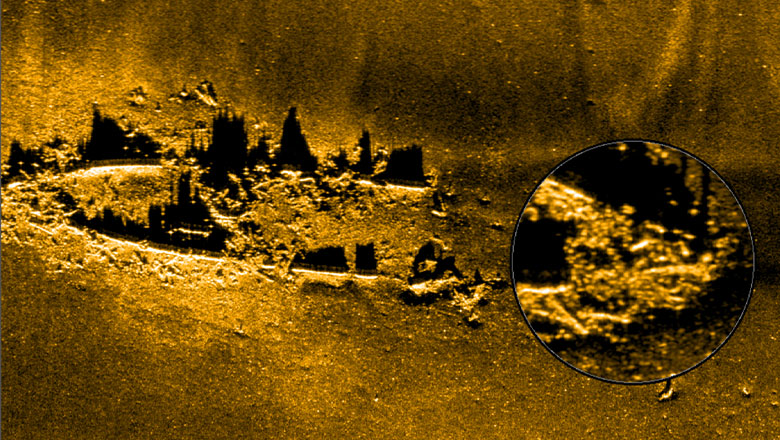
A shipwreck captured by the Solstice and displayed in NaviSuite
The navigation solution produced unmatched accuracy of positioning compared to the ScanFish’s previous positioning system. This heightened positioning accuracy is not only relevant for sidescan surveys, but also for magnetometer surveys. When a sonar is mounted to the ScanFish, verifying position can be achieved simply by matching the overlapping data and ensuring that it correlates. The trial shows an excellent matchup of data. Furthermore, it shows a general positioning accuracy significantly better than 0.5 metres measured during repeated runs over the same target. The results were so good that, in the near future, EIVA will offer a positioning pod with variants of the SPRINT 500 INS and DVL for high-end positioning of ROTVs.
The ScanFish uses a built-in altimeter to follow the seabed and avoid obstacles. This approach has the advantage of not needing the ScanFish’s location, because it will simply fly over detected obstacles; however, very large, steep obstacles risk being detected too late for evasion.

In the video you can see a ScanFish in terrain following mode cruising along the seabed
The development team tested a new vessel-aided follow terrain mode while they were out sailing. This approach uses the vessel’s sonar to map the seabed ahead of the ScanFish, and effectively warn it of approaching obstacles. It works by NaviPac software creating a virtual route by either using a preloaded DTM (Digital Terrain Model), or from a real-time DTM created from a multi-beam echosounder mounted on the vessel. NaviPac automatically generates a safe route for an ROTV by pointing out large, steep obstacles into which it would perhaps have previously collided.
The vessel-aided follow terrain mode allows the ScanFish to see further ahead and eliminates its short sightedness. Even though the ROTV can steer and follow the artificial route created in NaviPac, it can still be overruled by the altimeter in the case of any misleading information which would cause a collision with either seabed or an obstacle. During the trial, the ScanFish was able to avoid large obstacles and descend at a more controlled rate once clear compared to when using the altimeter alone. Not only does this lead to a safer operation, but the quality of collected data is of a higher degree.

Watch the new vessel aided terrain mode in action
The trial did come with challenges, one being the area around Aarhus harbour being relatively flat, and another being the desire not to crash a ScanFish into the seabed. To solve the first problem, the DTM was modified to create a deep hole that didn’t exist, which the altimeter overruled when discovering the illusion and the ScanFish continued safely along the seabed. The DTM was then modified to create a large boulder, to which the ScanFish responded by following the route created in NaviPac and climbed over the obstacle rather than simply colliding with it.
After seeing such good results, we aim for having these combinations of software and hardware available to rent and buy in the near future. If the outcome of the trials could benefit your operation, please get in touch.