









Key features and benefits

Cutting a long hydrographic survey story short: What you get
Diving further into the details of how the NaviSuite Kuda software will streamline your USV- and vessel-based hydrographic surveys.
Cutting a long hydrographic survey story short: What you get...
Diving further into the details of how the NaviSuite Kuda software will streamline your USV- and vessel-based hydrographic surveys:
Choose the bundle variant that matches your survey spread and your budget
… ranging from the NaviSuite Kuda Core entry-level variants for USV / single vessel setups to NaviSuite Kuda Pro for more complex and extensive hydrographic survey operationsEasy configuration
… through an intuitive user interface bringing all relevant features to your monitor, including a patch test toolAutomatic data cleaning
…. through a variety of cleaning methods, allowing for customisable configuration, also during acquisitionAutomatic data processing (only available in the + Processing variants)
…. by enabling you to set up an automatic workflow, letting the software do the hard work even for massive amounts of dataBring autonomy onboard your hydrographic operations
… through support of autopilot route planning and control, as well as real-time optimisation of survey area coverageLet your team join your hydrographic operations remotely
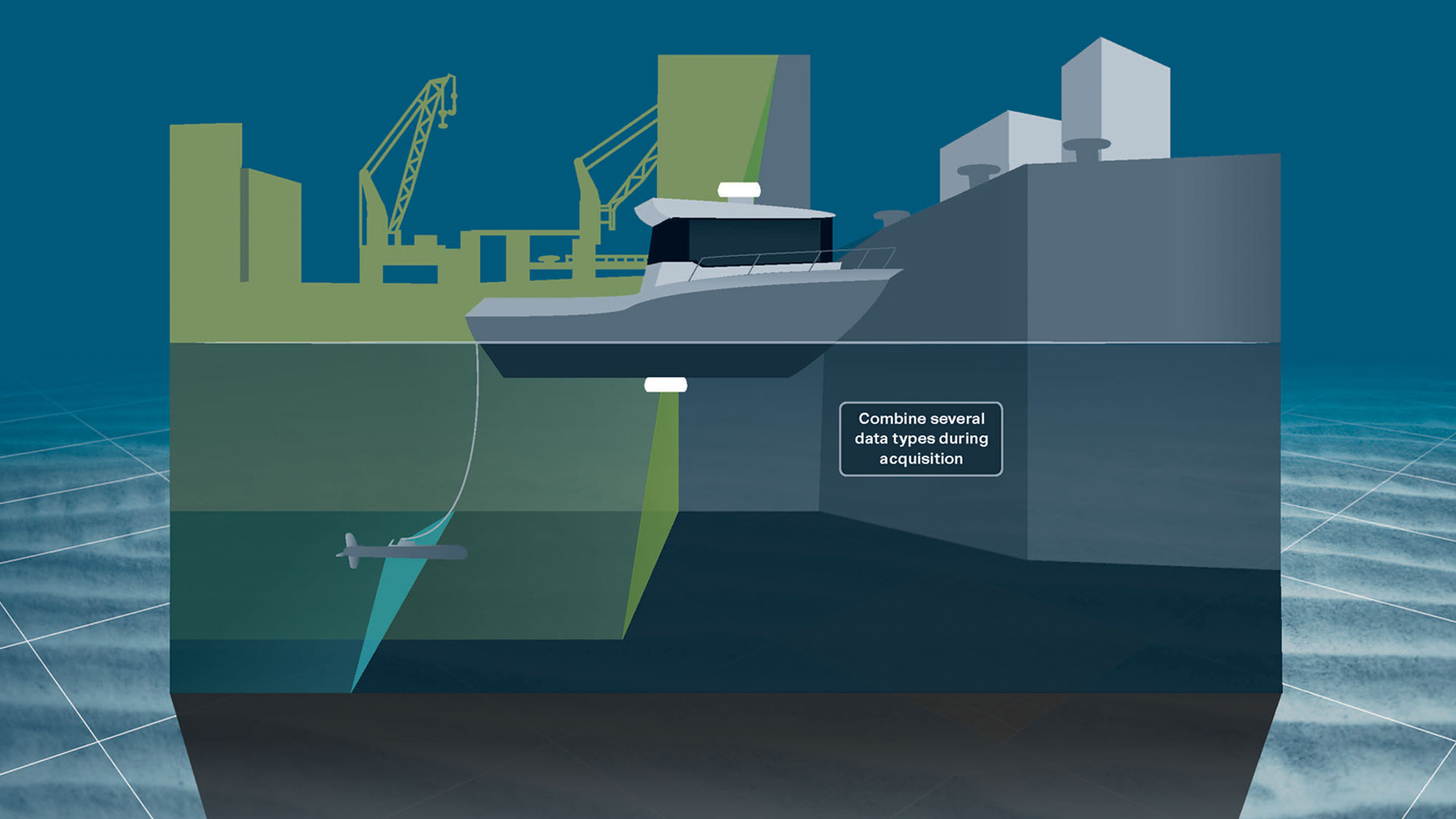
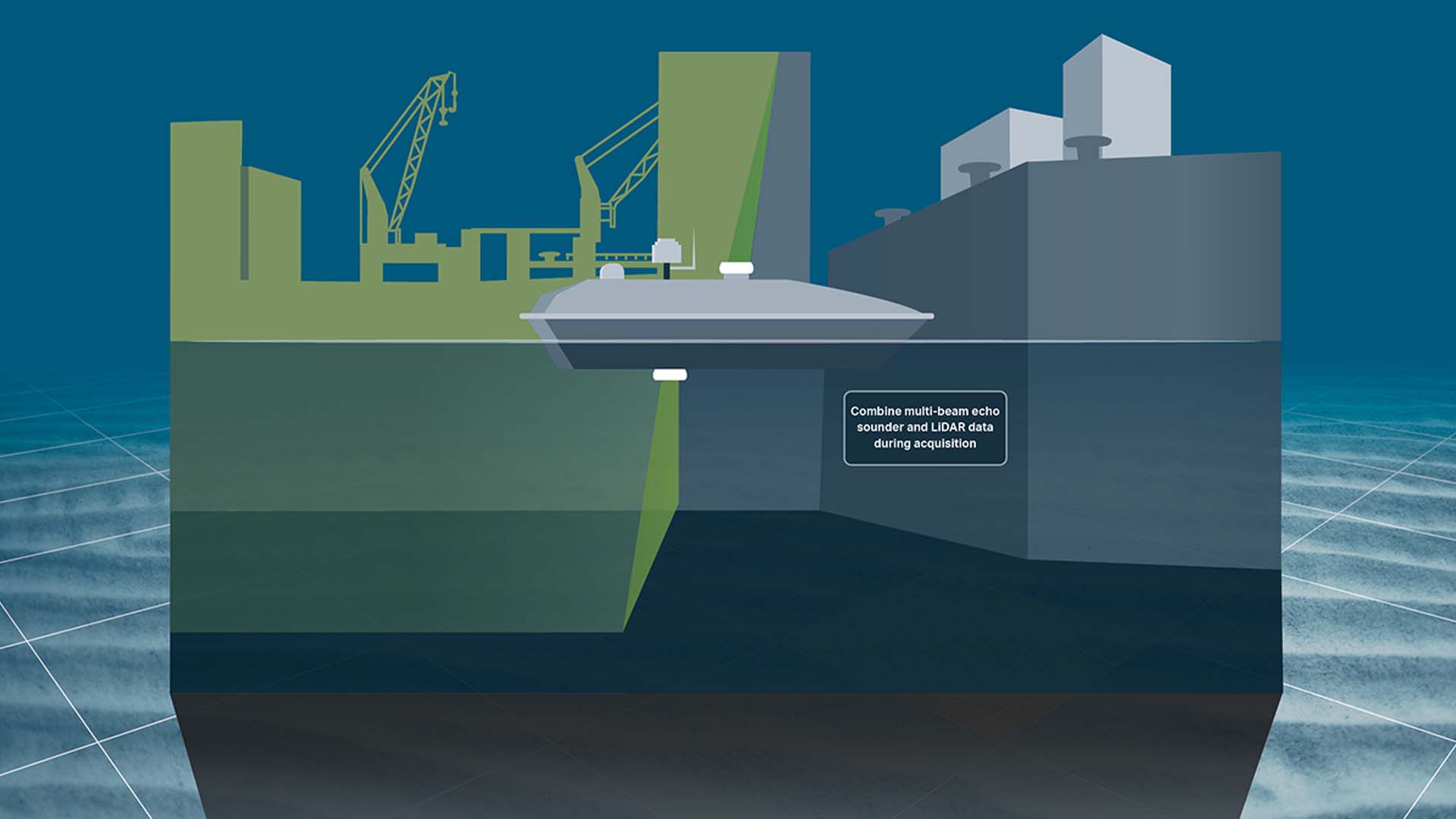
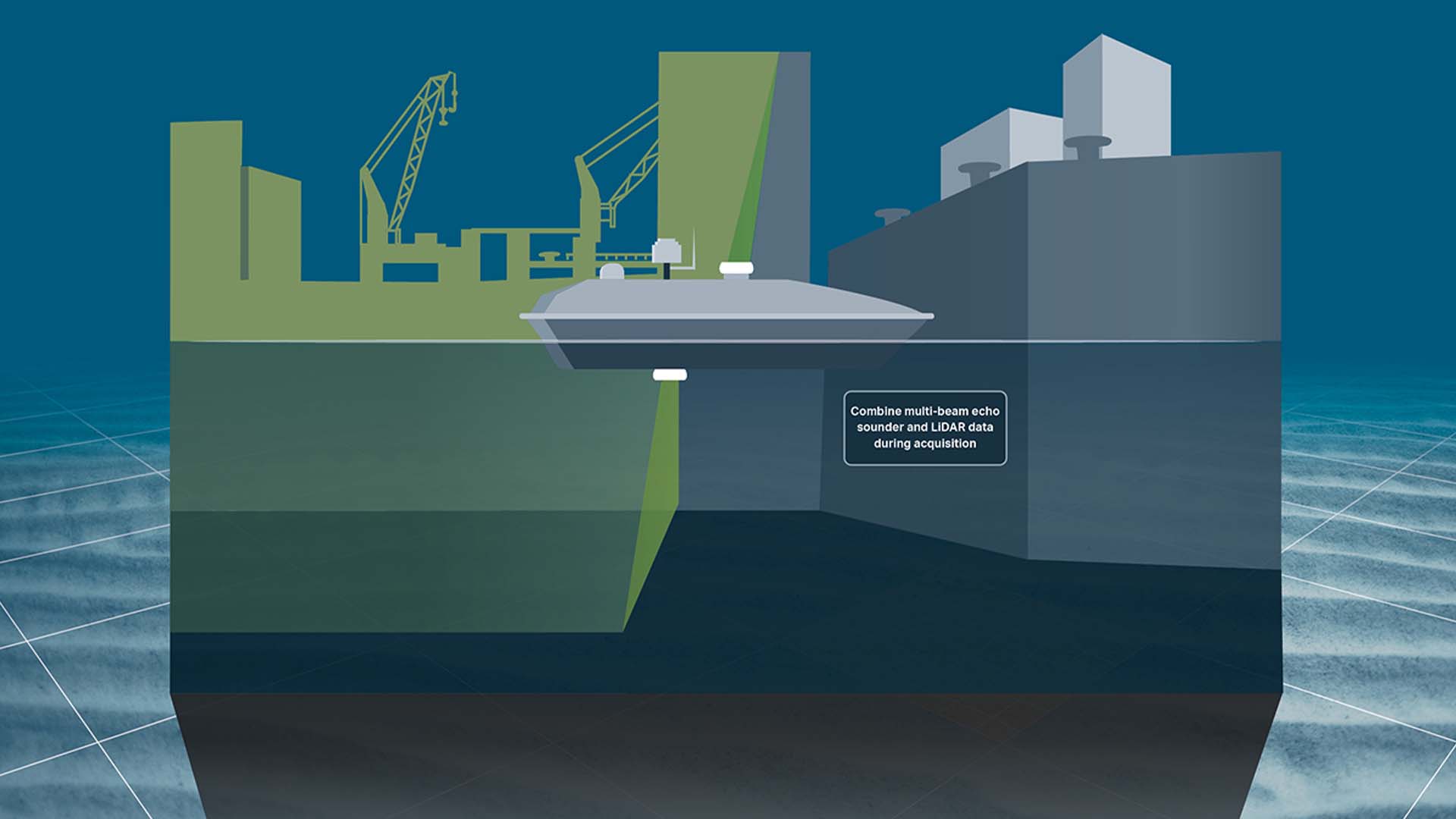
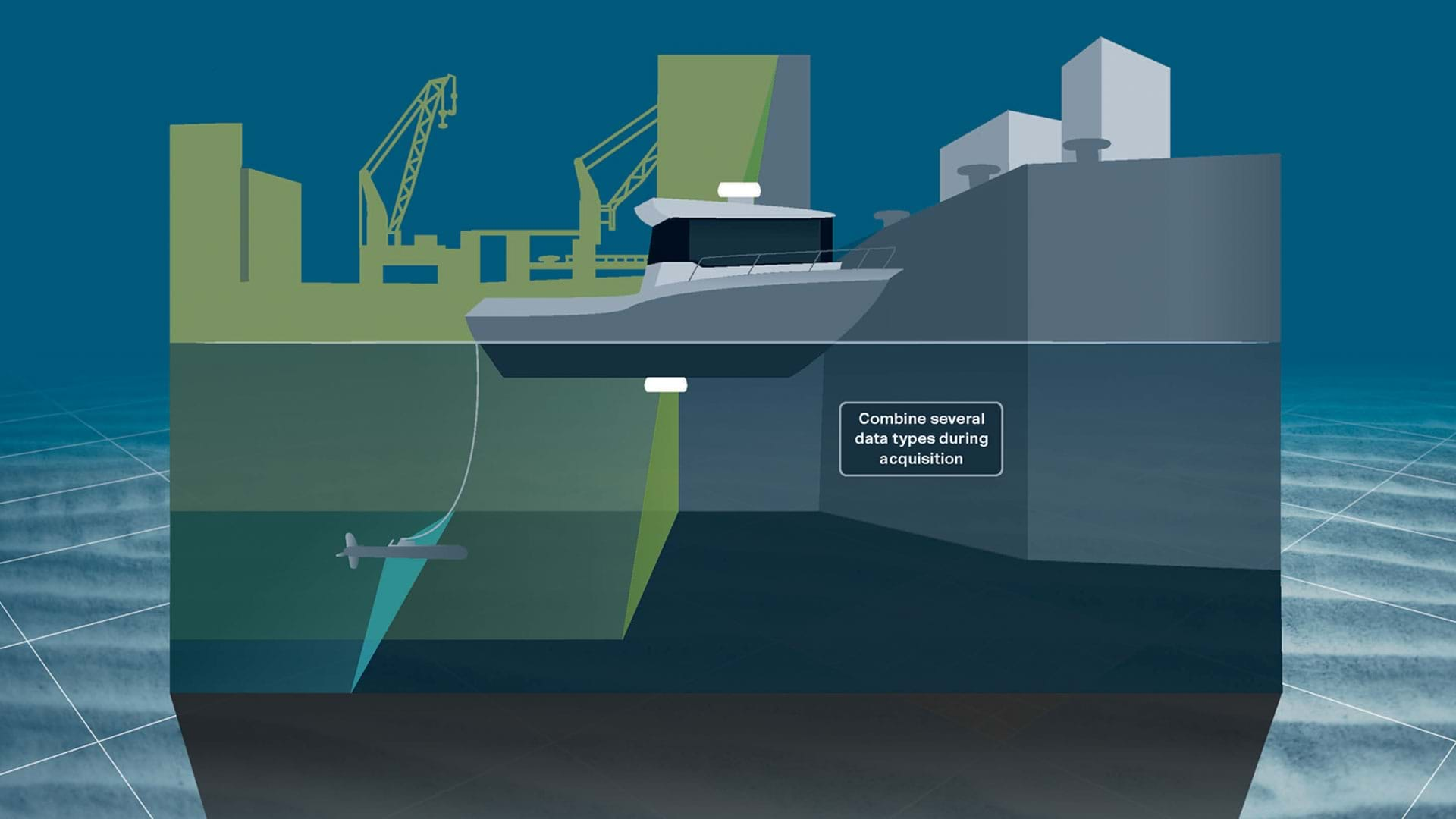
… through the possibility of remote supervision, control and data processingCombination of several hydrographic survey data types
… through interfacing to high-tech sonars, LiDARs and cameras, thereby reducing cost of survey and the risk of errorsHigh-performance bathymetric data acquisition and processing in real time
… as the size of data sets is only limited by disc capacity and it is possible to make terrain models on the fly, thereby allowing for better bathymetric survey data quality and fast reportingEasy registration of objects/observations of interest and survey logging
… though a dedicated tool available during both acquisition and processingIncreased precision of data
… through interfacing to standard vessel navigation equipment and the possibility to purchase the EIVA ATTU time-tagging unit as an optional extraTaking your hydrographic surveys to the next level
NaviSuite Kuda is the optimal solution for time-efficient, high-quality bathymetric surveys, such as harbour and waterway surveys, as well as construction inspections.
By bundling the NaviSuite features relevant to hydrographic survey operations into a dedicated single-user solution, you get an affordable toolbox without compromising on the quality of its contents or its capacity.
As NaviSuite Kuda is part of the NaviSuite family, you can easily upgrade your solution should your needs change in terms of licences or features. In other words, you can go from a single-user setup to a large network installation with multiple operators and remote displays without changing software, and even expand on the list of services offered to your end-clients – while keeping training costs to a minimum.
Set test sails during your next hydrographic survey operation – Get a free 30-day trial package
EIVA offers all bathymetric survey professionals who are new to the EIVA NaviSuite software world a 30-day free trial package on the NaviSuite Kuda software, no strings attached.
-
Covers all relevant instruments for hydrographic surveys
NaviSuite Kuda interfaces with a long list of high-tech sonar equipment, LiDARs and cameras.
Covers all relevant instruments for hydrographic surveys
NaviSuite Kuda interfaces with a long list of high-tech sonar equipment, LiDARs and cameras
Moreover, the EIVA crew encompasses experienced engineers specialising in software and sensor technology. This means that you get a software solution developed by a highly qualified team of experts who know how to ensure that you benefit the most from the technologies included in your hydrographic survey spread.
Eliminate the need for manufacturer-developed software
In addition to cameras and LiDARs, the list of sonar types which NaviSuite Kuda interfaces with includes multi-beam echo sounders (supported by all NaviSuite Kuda variants), sidescan sonars, sub-bottom profiler and magnetometers. More simple solutions such as single beam echo sounders are also covered by the more than 500 drivers included in the bundle (supported by the NaviSuite Kuda Pro variants).
The software allows for support of multiple sensor heads at the same time (limited to dual head in the NaviSuite Kuda Core variants) during your hydrographic survey operations and tracking of a towed or remotely operated vehicle via USBL (available in the NaviSuite Kuda Pro variants).
NaviSuite Kuda allsow for AIS connections and interfaces to standard navigation equipment (GPS, MRU, INS, etc), allows for S-57 generation (optional extra) and supports SevenCs charts, raster maps such as GeoTIFF files from, for example, satellite images, 2D/3D CAD and GIS objects. In addition, you can export your results to GISs and videos in NaviSuite Kuda + Processing variants, as well as load saved projects into the free NaviModel Viewer.
Consequently, the need for manufacturer-developed software is eliminated, and you only have to invest in a single software solution for your hydrographic surveys. Moreover, as you are not working with several different solutions and data formats, the risk of errors is vastly reduced.
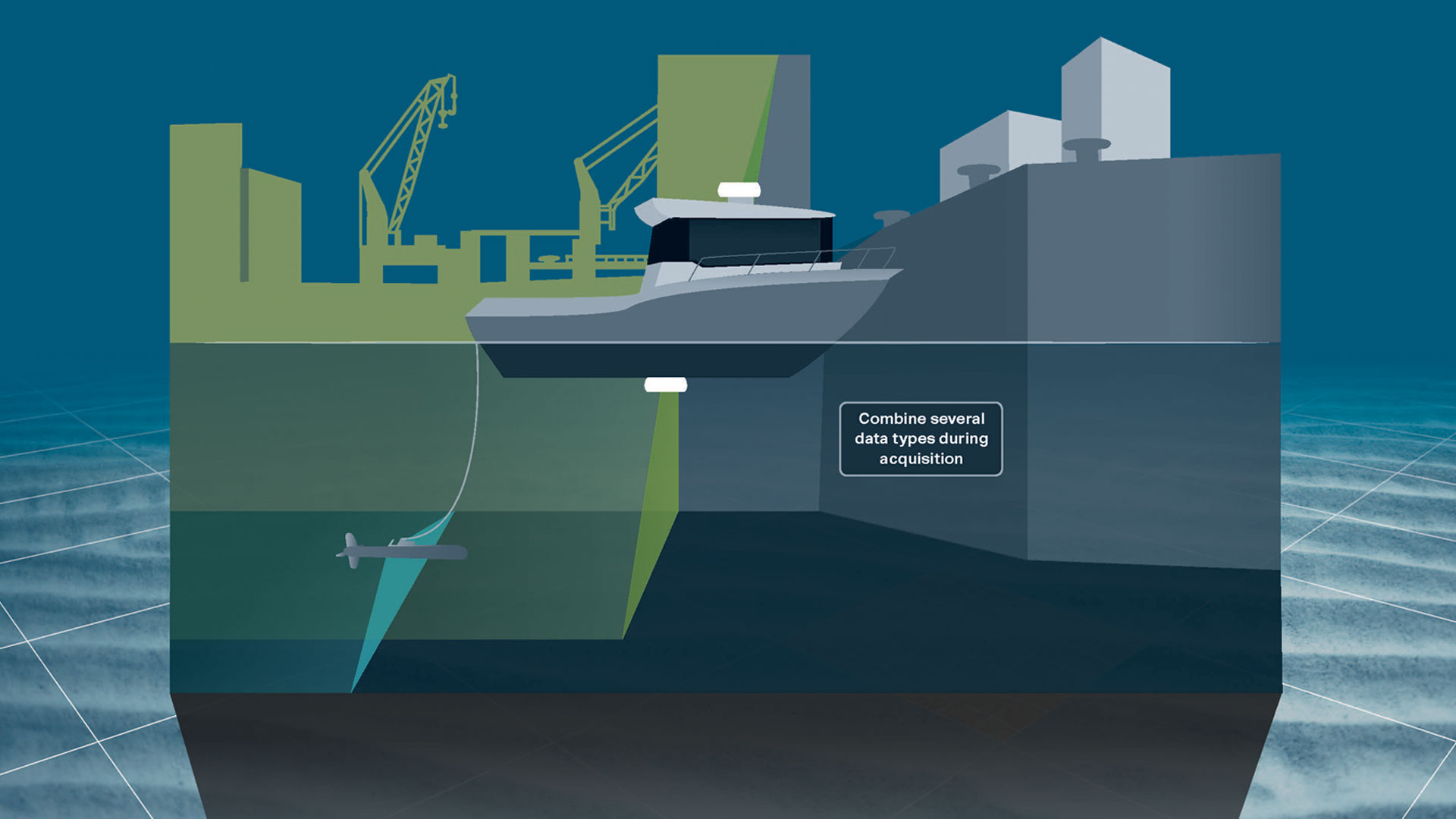
… Then apply the raw data throughout the workflow of your hydrographic surveys
In NaviSuite Kuda, the acquired data can be applied as raw data and combined throughout your acquisition and processing workflow. This means that you save time and are able to create a single end report with all relevant hydrographic/bathymetric data included.
Optional extra unit: Increase precision of data
As NaviSuite Kuda supports standard vessel navigation equipment such as GPSs, motion reference units (MRUs) and INSs, you are ensured a high precision of your data – a very high precision, if desired, by adding the certified EIVA ATTU time-tagging unit as an optional extra to your NaviSuite Kuda setup. The EIVA ATTU offers a time-tagging accuracy better than 50 µSec, which is far superior to what can be obtained through the use of the standard clock of an ordinary computer.
-
Optional extra services and special offers
EIVA offers a number of services for our NaviSuite software users.
Optional extra services and special offers
Get the most out of your software
EIVA offers a number of services for our NaviSuite software users. These include:
- Access to our self-service licence administration and purchase portal, My EIVA
- eLearning, virtual and classroom training
- Software maintenance and 24/7 support programme (Comes free of charge for subscription licences – Learn about the different licence types and the maintenance and support programme)
- Custom development
- Mobilisation/installation – on-site or remote assistance
- Dongle replacement programme for lost or broken dongles for permanent licences
Also, we have a number of special offers:
-
References
NaviSuite Kuda is used by hydrographic specialists throughout the world.
NaviSuite Kuda references
Njord Survey
'Njord Survey will use NaviSuite for all our projects during 2016 and onward. The strategy to use NaviSuite for shallow hydrographic surveys has created a smooth processing workflow and increased competence for our personnel by using only one standardised software flow. The clients will benefit from higher quality and more cost-effective operations in the coming projects.'
Anders Wikmar, Survey Manager, Njord Survey (formerly Clinton)
Civil Tech Oy Ab
'Thanks to its automation tools and user-friendly, streamlined interface, NaviSuite Kuda Core is a great software solution for remote surveys. I have found that the Coverage Assist real-time runline creation tool steers the USV more accurately than a human would be able to, helping the surveyor to ensure efficient area coverage and high-quality data – overcoming challenges of shallow water conditions.’
Kasper Engblom, Technical expert, Civil Tech Oy Ab
TideWise
‘One of the things we really like about NaviSuite Kuda Core is the ability to easily make real-time 3D data displays – which enhance the perspective of operators of our USV. NaviSuite’s online interface allows surveyors to immediately view the results – and from any angle.
Another thing is that I found the setup configuration user-friendly and easy to adjust as required. It’s very intuitive.’
Douglas Nemes, TideWise
Styvehavn AS
'NaviSuite Kuda is really an important component for us to be able to deliver these inspection services. Particularly NaviModel, which is a modern, fantastic tool to work with. It can display many kinds of data in 3D and allows us to prepare and deliver state of the art survey data to our clients.Thank you EIVA for developing fantastic, powerful software tools. Given the fantastic technology we possess, from a high-end multi-beam echo sounder system to complex and powerful EIVA software, there is so much we can do, so much we can improve to end up with even greater products for our clients.'
General Manager Henrik Halvorsen, Styvehavn
SensorSurvey
'Having flexible survey software is essential for a small survey company like SensorSurvey. For us, it’s important to be able to interface whatever survey equipment – be it multi-beam, LiDAR, side-scan or seismic – simultaneously, and to be able to take this data and produce professional documentation to our clients’ satisfaction. NaviSuite Kuda allows us to do just that.'
Flemming A. Christensen, Owner and General Manager
1 operator plus 4 hours of mobilisation and surveying equal extensive and detailed survey results in NaviSuite Kuda
In August 2016, EIVA participated at a Renishaw demo day which included preparing and conducting a LiDAR/MBE harbour survey with NaviSuite Kuda. The demo proved the capabilities and cost-effectiveness of the solution as illustrated in this video. Get all the details
-
General visualisation tools
Perform advanced data interpretation with powerful and easy-to-use tools for visualising models in 2D, 3D, side view or by time.
General visualisation features
Take a peek at NaviSuite’s powerful visualisation features – data can be visualised in 2D, 3D, side view or by time.
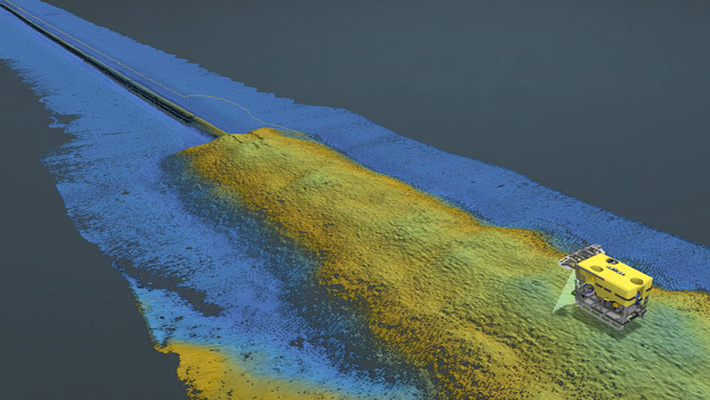
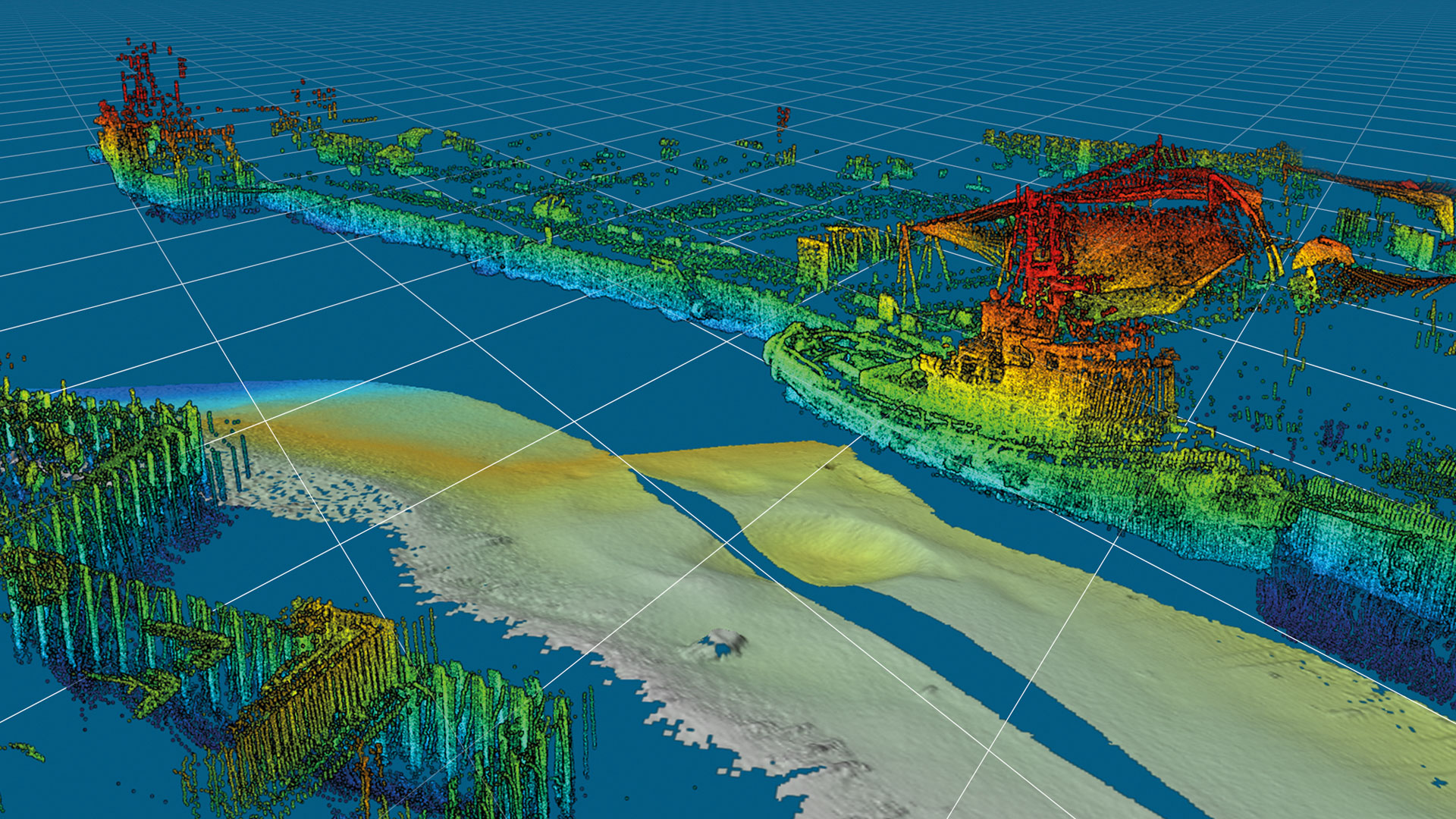
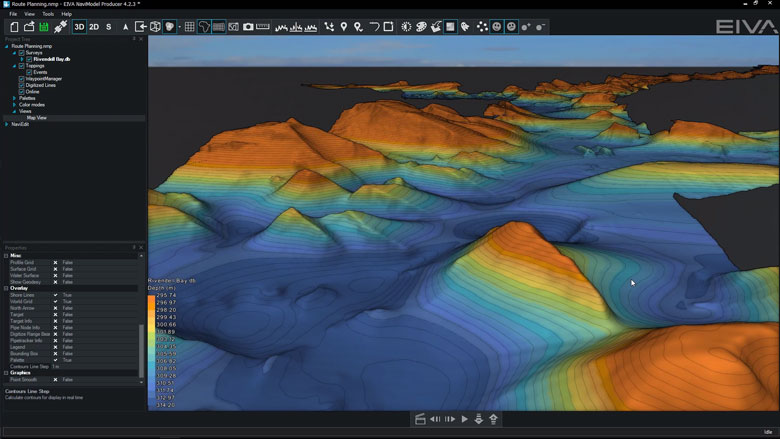
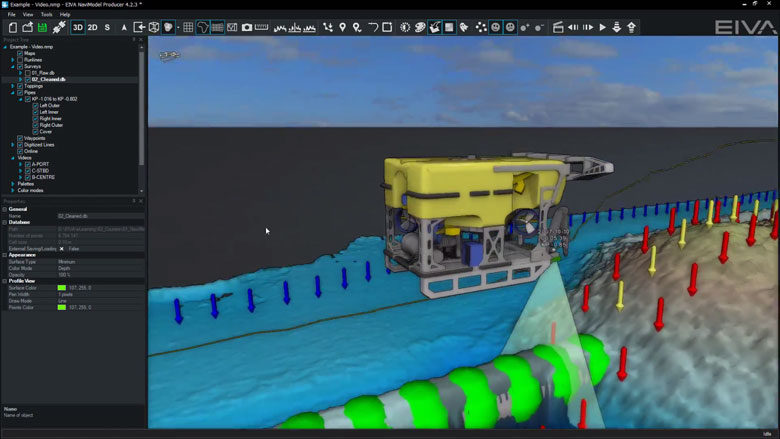
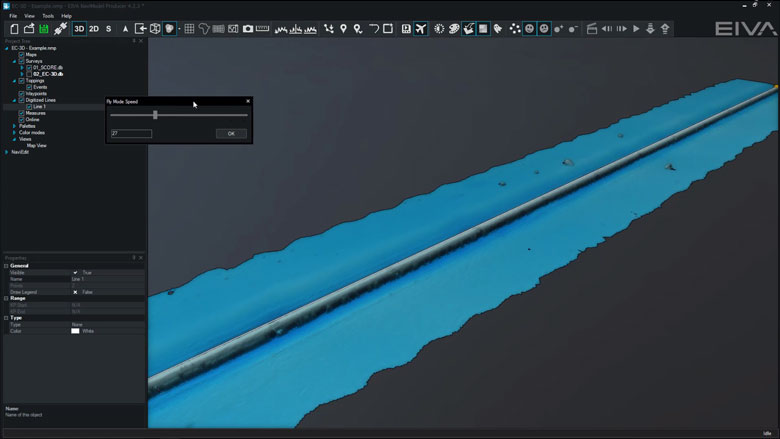
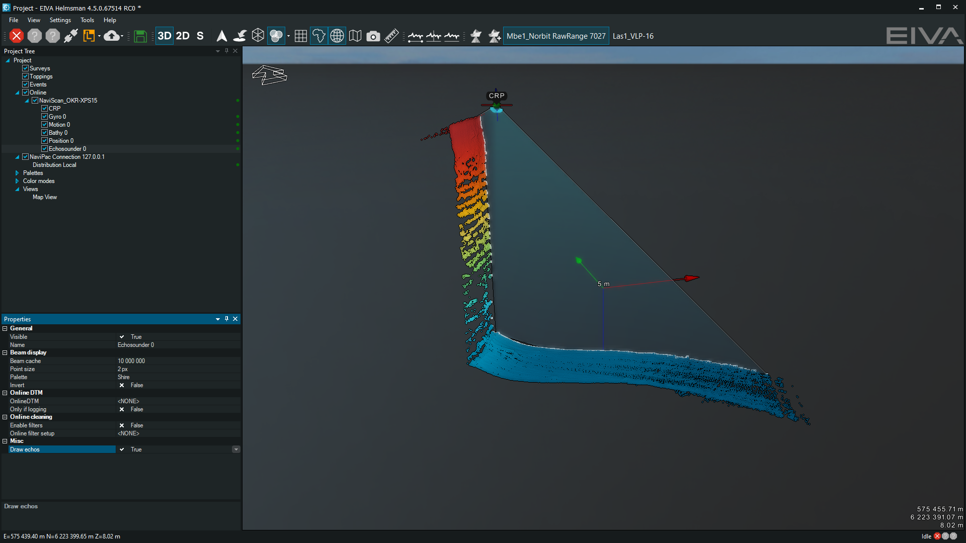
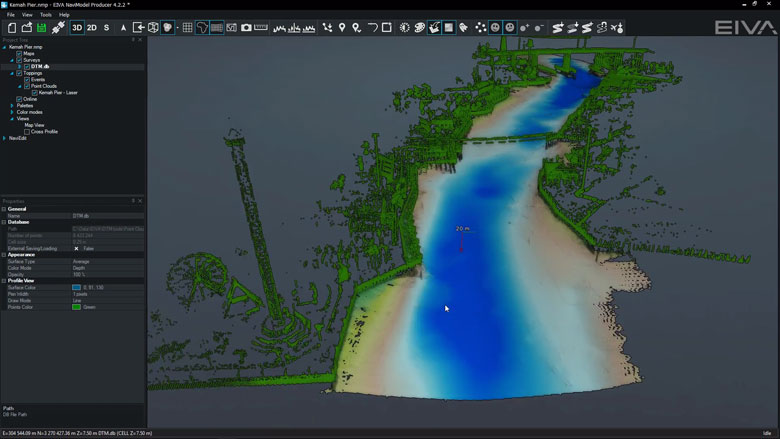
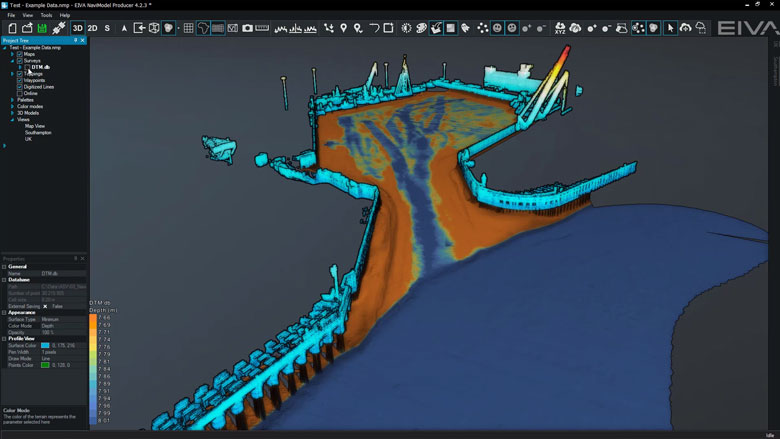
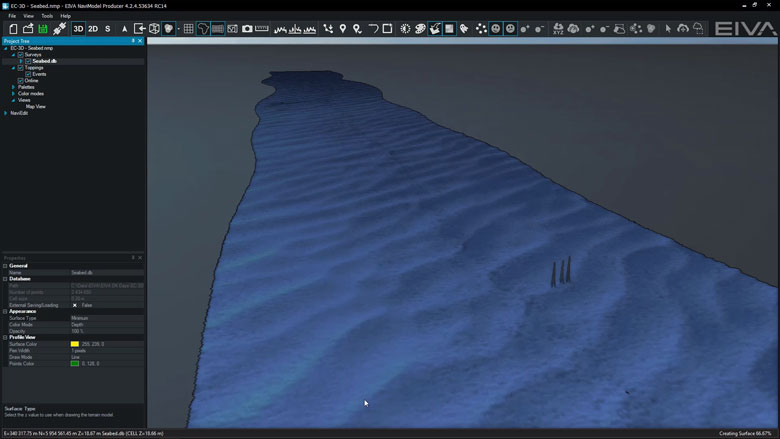
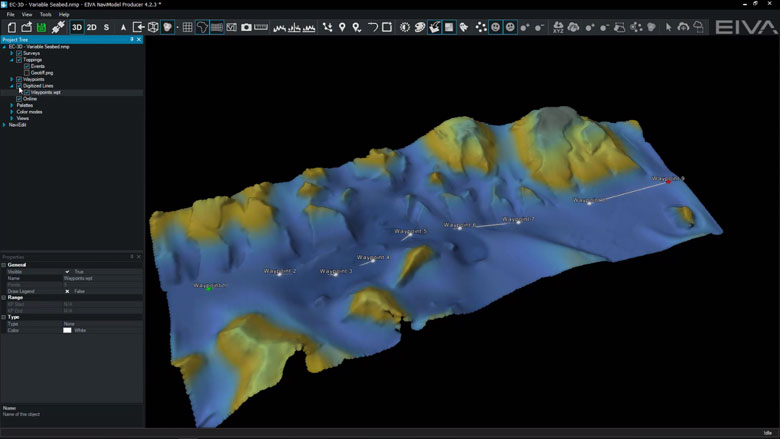
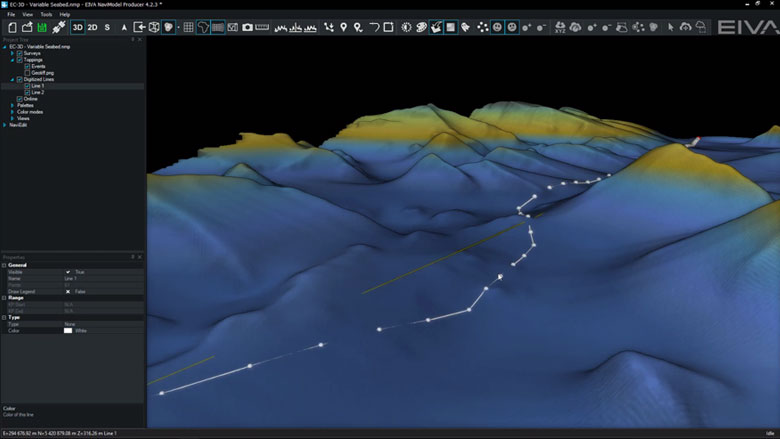
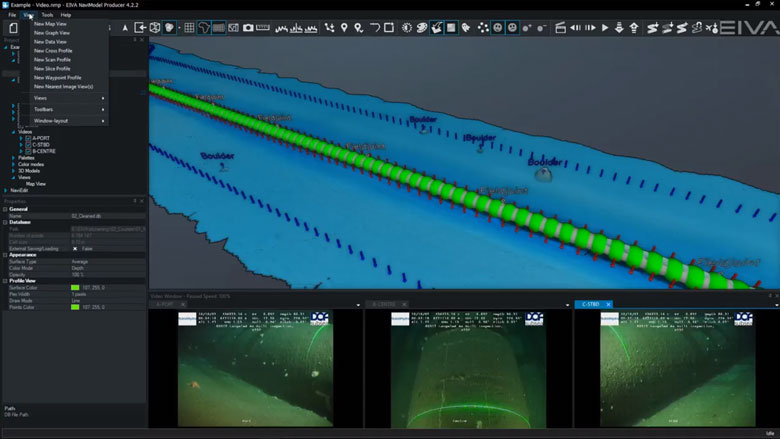
3D seabed terrain
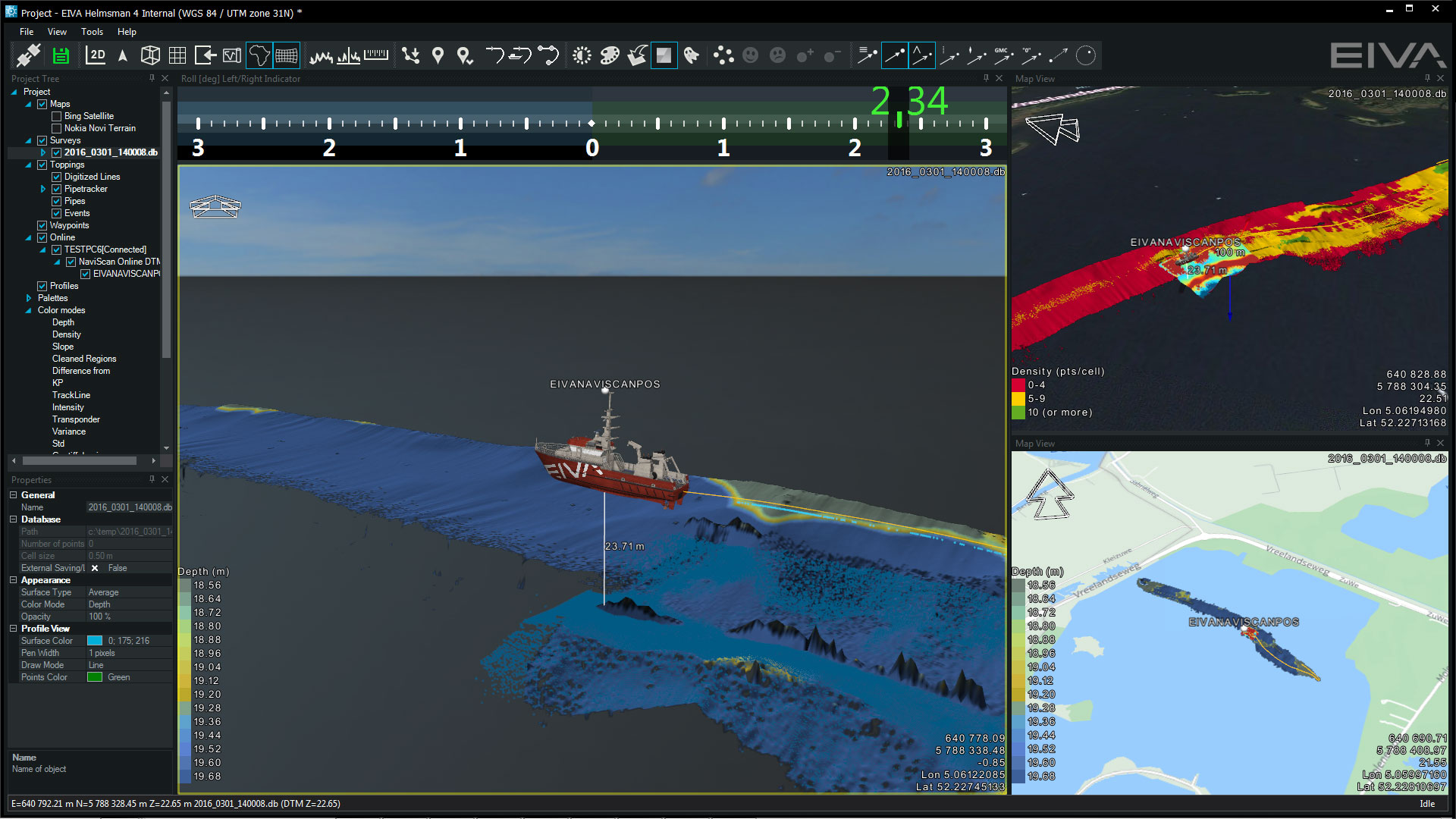
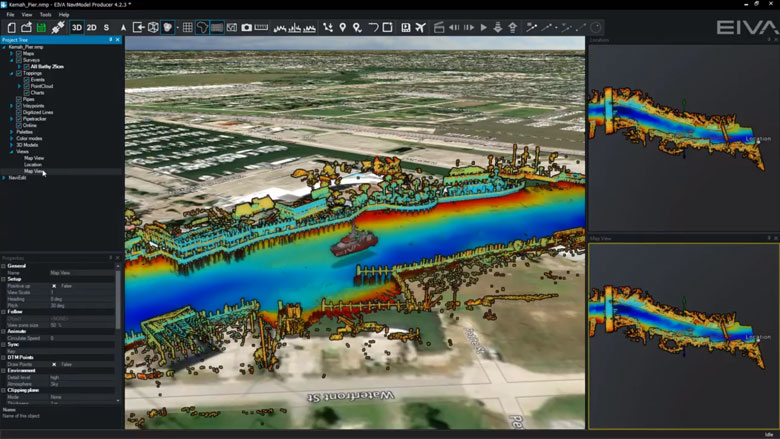
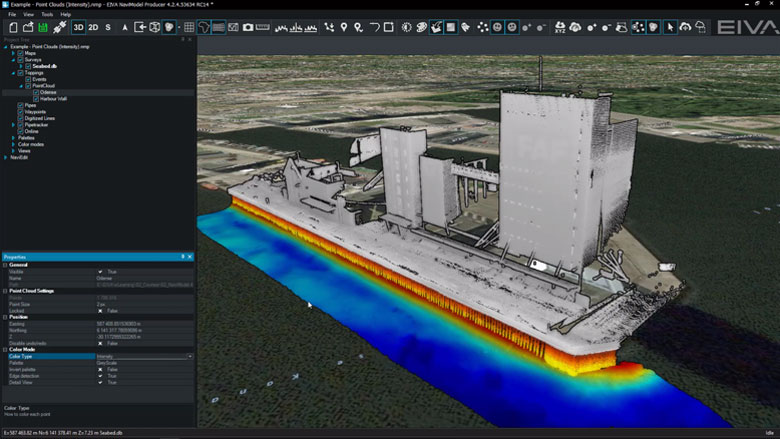
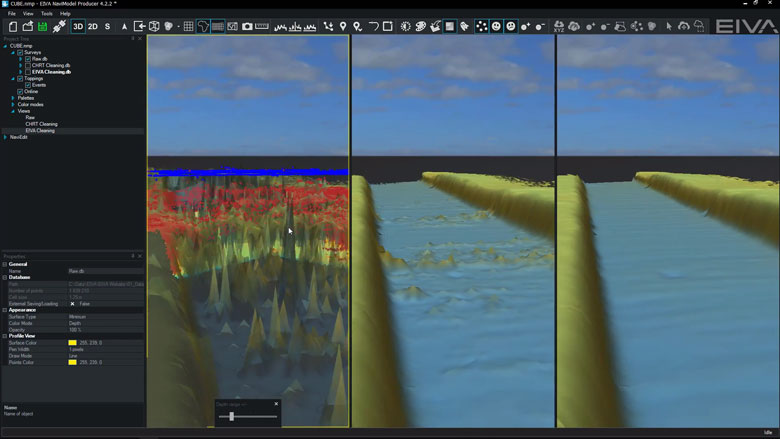
Visualise seabed terrain in the powerful 3D environment of NaviSuite, which provides many easy-to-use tools to effectively display data of interest. You can model the seabed terrain in colour modes representing information of the data modelled such as depth, slope, intensity, backscatter, standard deviation and ETC. These different colour modes can be displayed alongside each other in different views of your model, as well as with added contour lines (see an example in the video below).
Smoothly navigate survey results in NaviSuite’s high-performing 3D environment. NaviSuite uses a highly effective LOD method for visualising models, allowing the software to ensure optimal data presentation by making the most of your graphics card.
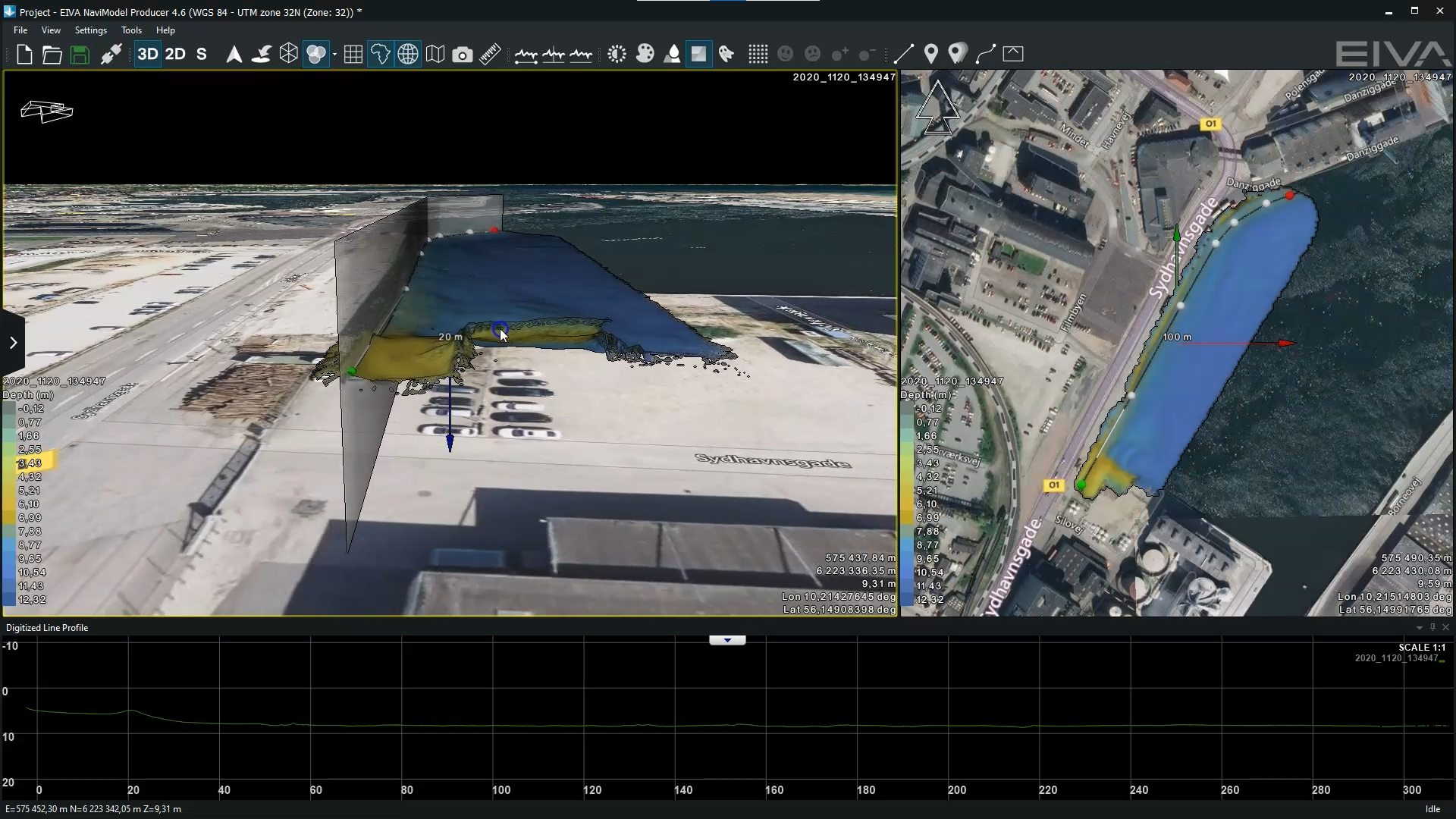
Multiple Map Views
You can display different views simultaneously, so you can keep track of different information visually. Map Views can for example be a map showing your location, 3D visualisations viewed from different angles and visualisations of data from different sensors. Each individual Map View window can be configured separately, so you can make a Map View displaying virtually any information you require.
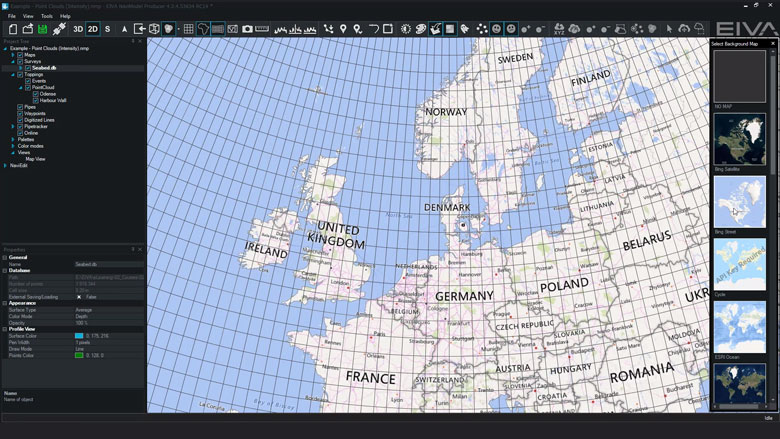
Background Maps
You can import existing third-party maps for example for line planning, navigation and procession quality control. Maps which can be displayed in NaviSuite include background maps from Web Map Service (WMS), geocoded images (for example geotiff), CAD drawings (for example DXF or DWG) and MicroStation drawings.
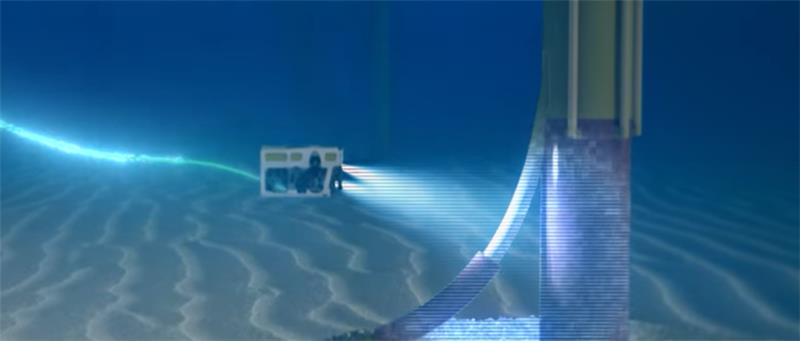
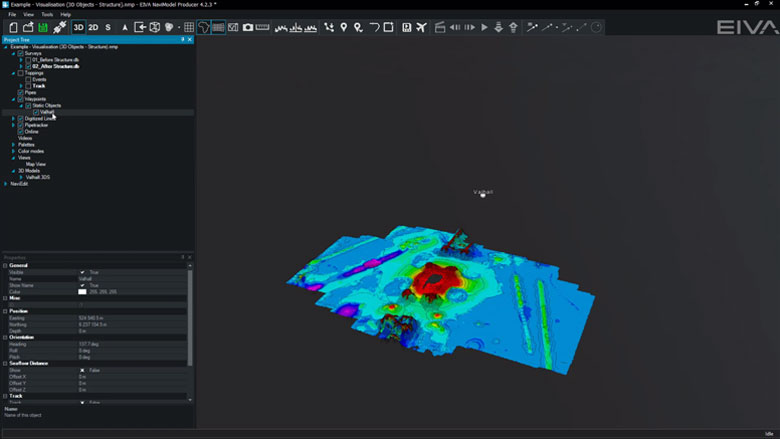
Import 3D models
3D models can be imported into NaviSuite (drag and drop into the Map View window) and displayed in this high-performance solution. This means that you can add 3D models of permanent structures on the seabed, such as foundations for offshore wind turbines, as well as templates for structures yet to be built. Not only that, NaviSuite also allows you to use a 3D model to display a dynamically positioned object, such as your vessel.
Link a 3D models to the vessel
Ensure quality control by getting a better view of the true scale of your model. NaviSuite allows the operator to attach real 3D models of vessels and vehicles to the 3D seabed display. The models can for example be in 3DS, STEP and OBJ mesh formats.
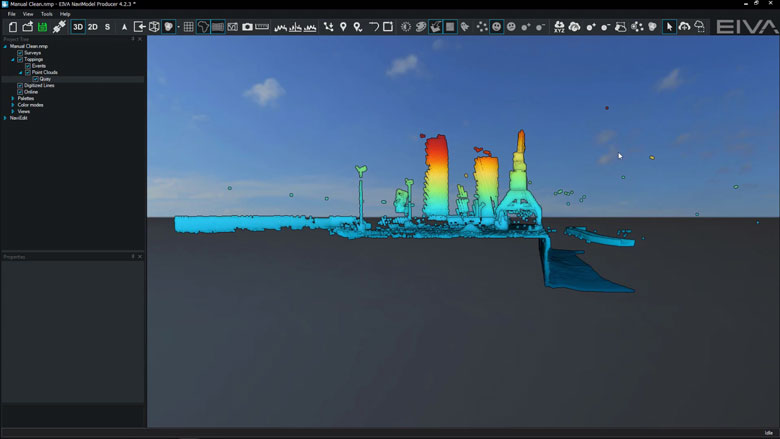
2D, 3D and side-view displays
NaviSuite facilitates better data interpretation by making it easy for the user to quickly change the view displayed. Display options are 2D, 3D and side-view, as shown in the tool bar. Orientation can be user-defined, north up, vehicle up or line up.
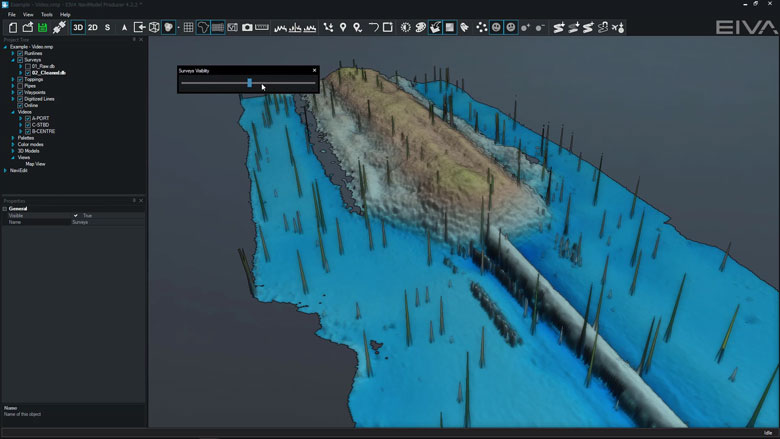
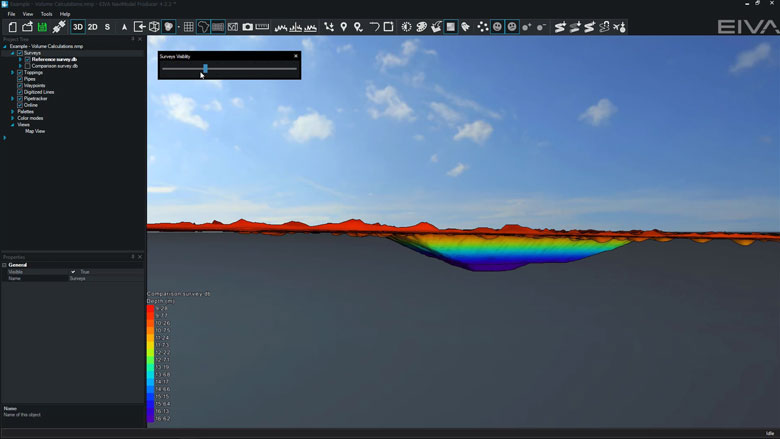
Visibility Slider
The visibility slider allows users to compare different DTMs quickly. This enables comparison over time or between different data processing methods, in 2D and 3D.
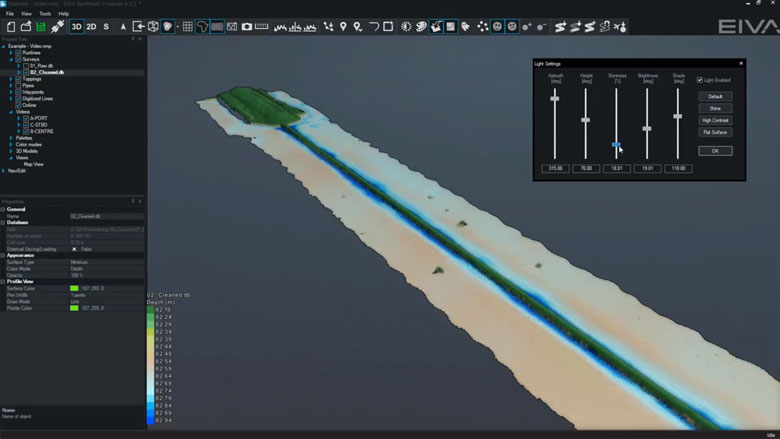
Control colours, lights and details
Effectively visualise information of interest by adjusting the light and palette settings on your DTM at any time. You can for example adjust brightness and shade settings, as well as use a variety of colour palettes, from grey scale to rainbow. Get a peek at the options in the following video.
Profile views
The following profile views are available:• Cross Profile• Long Profile• Quick Profile• X & Y Axis Profile• View Profile
Create fly-through videos
Fly-through videos can be created for project or promotional presentations.
-
Autonomy tools
Perform autonomous operations with tools to automate your survey every step of the way – from survey route planning to remote controlled, autopilot operations.
Features enabling autonomous operations
NaviSuite Kuda enables autonomous operations with tools to automate your survey every step of the way – from survey route planning to remote controlled, autopilot operations. Dive into how…
Automatic survey route planning tools
Ensure efficient coverage during surveys with tools for survey route planning. These intuitive tools help ensure your survey is performed optimally – through highly customisable and automated route planning.
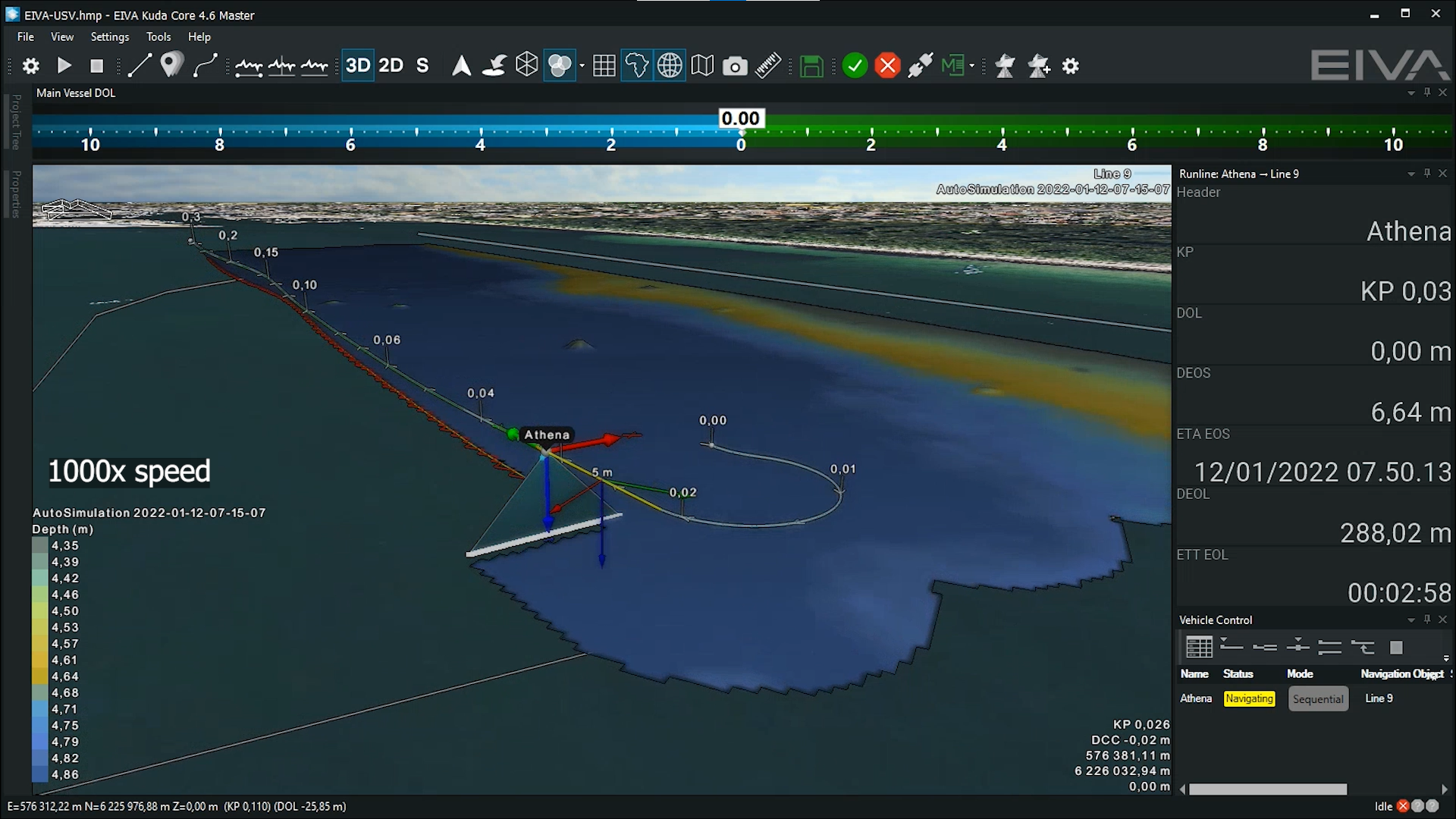
Onboard automatic route planning during surveys
Conditions such as the weather can influence your coverage during a survey. In order to adapt to such factors, you can use the Coverage Assist tool, which plans runlines in real-time during the survey. Each time it creates a runline, it considers the previous surveyed line, as well as the optimal route for turning. This saves you time as it makes decisions onboard the vessel in real-time.
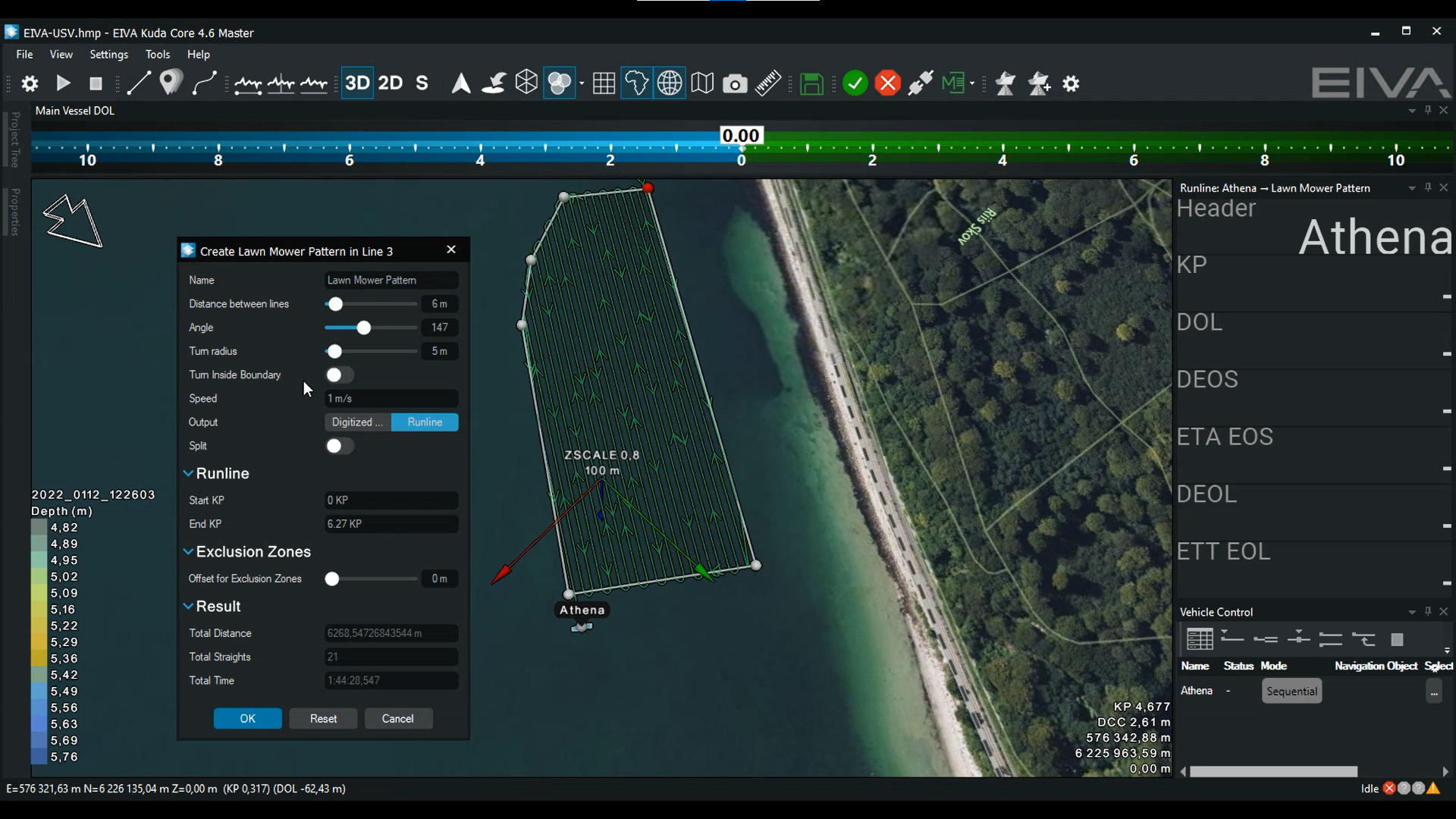
Autopilot route planning by defining a boundary
The vehicle route can be automatically created before a survey, based on a boundary. If your vessel has an NMEA autopilot, you can export route plans from NaviSuite to the onboard piloting system.
You can design the lawn mower type pattern depending on the desired spacing and orientation. You can also create an exclusion zone within the boundary.
Autopilot total solution for safe and optimised surveys
To ensure centimetre precision line-keeping and safer operations, you can equip your vessel with the NaviSuite Kuda – Autopilot. This autopilot enables extensive USV control in NaviSuite Kuda, for example precise line-keeping in sharp turns and a hold position capability, as well as allowing you to monitor your thrusters and easily switch between manual and automated steering.
In addition, this total solution provides many precise vehicle control features. Users can for example increase safety of autopilot operations – by defining emergency stop settings, as well as quickly taking manual control. Users can also improve the quality of data by adjusting the vehicle’s speed (while the survey is running on autopilot) if real-time collected data shows that the speed should be changed, for example decreasing the speed due to seeing holes in the real-time QC displays of collected data.
Remote control from anywhere in the world
NaviSuite software enables you to operate control systems from anywhere in the world.
Remote control even at low bandwidth
One of the challenges to remote control is low data bandwidth. With NaviSuite you can overcome this in several ways…
Live data compression
You can compress survey data in many ways to ensure uninterrupted signal. NaviSuite compression tools work on multi-beam echosounder, sidescan, laser and forward-looking sonar data.
The settings you can adjust include Along, which allows you to skip scans. As well as Across, which reduces the points across the scan, and analyses points with respect to depth change to then keep more points where there are areas of change.
Pre-plan autonomous underwater vehicle (AUV) operations
NaviSuite lets you remotely control an AUV without requiring constant connection. You can send small mission updates to your AUV, requiring only one good link moment to input your instructions – for example to go at a certain depth, pitch and heading. This capability means that no matter if the connection fails, the AUV will follow the directions you input in your latest mission update.
-
Navigation tools
Efficiently and easily navigate a surface or subsea vessel using intuitive tools to plan routes and waypoints, track or pilot a vessel and more.
Navigation and routes features
Navigation and data acquisition are integrated in this software solution. Efficiently and easily navigate surface and subsea vessels using intuitive tools to plan routes and waypoints, track or pilot a vessel and more.
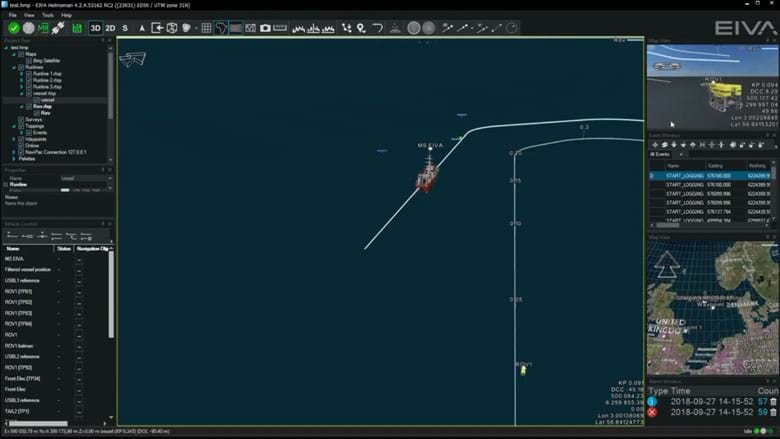
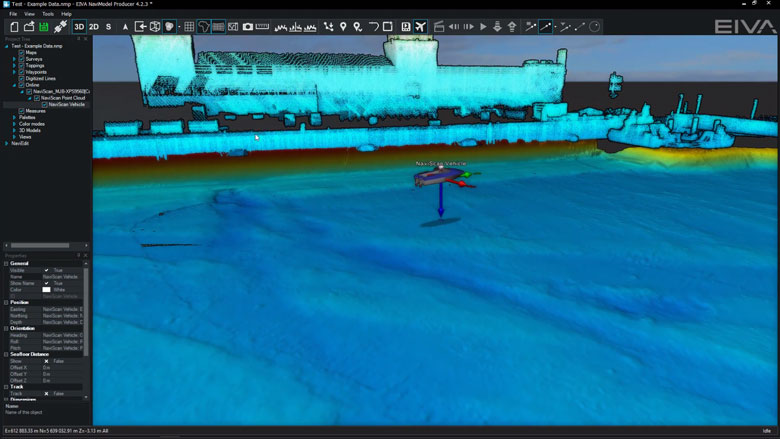
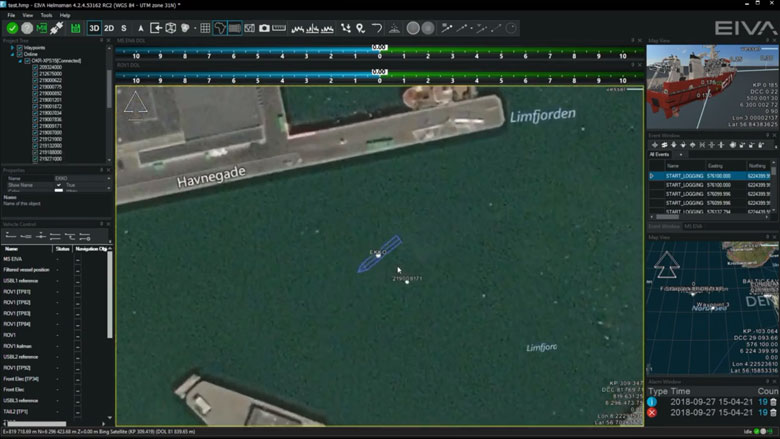
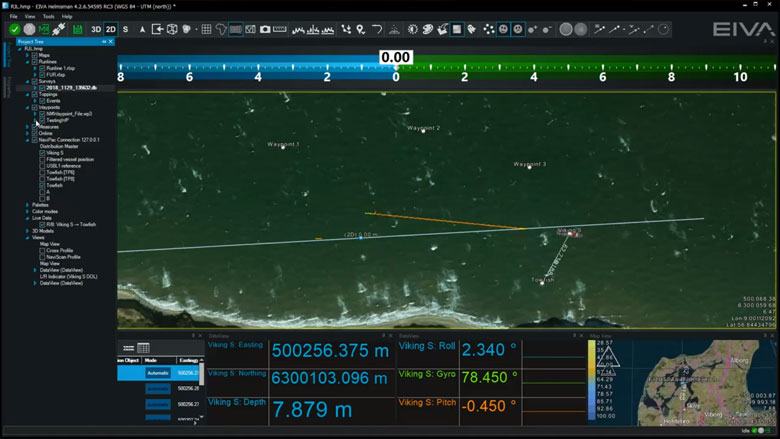
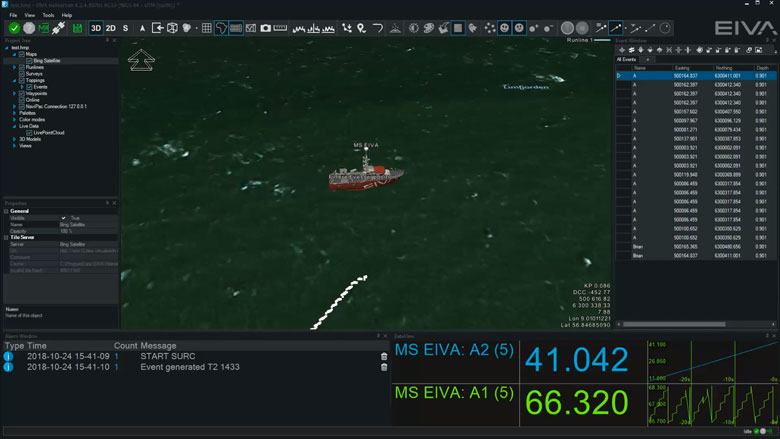
Display live position of a vehicle
NaviSuite supports display of vehicle data based on the NaviPac data feed. You can display the main vessel along with one subsea vehicle, such as an ROV or ROTV, on an unlimited number of local and remote displays. The data can be shown graphically in multiple map views.
AIS tracks
NaviSuite supports integration with AIS receivers. The data can be shown in a dedicated AIS window and overlaid in the NaviPac window. You can perform, read and utilise vessel dimension information.
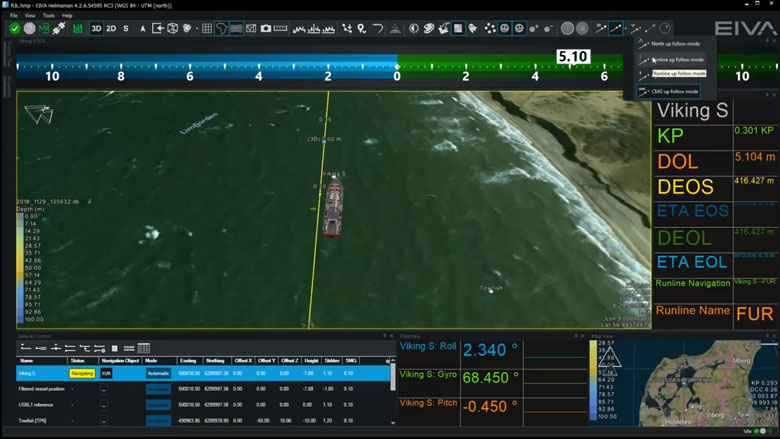
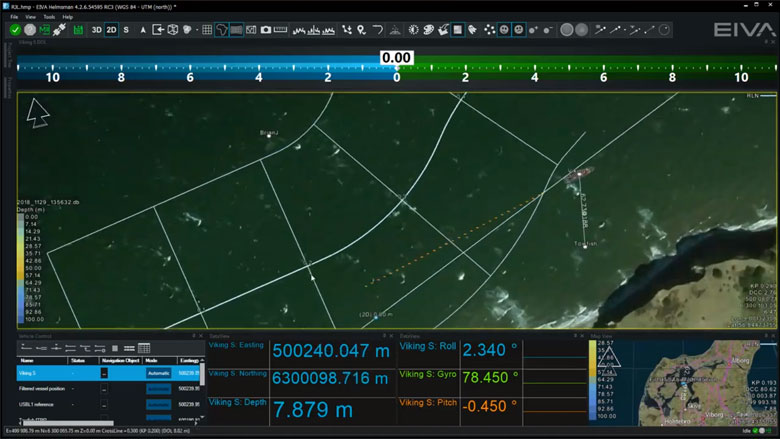
Display north-up, heading-up, route-up
Each Map View can be designed and controlled individually when it comes to content, overlays and layout. Map Views can be 2D, 3D or side-views, and orientation can be user defined, north-up, vehicle up or line up.
Manual waypoint drawing
NaviSuite supports a series of runline and waypoint formats including our own RLX/WPT format, ad generic ASCII readers. You can also draw lines and points directly in the Map View.
Various runline patterns (parallel, cross, star)
You can inherit multiple lines based on the base line defined, such as parallel or cross lines to get an optimal route plan.
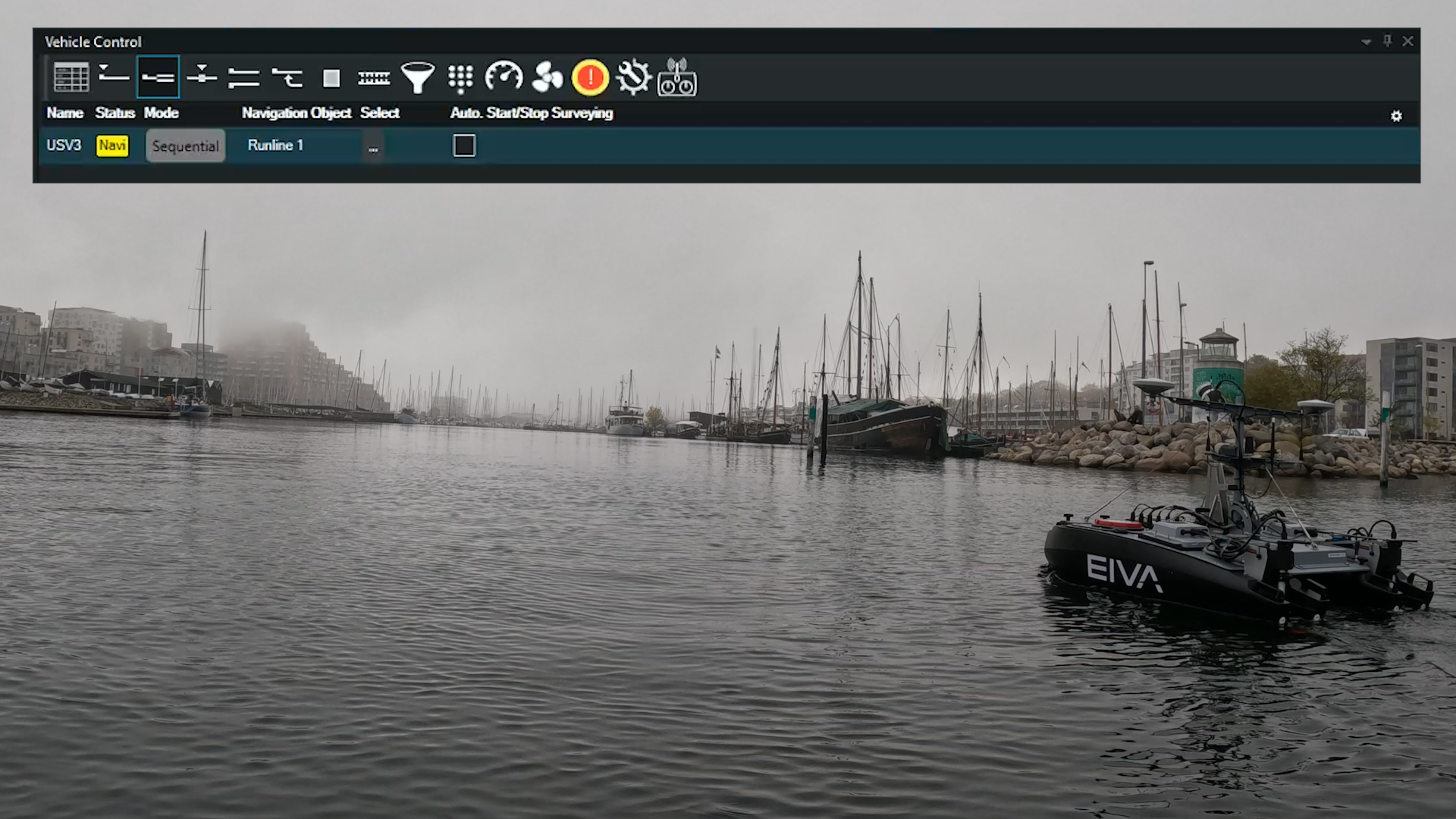
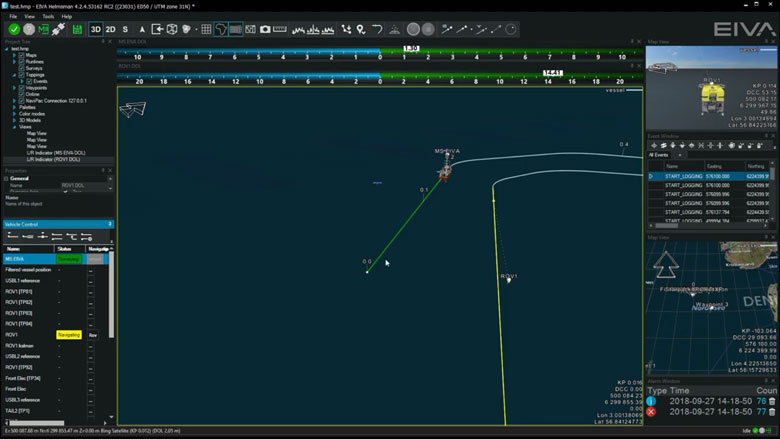
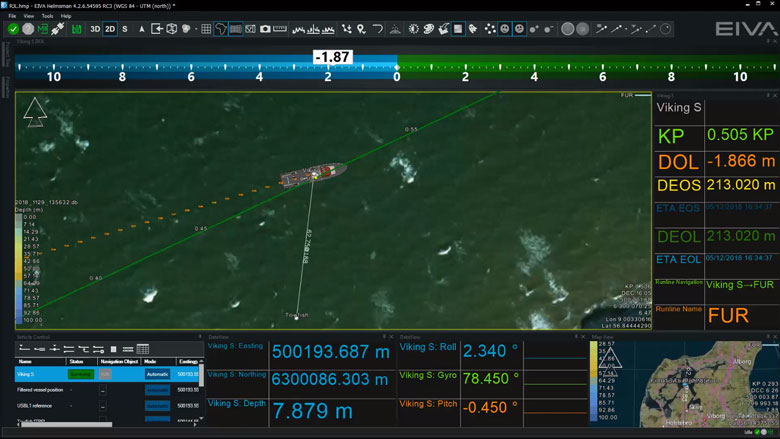
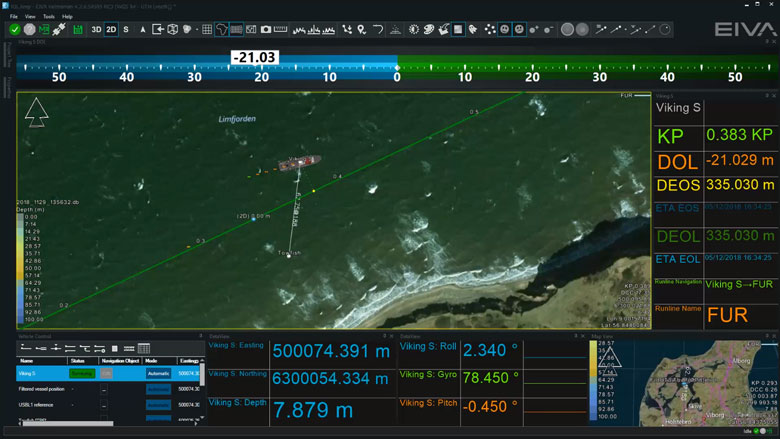
Vehicle control panel for multiple vehicle runlines and display DOL
Assignment of lines and waypoints are handled through the dedicated Vehicle Control view, as you may control multiple vehicles simultaneously. Each controlled vehicle will be available as distance offline indicator (DOL/DCC) and various runline information (along line, target ETA etc).
Distance to waypoint
Waypoints are handled in a similar manner to runlines, as assignment of the waypoint is done in the Vehicle Control View. Hereafter, an artificial runline is created from the vehicle to the point and NaviPac monitors the range/bearing to the destination. and can a,.o. feed that into autopilots and DP systems.
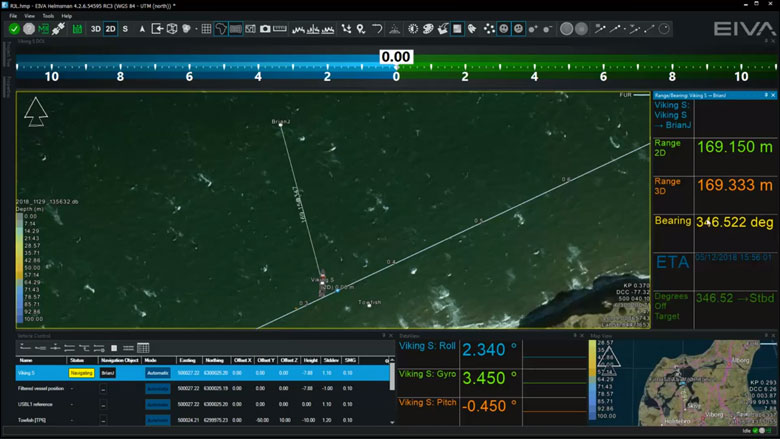
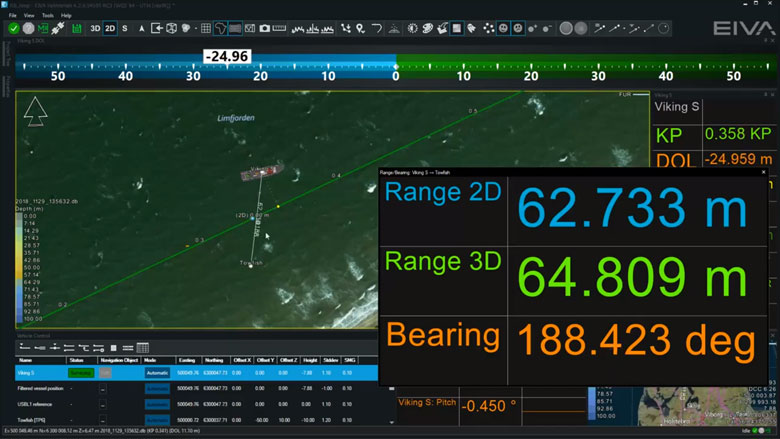
Multi-object live range/bearing
In NaviSuite, you may pair live vessels and monitor the range/bearings between them for online display as live data and range information on Map Views.
Auto-pilot (NMEA) control
When using runlines and waypoints you may connect NaviPac to autopilot systems using e.g., standard NMEA formats and pass cross-track error and destination waypoints on to the equipment.
DataUnits
NaviSuite supports use of other data units in addition to metric. The unit is selected in the project settings and all definition fields are then assumed to be in the selected data unit.
NaviSuite will follow the selected data unit, but you may, by using a simple keystroke, toggle between metric and data unit if required.
Data recording will still be metric to guarantee data integrity, but data outputs can be selected freely.
-
Sensor interfacing
NaviSuite Kuda is interfaced and integrated with an extensive list of sensors for hydrographic surveys, including multi-beam, LiDAR, single-beam, sidescan and FLS.
Sensor interfacing
NaviSuite Kuda Pro supports many different sensor types, providing easy interfacing and integration, as well as yielding visual and precise results quickly. Sensor types include positioning, FLS, MBE and SSS. Dive into a few examples…
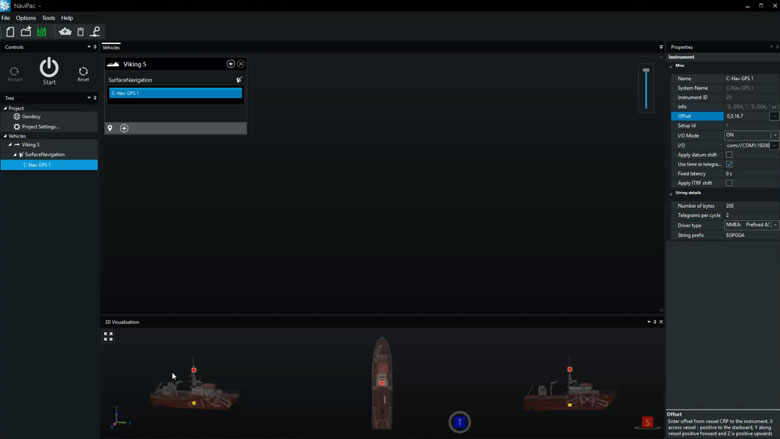
Surface positioning and motion (GPS, Gyro, IMU)
Setting up an entire vessel based project in NaviSuite Kuda is easy performed using intuitive graphical definition tools. This video covers basic project definition, geodetics and vessel navigation setup.
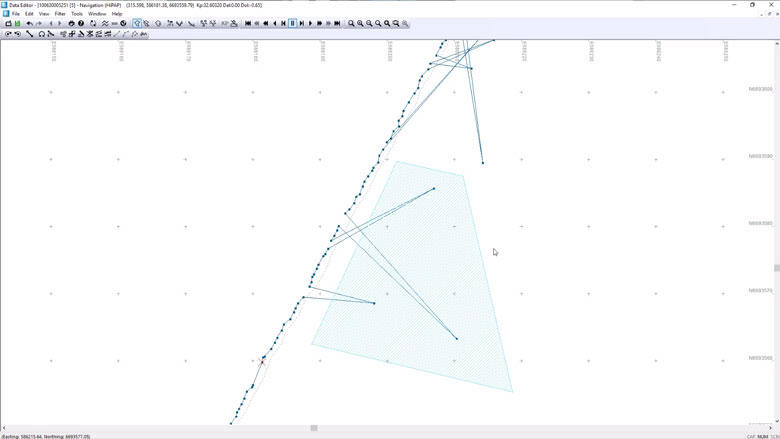
Subsurface positioning (USBL, DVL, INS, Gyro, IMU)
Setting up a remote or subsea vehicles is done in a similar manner to the main vessel – easy and intuitive. Adding instruments, positioning sources (transponders, INS, LBL etx) and defining weighting and Kalman filter settings is possible.
SBE - single beam echo sounder
Single beam echo sounders and other single source data suppliers can easily be interfaced, either via standard drivers or enhanced user-configurable drivers. Single source data can be shown as points clouds in the NaviPac window – and you can automatically derive DTMs out of it.
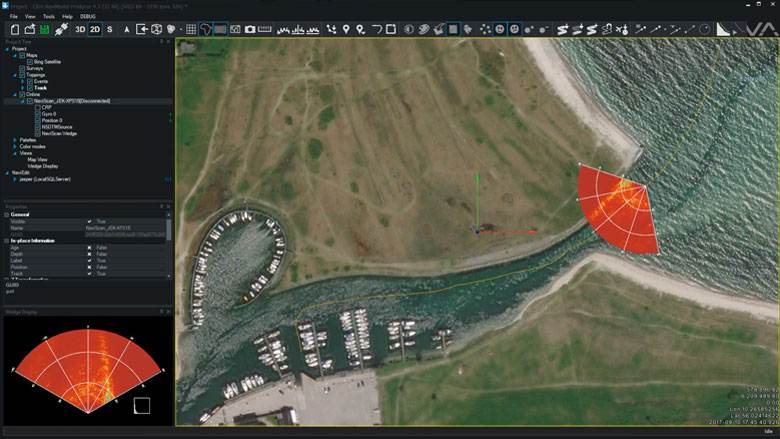
FLS - forward looking sonar (wedge and mosaic)
NaviSuite Kuda Pro supports a series of forward looking sonars such as eg. Tritech, Didson and Norbit. The data is interfaced and recorded, then made available for display in NaviPac as both a stand-alone wedge display and 3D wedge display in the Map views.
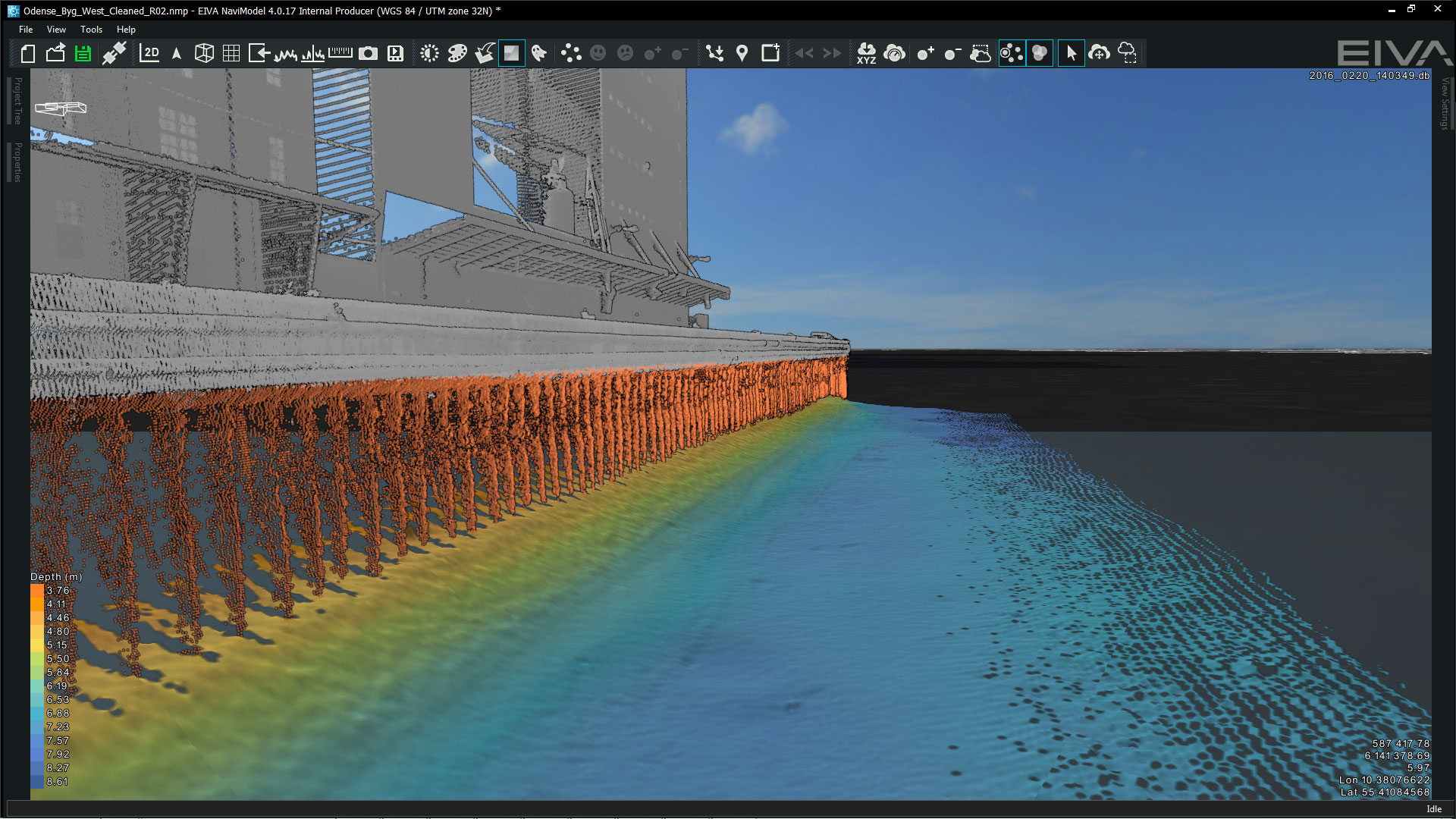
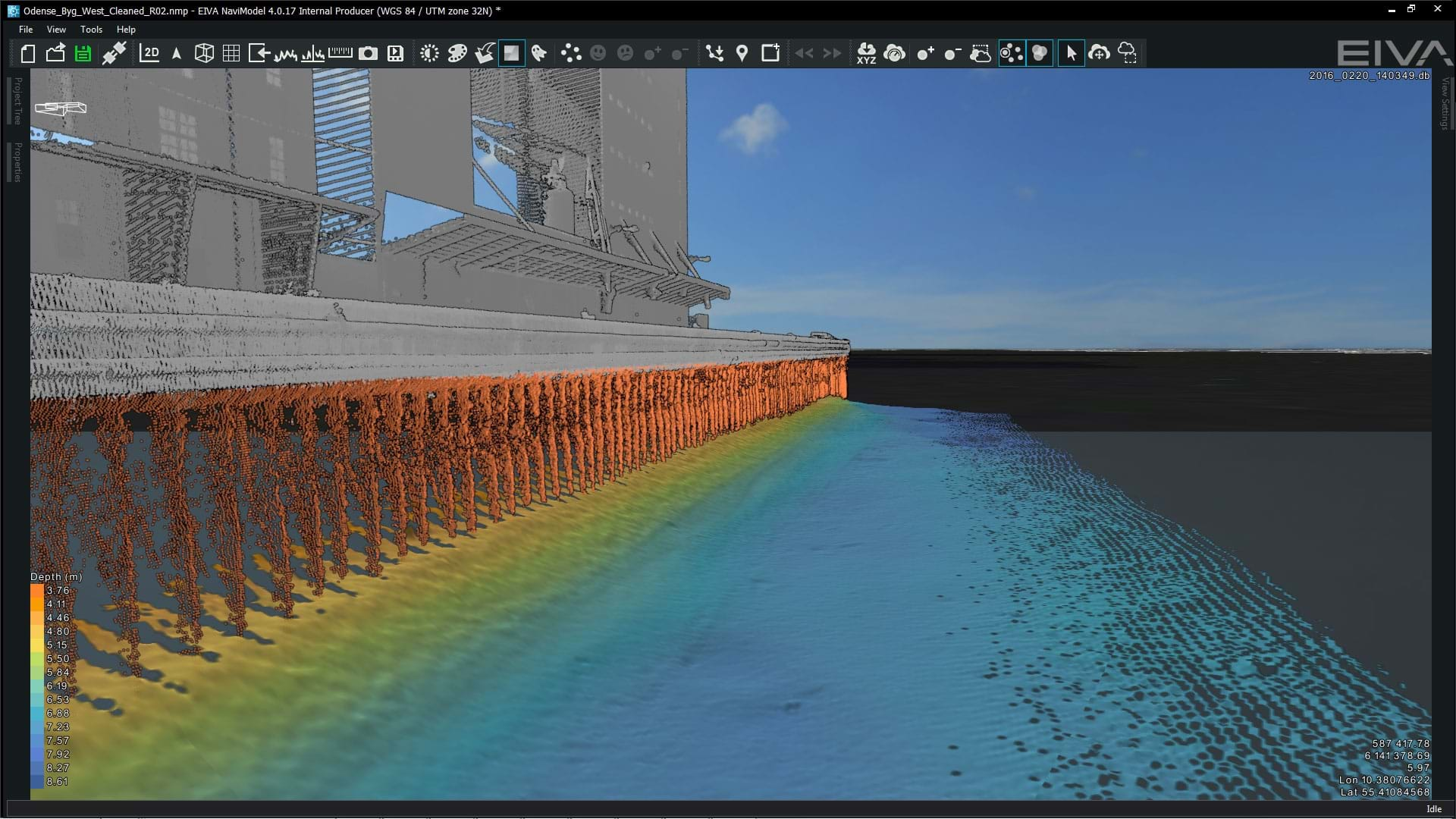
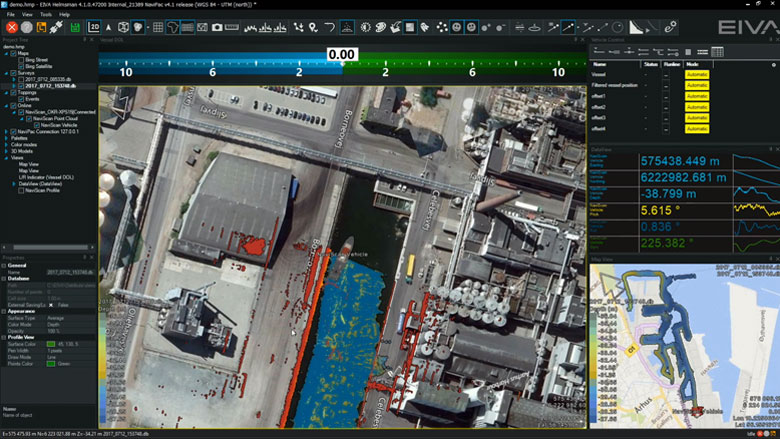
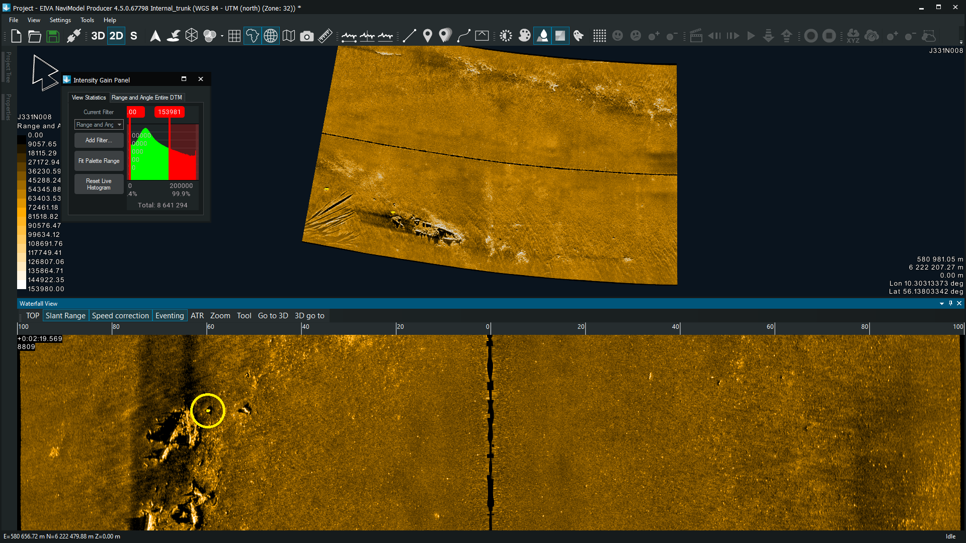
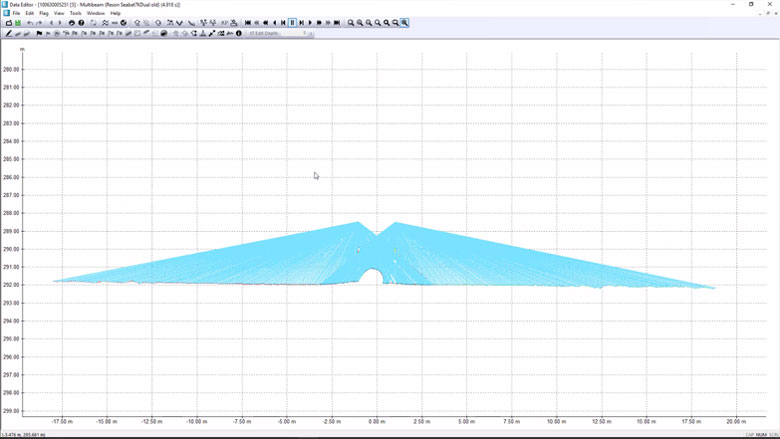
Visualise multi-beam echo sounder and laser data
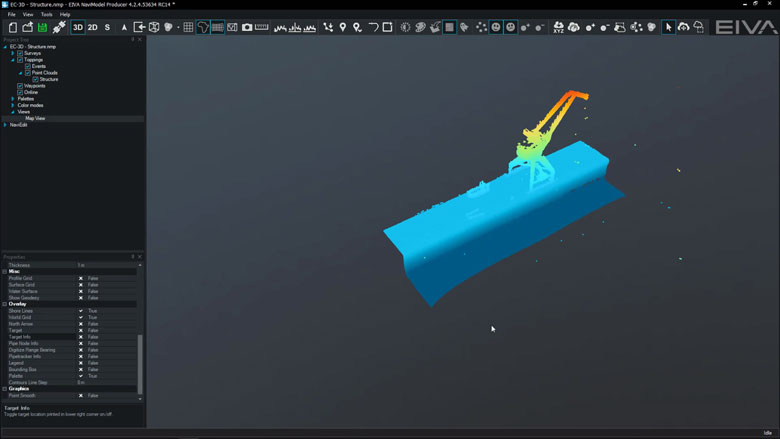
When you have interfaced and recorded data from multi-beam echo sounder, laser or sidescan sonars in NaviSuite Kuda, you can easily display and quality control (QC) the data. This is done by using raw point clouds, terrain models or data profiles. On these results, you can QC your data by looking at data density, model standard deviation, etc.
In addition, NaviSuite Kuda provides the EC-3D automatic data cleaning tool, which enables you to instantly yield deliverable results from your survey.
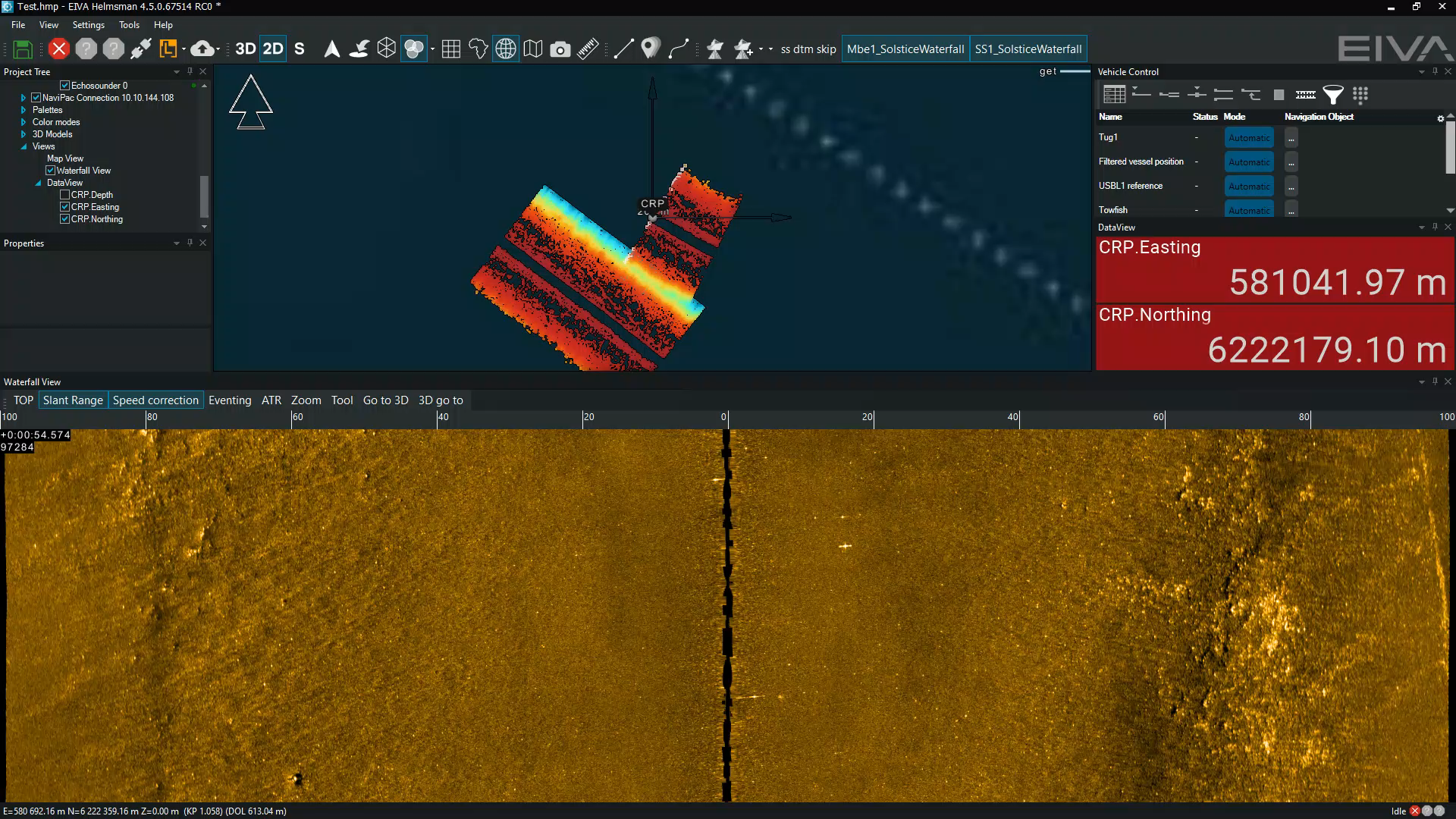
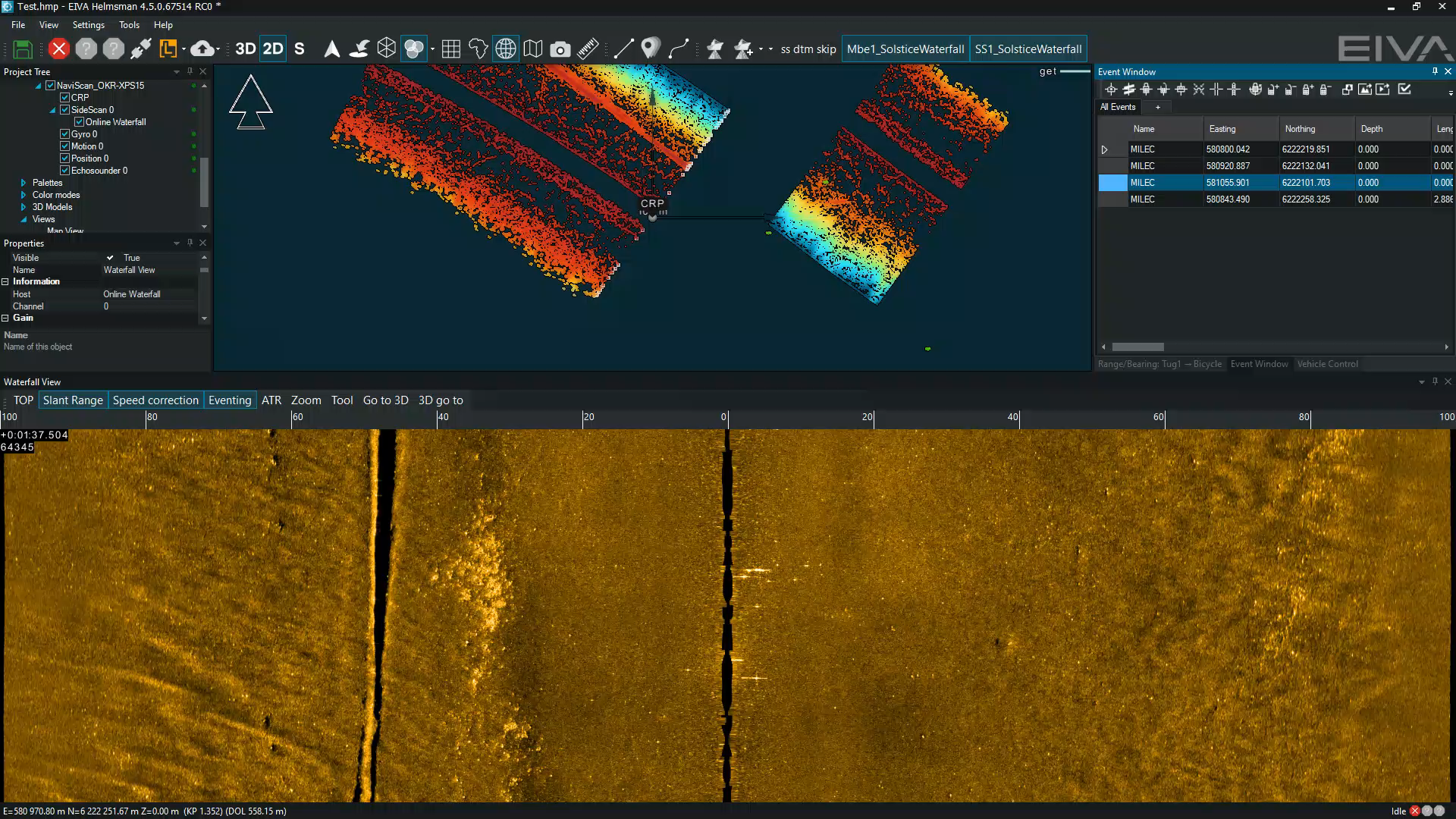
Display and event sidescan sonar data
Sidescan data is can be interfaced in NaviSuite Kuda and recorded in the SBD data format. The data can be shown both in real-time and in replay in a special waterfall data display. This data display will also enable target markings (eventing) and image management.
Configurable displays
In the waterfall display, you can control the flow without disturbing the collection of data. You can, for example, look back in time and adjust your views based on slant range, speed and resolution. You can also show several waterfall displays on your screen, so you can for example view the data as it is collected in the one and use the other to look back and forth in the data. The waterfall display also features a zoom tool, which makes sure that, even on a small monitor, you can view areas of interest in full resolution.
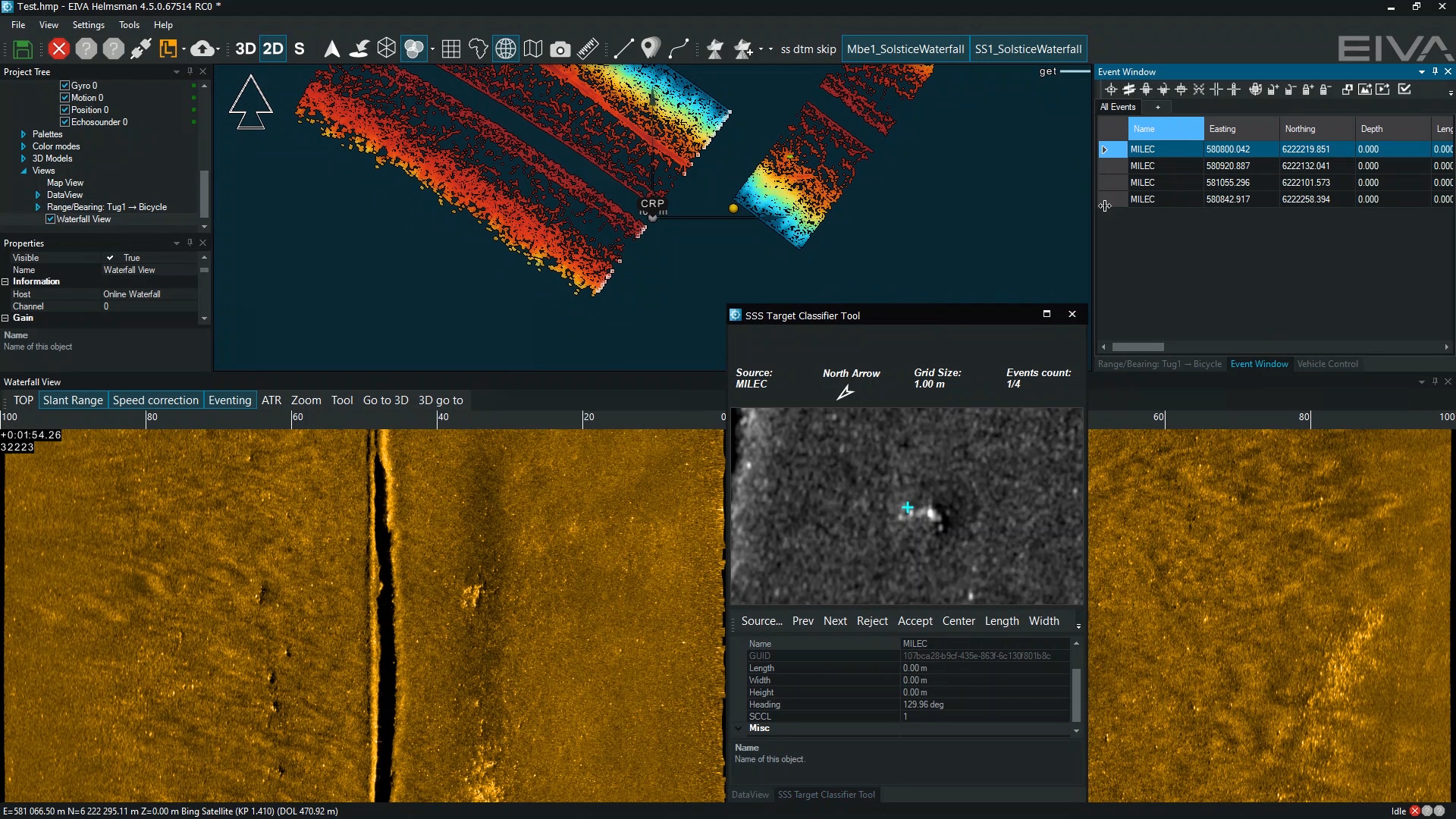
Eventing
You can register events simply by clicking on a target in the waterfall display. Your selected targets will be registered in the event window as well as your waterfall display and 2D/3D model. This data can easily be exported to NaviModel for further processing.
After registering an event, you can adjust the size and location of the target. The event will be correlated in all displays, so any changes you make are updated in all displays.
The eventing tool also can be used to measure the length, width and height of the event.
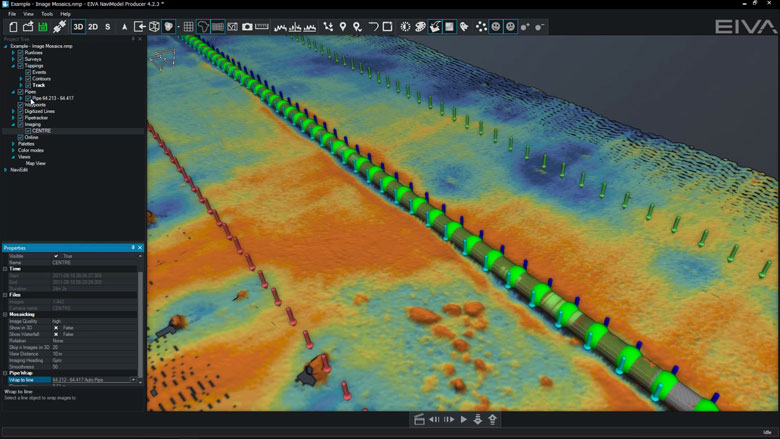
Mosaic visualisation of sidescan data
Create a mosaic visualisation of your sidescan data in NaviModel. This mosaic can be used to generate an image or geotiff, which can be exported.
-
Sensor processing tools
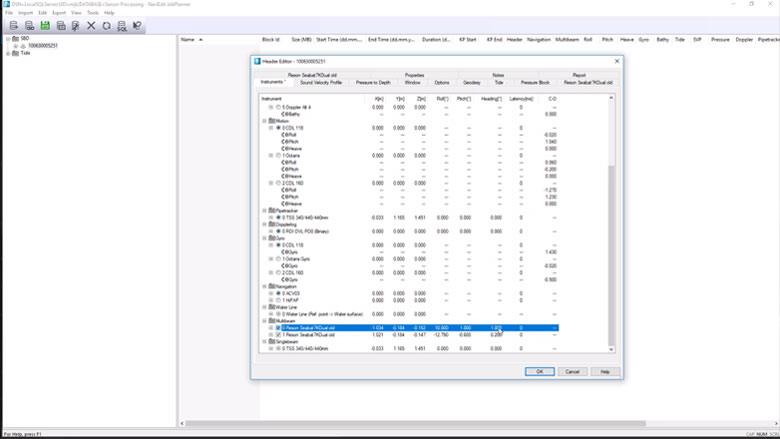
NaviSuite Kuda can recalculate data very quickly where sensor processing takes place. Here we change offsets, C-O’s, mounting angles, apply tide, apply SVP, de-spike sensors, improve object positioning, Kalman filtering, remove swell etc.
Sensor processing features
NaviEdit can recalculate data very quickly and where sensor processing takes place. Here we change offsets, C-O’s, mounting angles, apply tide, apply SVP, de-spike sensors, improve object positioning, Kalman filtering, remove swell etc.
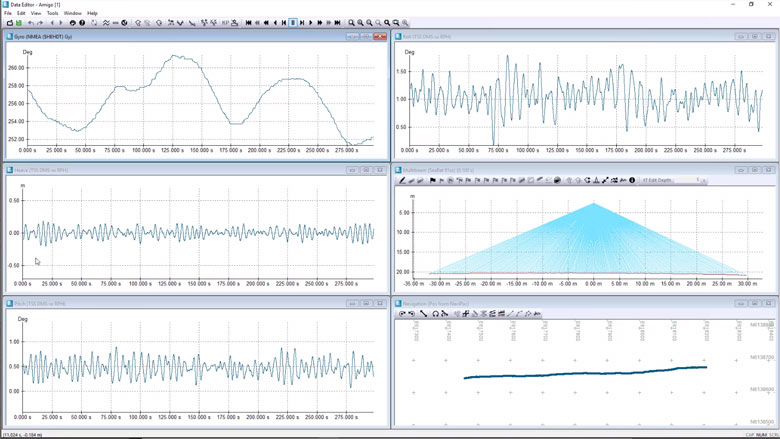
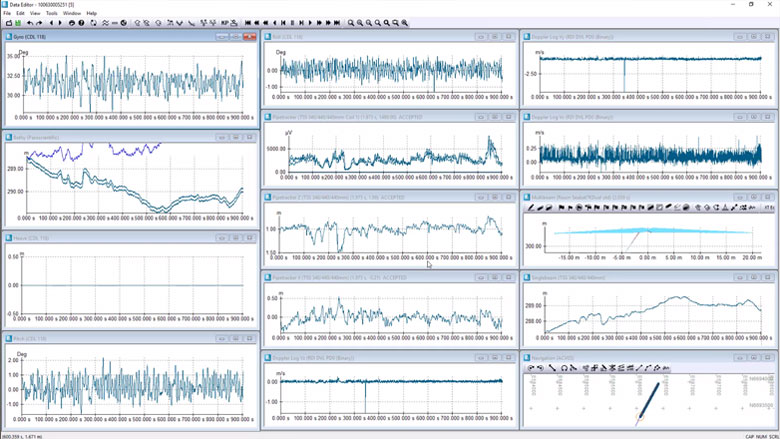
Subsurface positioning (USBL, DVL, INS, Gyro, IMU)
You can check an ROV setup. View and QC sensor data via a series of graphical displays.
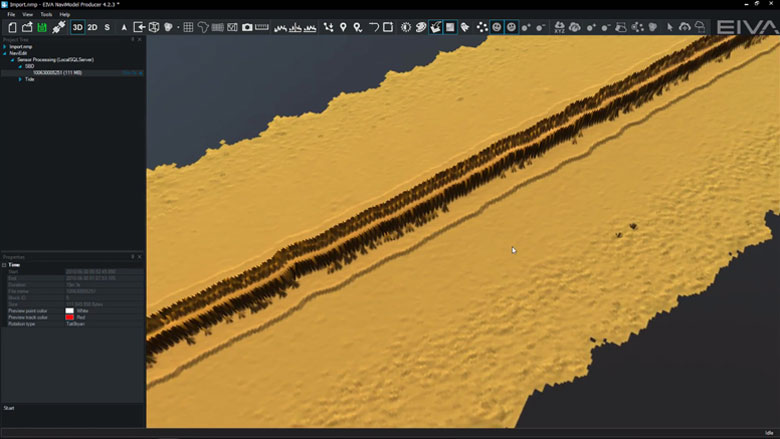
Multibeam echosounder (MBE)
MBE data can be both acquired and modelled in NaviSuite.
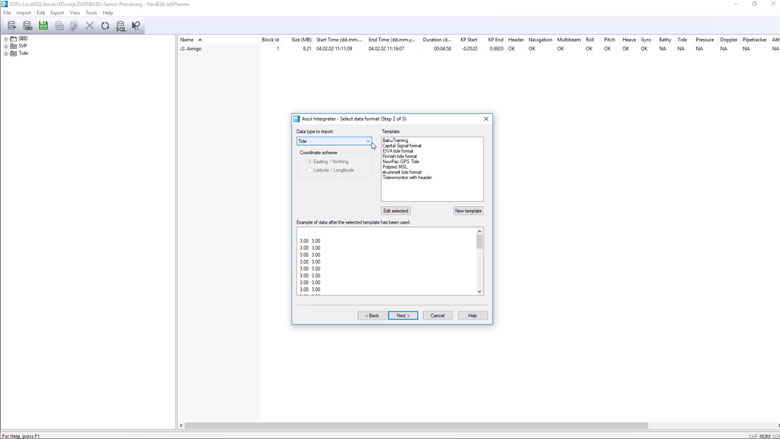
Tide corrections
Predicted or observed tides can be imported into NaviSuite using user-defined import templates.
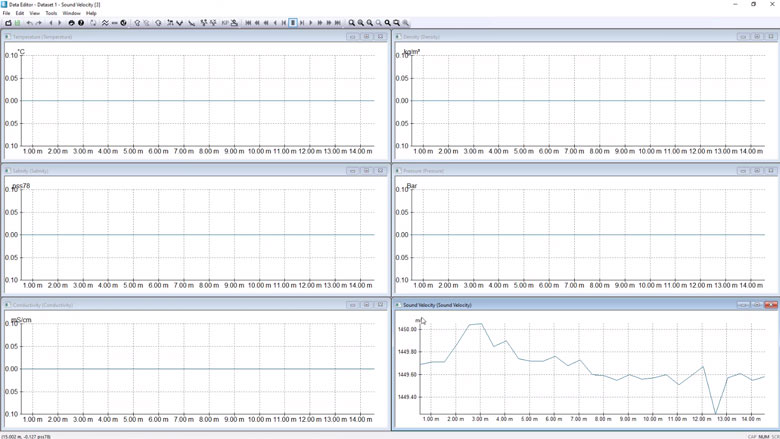
SVP corrections
CTD or SVP can be imported into NaviSuite using user-defined import templates.
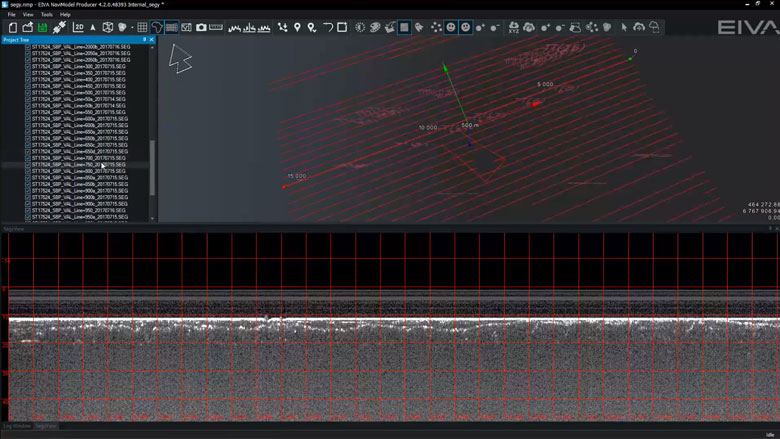
Sub-bottom profiler (SBP)
You are able to work with several SEG-Y files in NaviSuite at the same time. When loading the sub-bottom profiling data, the software extracts a rough track that is then taken through a two-step process of extracting a point every 100 metres, and then refined to 3 metres.
Change offsets, C-O's and mounting angles
Sometimes incorrect measured offsets, C-O’s or mounting angles are entered into the online acquisition system. NaviSuite enables you to correct these errors.
Raybending corrections
Sometimes Sound Velocity values are incorrect and we need a tool to perform a local correction. In NaviSuite, we can visualise the Sound Velocity corrections before we apply them.
Sensor editing (import and manual editing)
If required, you can run the following actions:• De-spike• Interpolate• Delete• Translate• Scale• Rotate• Smooth
-
Sonar and subsea laser data cleaning tools
Clean point data with a plethora of tools: manual or automatic, real-time or post-processing.
Sonar and subsea laser data cleaning
Clean point data with a plethora of manual or automatic tools. Cleaning operations can be applied multiple times to a complete data set or user-defined areas.
EIVA’s data cleaning tool EC-3D
EC-3D supports many automatic and manual data cleaning methods which can be customised and combined for optimal effect. EC-3D is efficient at cleaning data, whether it be 3D or 2D, point clouds or DTMs.
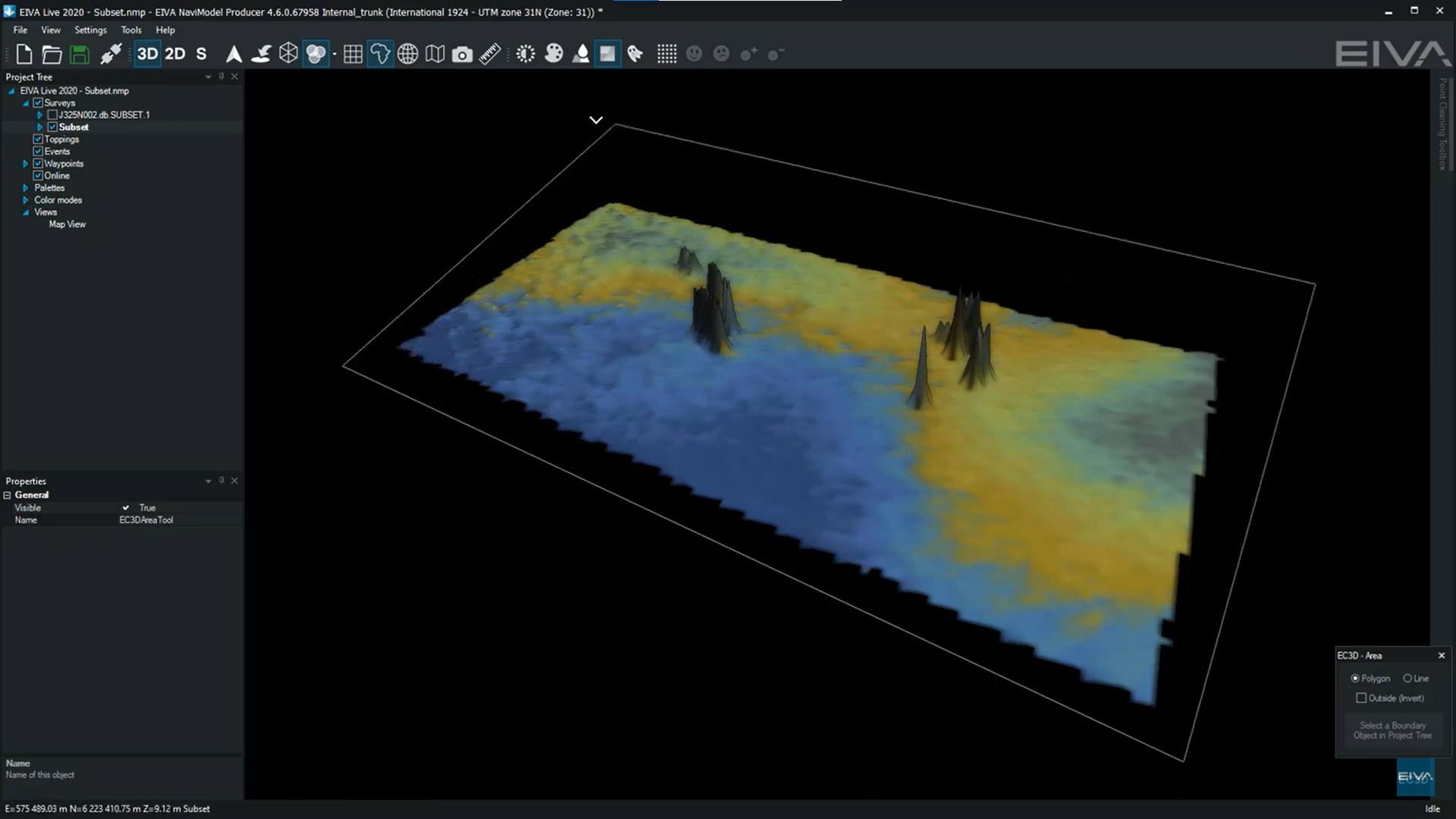
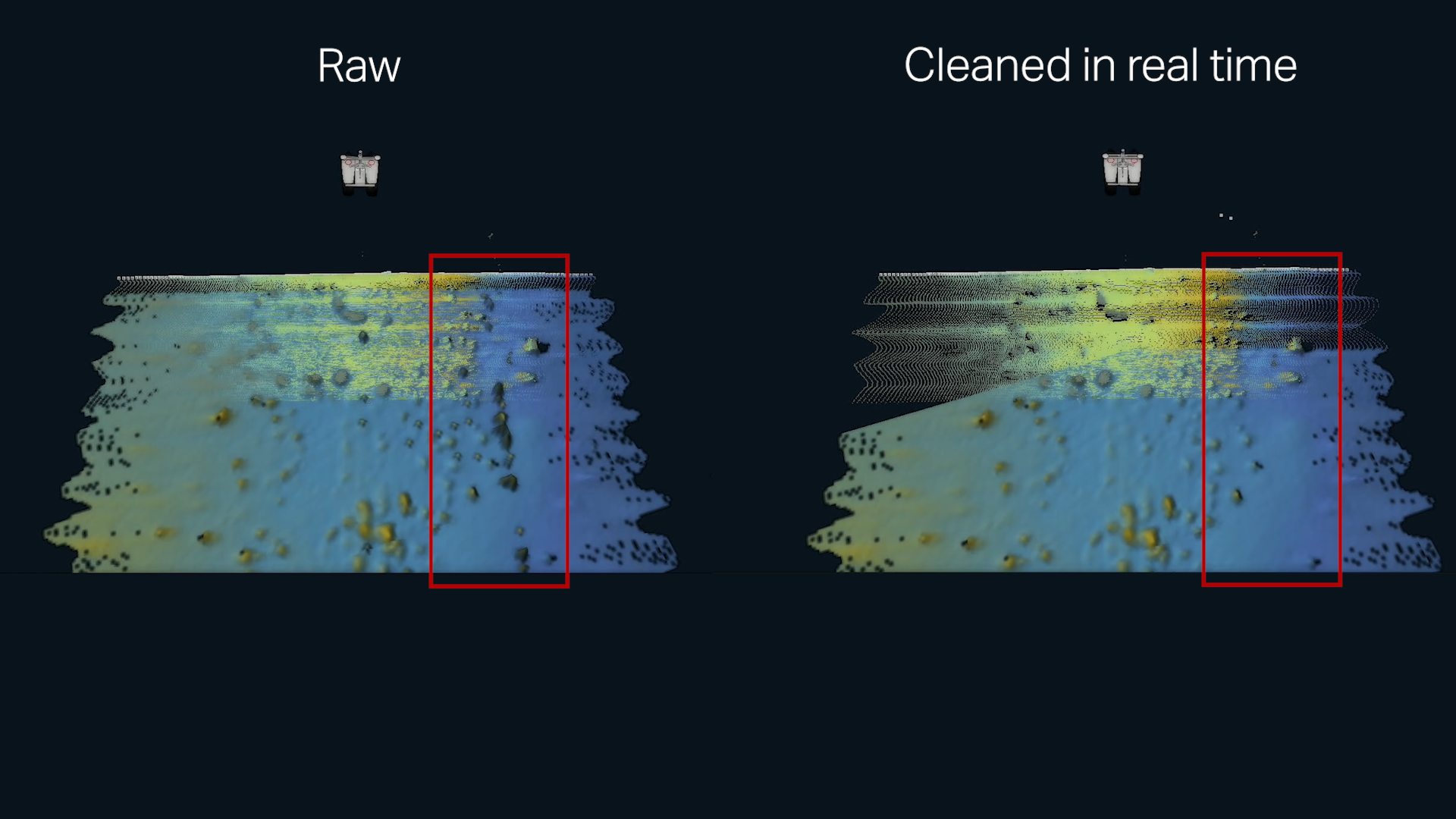
Real-time DTM cleaning
EC-3D cleaning filters can be applied to sonar data in order to clean data in real time as it is being acquired and displayed. The real-time DTM cleaning feature does not modify the acquired data – all the acquired sonar points are available for post-processing after the operation.
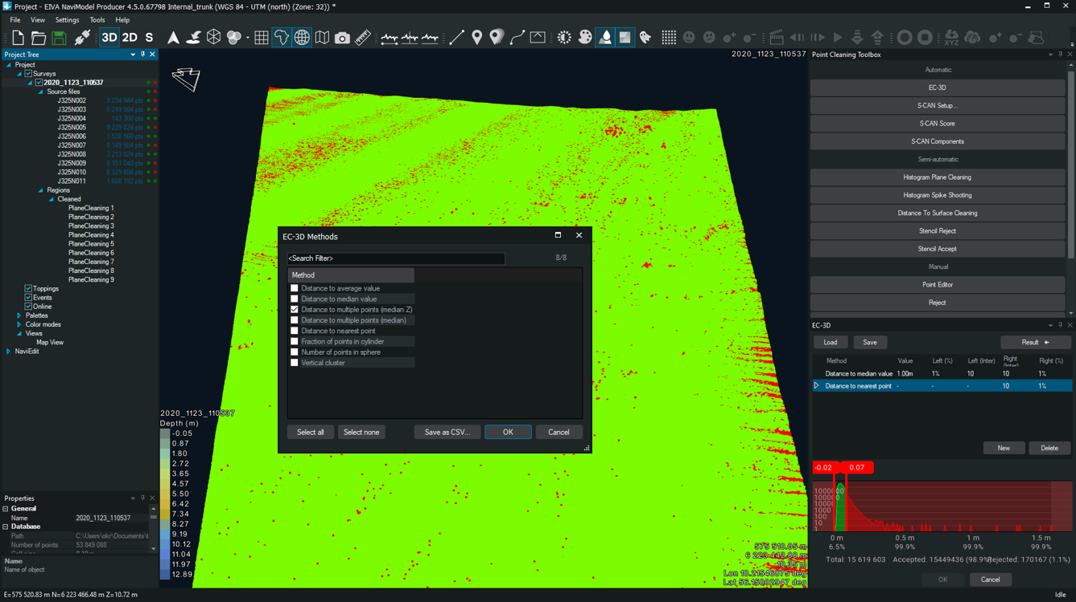
EC-3D features many data cleaning methods
Rather than assuming one method will always work perfectly, with EC-3D, you can use a variety of different methods to identify noise in your data. The many data cleaning methods featured in EC-3D include…
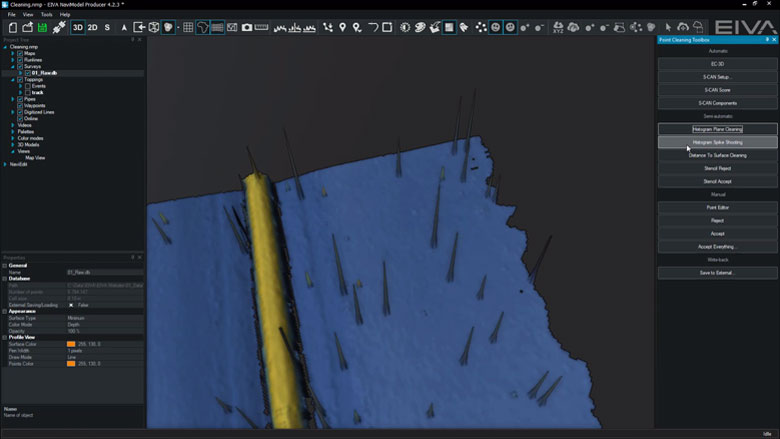
- Histogram spike shooting
- Histogram plane cleaning
- Distance to surface (DTM only)
- Distance to average value
- Distance to mean value
- Distance to nearest point
- Distance to multiple points (median Z)
- Distance to multiple points (median)
- Number of points in a sphere
- Fraction of points in cylinder
- Vertical cluster
You can import and customise the parameters of individual cleaning methods.
Combine cleaning methods
You can run multiple cleaning methods simultaneously, combined in different ways. You can save and load your EC-3D method configurations, so you can use them again on several data sets.
When combining cleaning methods, you can group them as Relative or Absolute. Absolute methods will clean points regardless of any other cleaning method. While Relative methods will clean points in voted-based manner. For example, ‘at least two out of four methods must agree on a point being marked as noise before it is removed’.
Histogram Spike Shooting
Histogram Spike Shooting can be used to reject or accept DTM points.
Points are selected if they are inside a circle.
Histogram automatically sets the rejection thresholds (can be manually over-ruled).
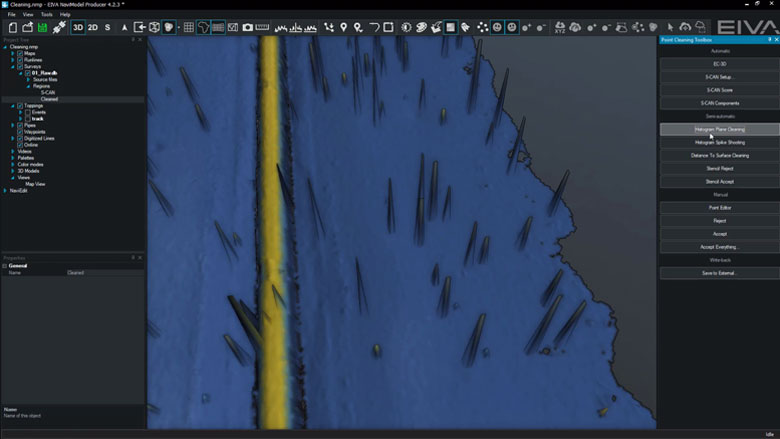
Histogram Plane Cleaning
Histogram Plane Cleaning tool can be used to reject or accept DTM points.
Points are selected if they are inside a corridor, polygon or an existing boundary.
Histogram automatically sets the rejection thresholds (can be manually over-ruled).
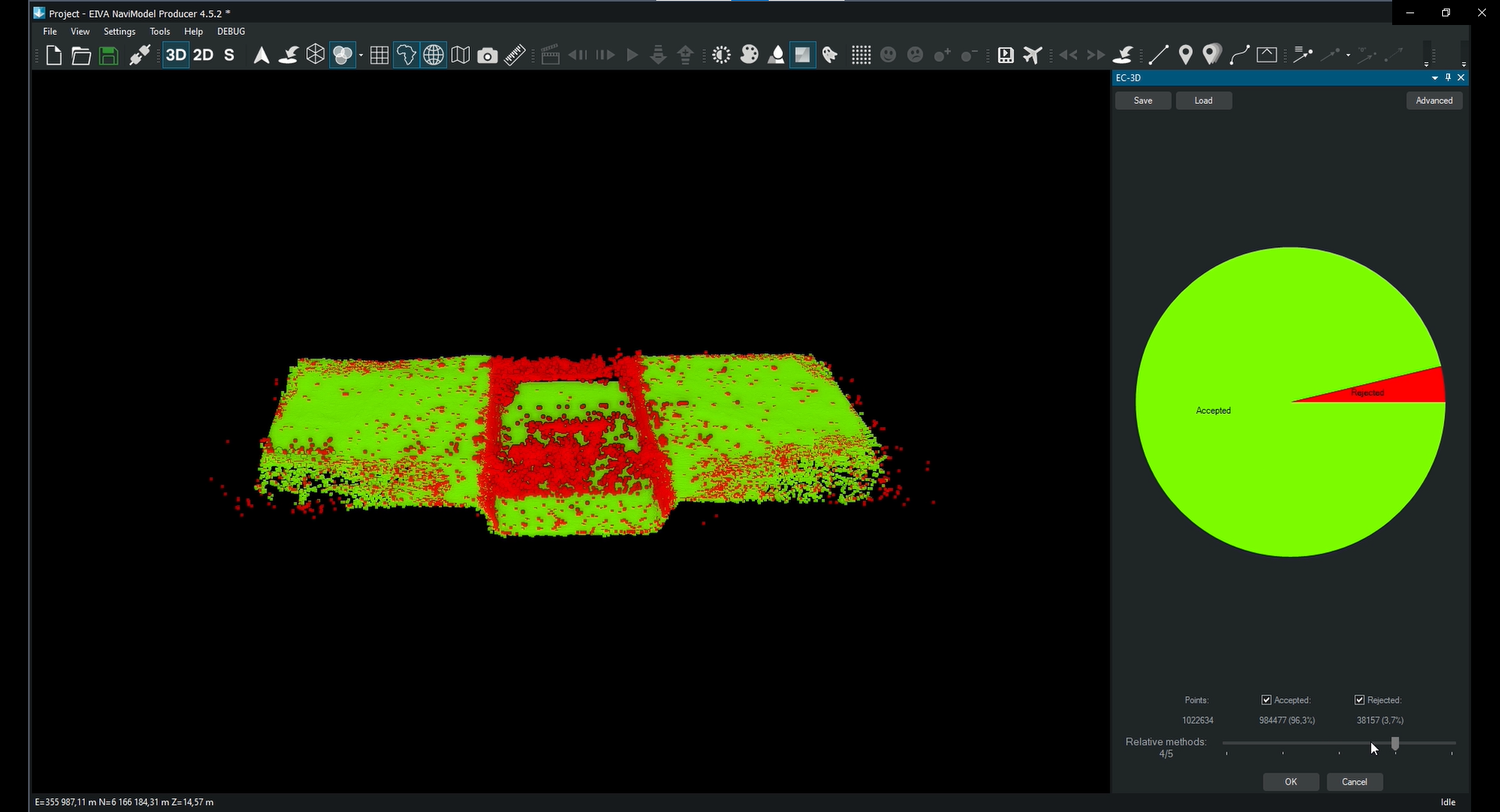
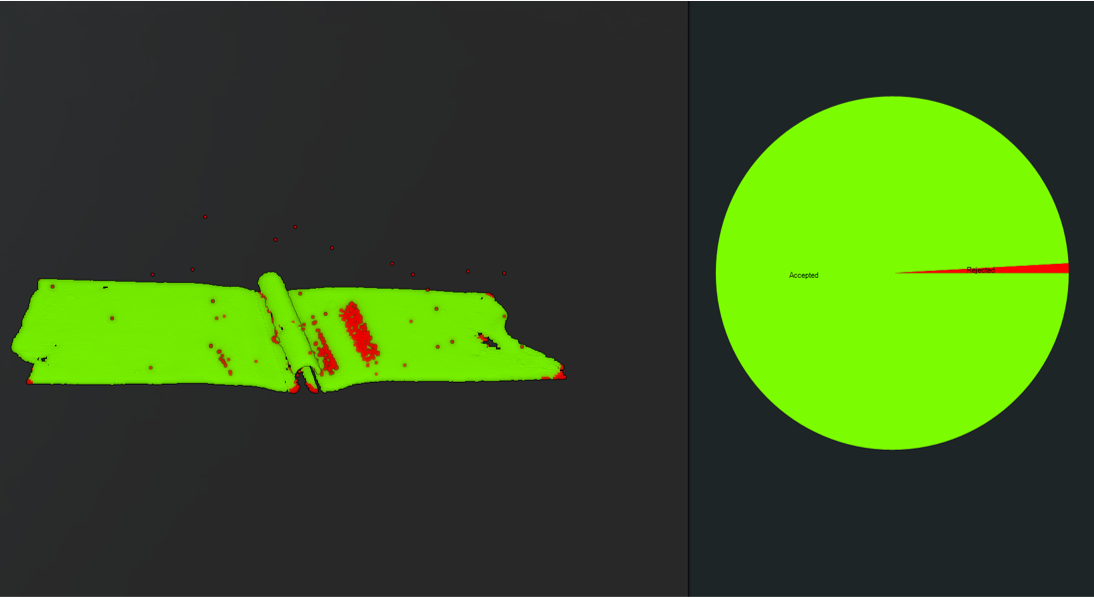
Reject & accept points
You can see which points are being rejected or accepted both on a DTM and in a pie chart to visualise the distribution of accepted and rejected points.
-
Point cloud tools
Create point clouds from sonar and laser systems or from historical XYZ files. Within NaviModel, there are many ways to visualise, edit and optimise point data.
Point cloud features
We can create point clouds from sonar and laser systems or from historical XYZ files. Within NaviModel, there are many ways to visualise, edit and optimise point data.
Import XYZ files
You can easily model historical data in NaviSuite Kuda and use it for example to plan your survey or compare your results with earlier observations. If you have data in a known format, such as generic ASCII XYZ files, these can be imported as DTMs, point clouds, or TIN models.
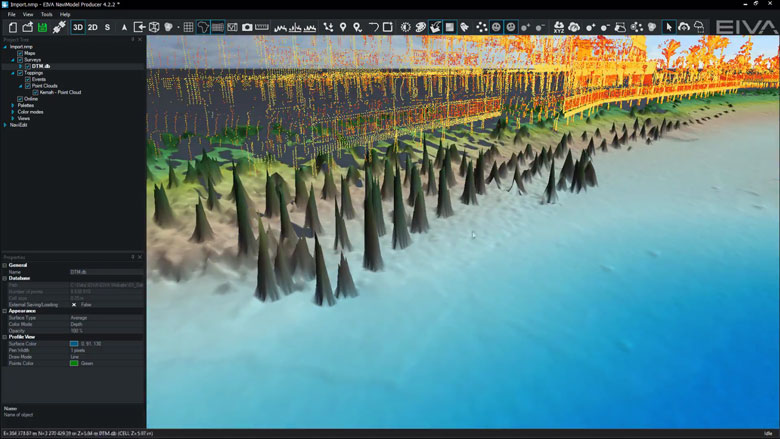
Point clouds with RGB and Intensity
By default, point clouds can be visualised as a solid colour or as a depth palette. However, if source files contain RGB or Intensity values, we can choose to colour the point cloud with this information instead.
EC-3D point cloud cleaning
EC-3D can be used to clean point clouds.
Manual cleaning
A selection window or a polygon can be used to manually clean point clouds.
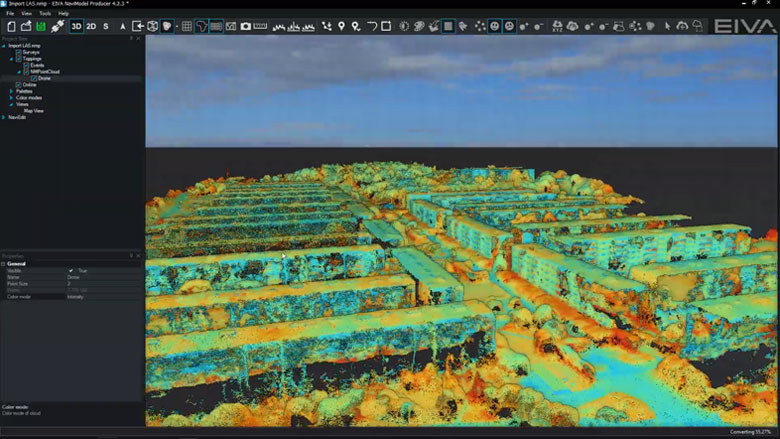
Import LAS files and display as RGB or Intensity
LAS and LAZ files can be imported as DTMs or as point clouds, meaning you can use NaviSuite’s powerful modelling capabilities for validating data in this format. You can also export your model to this format.
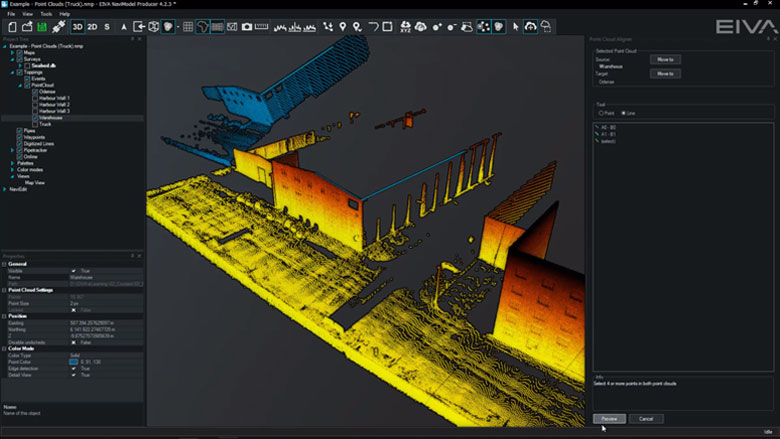
Point Cloud Registration (QuickStitch)
If point clouds are misaligned, we can use Point Cloud Registration to align them. We accomplish this by first digitising common features, and then performing a least-squared adjustment that moves one point cloud to another.
-
DTM tools
In NaviSuite Digital Terrain Models (DTMs) can be generated, manipulated, and edited with the help of various tools.
DTM features
In NaviSuite, Digital Terrain Models (DTMs) can be generated, manipulated, and edited with the help of various tools.
Create DTM surface from points (sonar & laser)
DTM surfaces and Point Clouds can be generated at any time from either sonar or laser data.
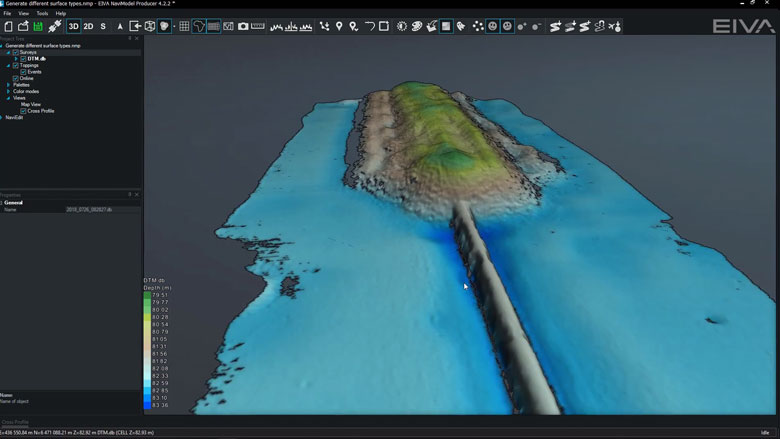
Create different DTM surfaces (mean, max, min, etc) and colour modes
Different surface types are generated upon data import and can be accessed at any time.
Light and Palette settings
DTM light and palette settings can be changed at any time.
Visibility Slider
Visibility slider allows users to compare different DTMs quickly.
This enables comparison over time or between different data processing methods.
Difference models
DTMs can be created from the differences between two other existing models.
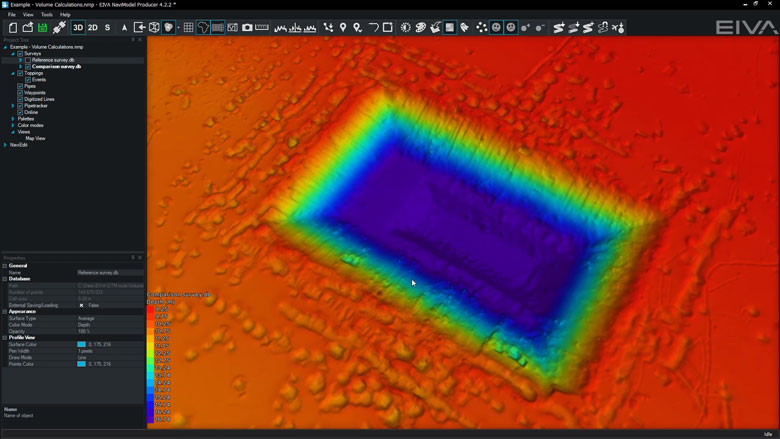
Volume calculation
A volume calculation is the difference between a reference surface and a comparison surface.Surfaces can be from a DTM or a TIN model.Volume calculations can take place between the following models:• DTM vs DTM• TIN vs TIN• DTM vs TIN
Density surface
Density colour mode can be enabled to QC how many points are in each DTM cell.
Custom surface
It is possible to create custom surfaces based upon hard-coded variables or user-configurable equations.
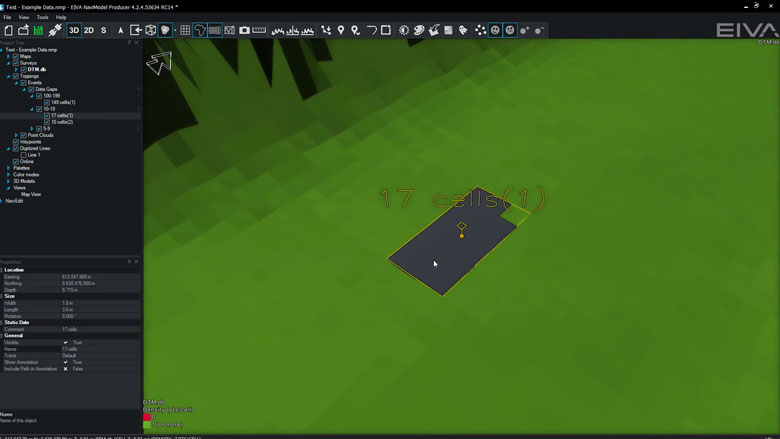
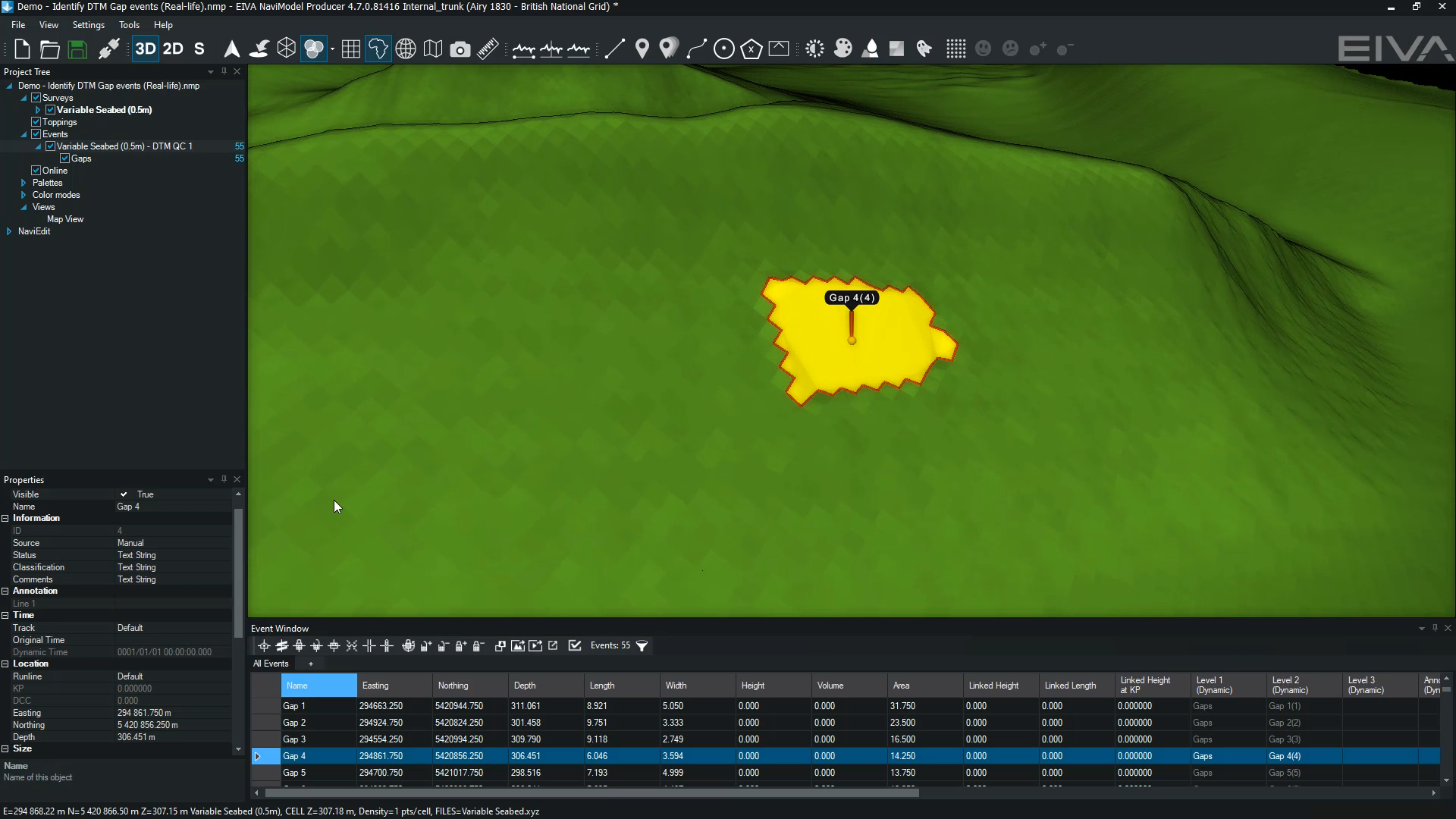
Automatic gap detection
This tool analyses DTMs to identify areas which have no coverage (i.e. contain gaps).
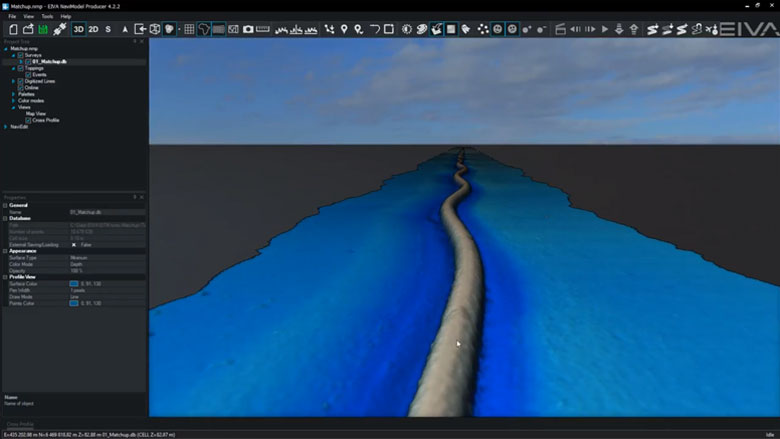
Matchup
Matchup tool can be used to correct for DTM artefacts caused by incorrect ROV XYZ position.
Points are moved based upon differences between two existing lines (source and destination).
Points are moved perpendicular to the destination line.
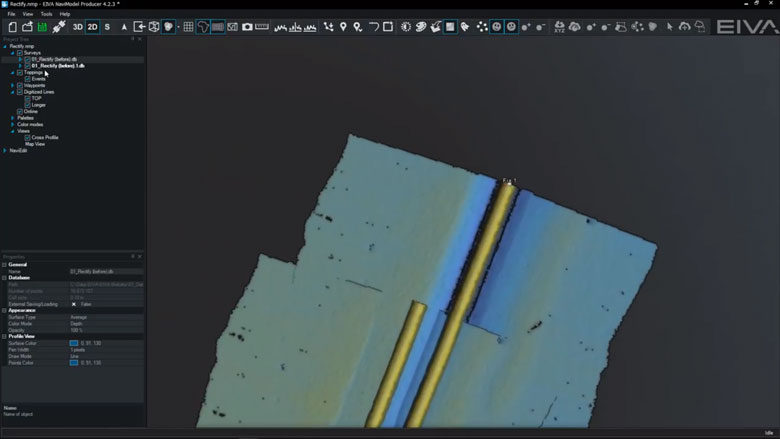
Rectify
Rectify tool can be used to correct for DTM artefacts caused by incorrect ROV XYZ position.
Points are moved based upon differences between two existing lines (source and destination).
Points are moved perpendicular and along length to the destination line.
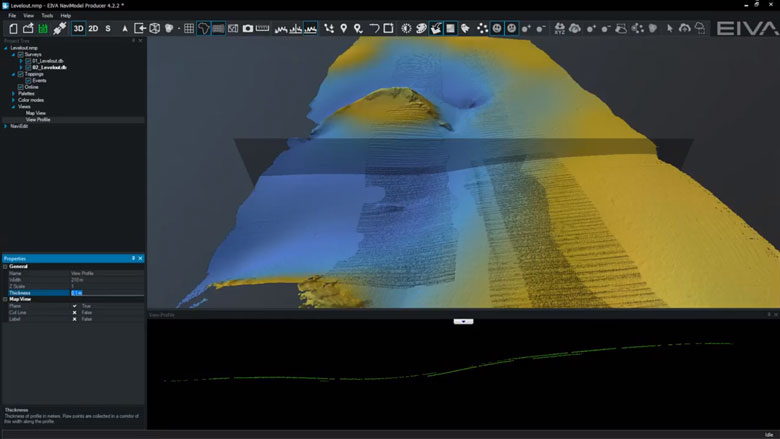
Level out
Level out tool can be used to correct for small depth differences between surveys.
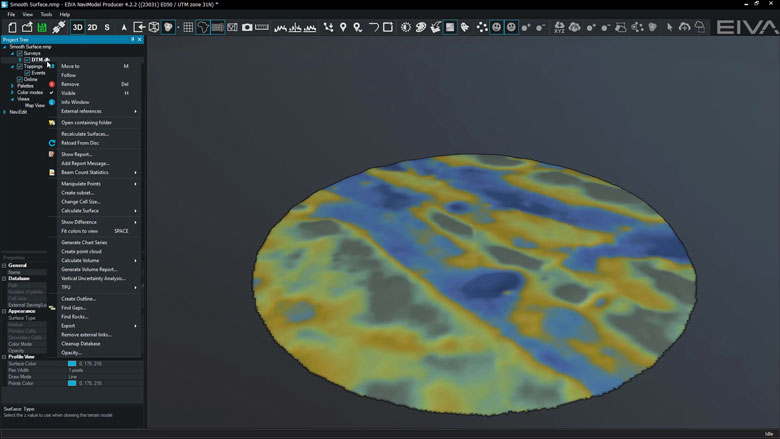
Smooth surface
Smooth surface tool smooths a DTM surface by an absolute distance or by the number of DTM cells.
CUBE
Combined Uncertainty and Bathymetric Estimator (CUBE) tool is available in NaviModel and is implemented alongside our other cleaning approaches.
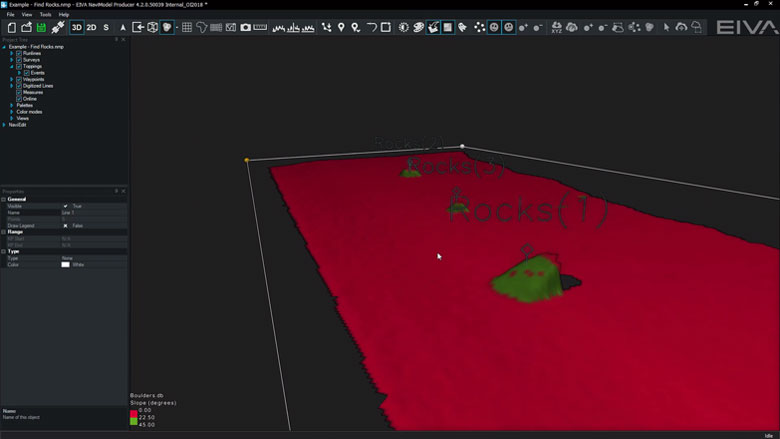
Find Rocks
This tool analyses DTMs to identify rock events.
-
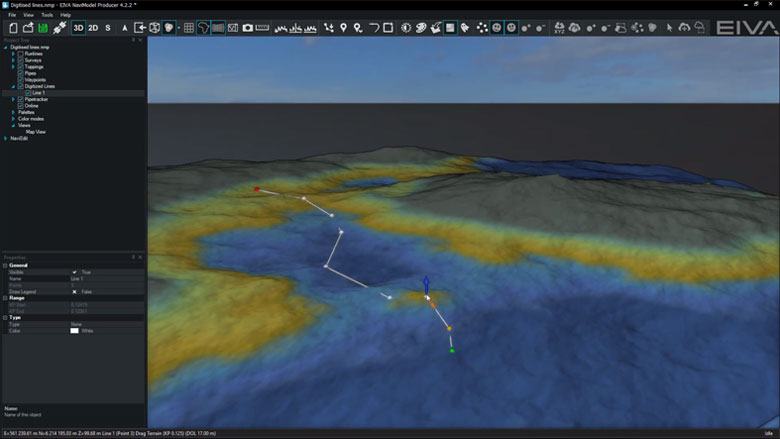
Line and track tools
We have a large range of tools to create, modify, graph and export lines that are digitised within NaviModel. Digitised lines are multipurpose and are used both online and offline. Some examples of digitised line usage include controlling pipelines and seabed marker positions, creating boundaries, engineering designs and runlines.
Line and track tool features
We have a large range of tools to create, modify, graph and export lines that are digitised within NaviModel. Digitised lines are multipurpose and are used both online and offline.
Modify lines
Lines can be modified in many different ways.
Line smooth
If required, the entire length of the line can be smoothed in XYZ.
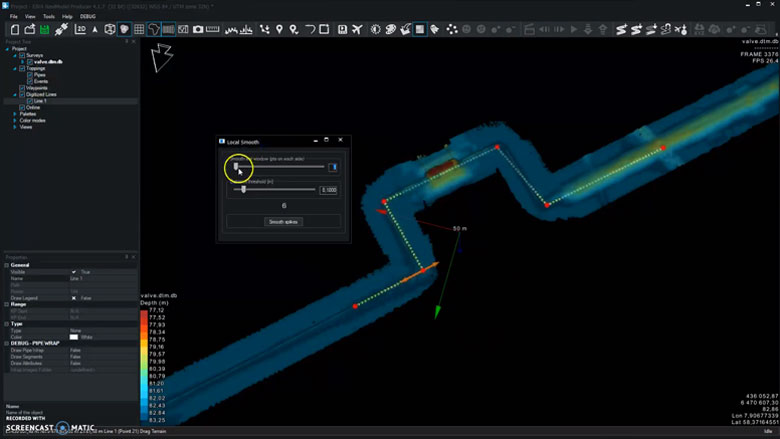
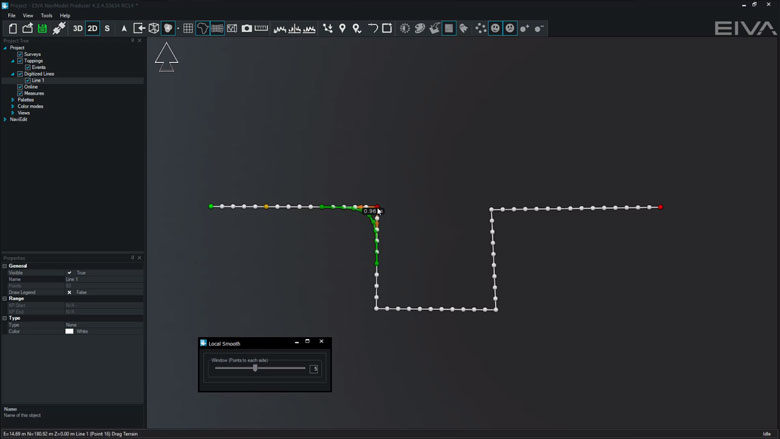
Local smooth
Local smooth tool allows you to concentrate on small line sections that require remedial action.
Convert waypoints to lines
Waypoints can be converted to lines via the ASCii Importer.
Compare lines
Whilst we can always compare lines visually in the Map View window, sometimes it is better to create graphs for comparison.
-
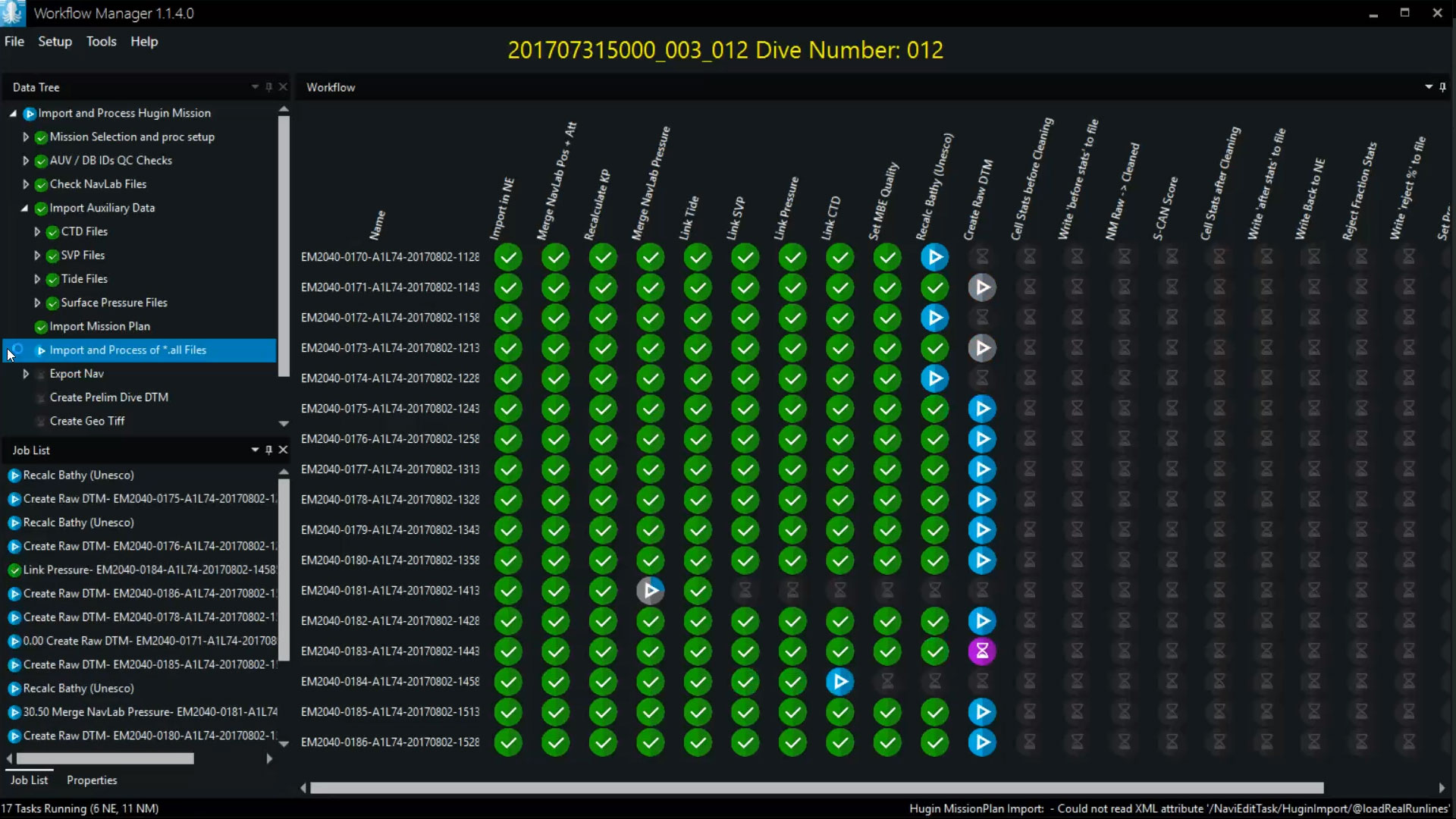
Automatic data processing tool
Save time on data processing by automating your workflow – using NaviSuite Workflow Manager, designed to enable a previously unseen degree of automatic data processing of massive amounts of subsea sensor data.
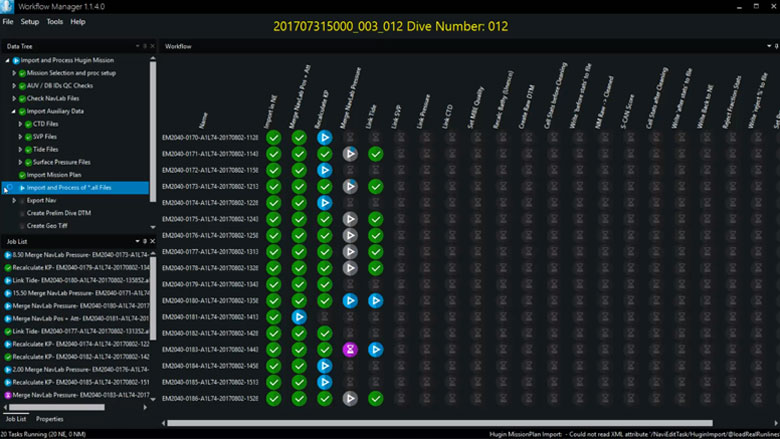
Automatic processing features
The NaviSuite Workflow Manager tool is designed to enable a previously unseen degree of automatic data processing of massive amounts of subsea sensor data.
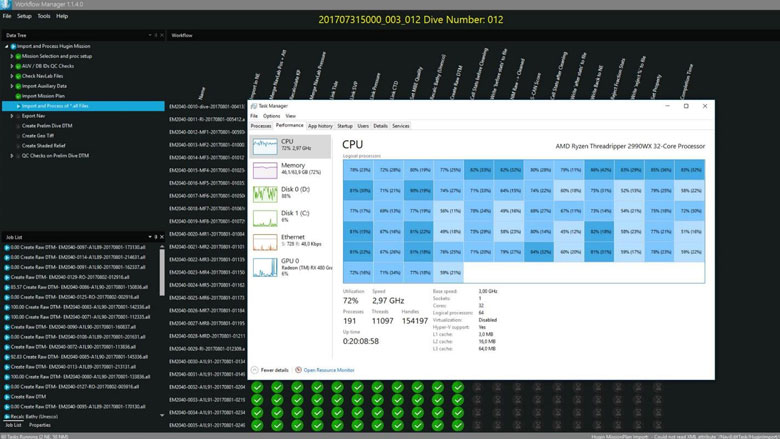
AUV processing workflow
The first version of the Workflow Manager utilises NaviEdit and NaviModel for a traditional survey data set processing of data from AUV dive. As soon as the data is available, it is automatically loaded into the flow and processed by cleaning data, merging reprocessed AUV track, building DTMs and making sanity checks. This is typically done using the Server version.
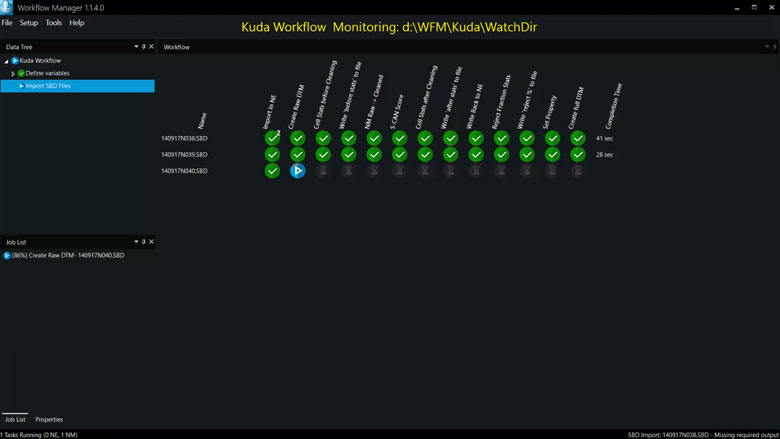
NaviSuite Kuda processing workflow
The Workflow Manager desktop version is very well suited for NaviSuite Kuda operations where each file will be processed right after recording, thus enabling reporting and quality control as you go. The Desktop version runs one task at the time – but it is more than fast enough to cope with survey speed.
Execute multiple parallel NaviEdit, NaviModel and 3rd party commands
The more CPU (cores), memory and disk speed you have – the better you utilise the workflow engine. The optimal solution is running a bit fewer processes than the number of cores.
-
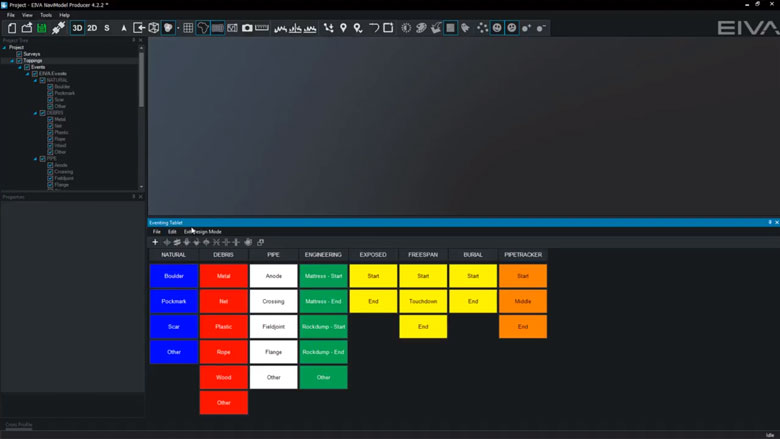
Eventing
The many eventing features include auto-calculation of event types and an easy-to-use event tablet view.
Eventing features
The many eventing features include auto-calculation of event types and an easy-to-use event tablet view.
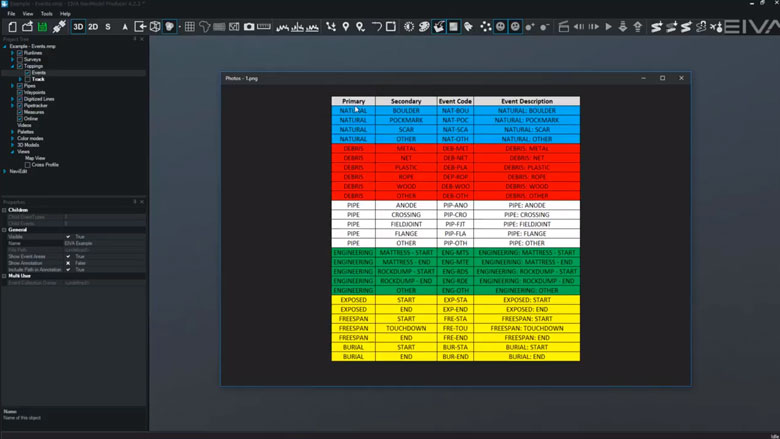
Configurable event types, hierarchy, and properties
Client and company specific event collections can be tailored to the activity undertaken.
During EIVA Days Denmark 2018, we presented a major expansion to the functionality of camera based scanning.
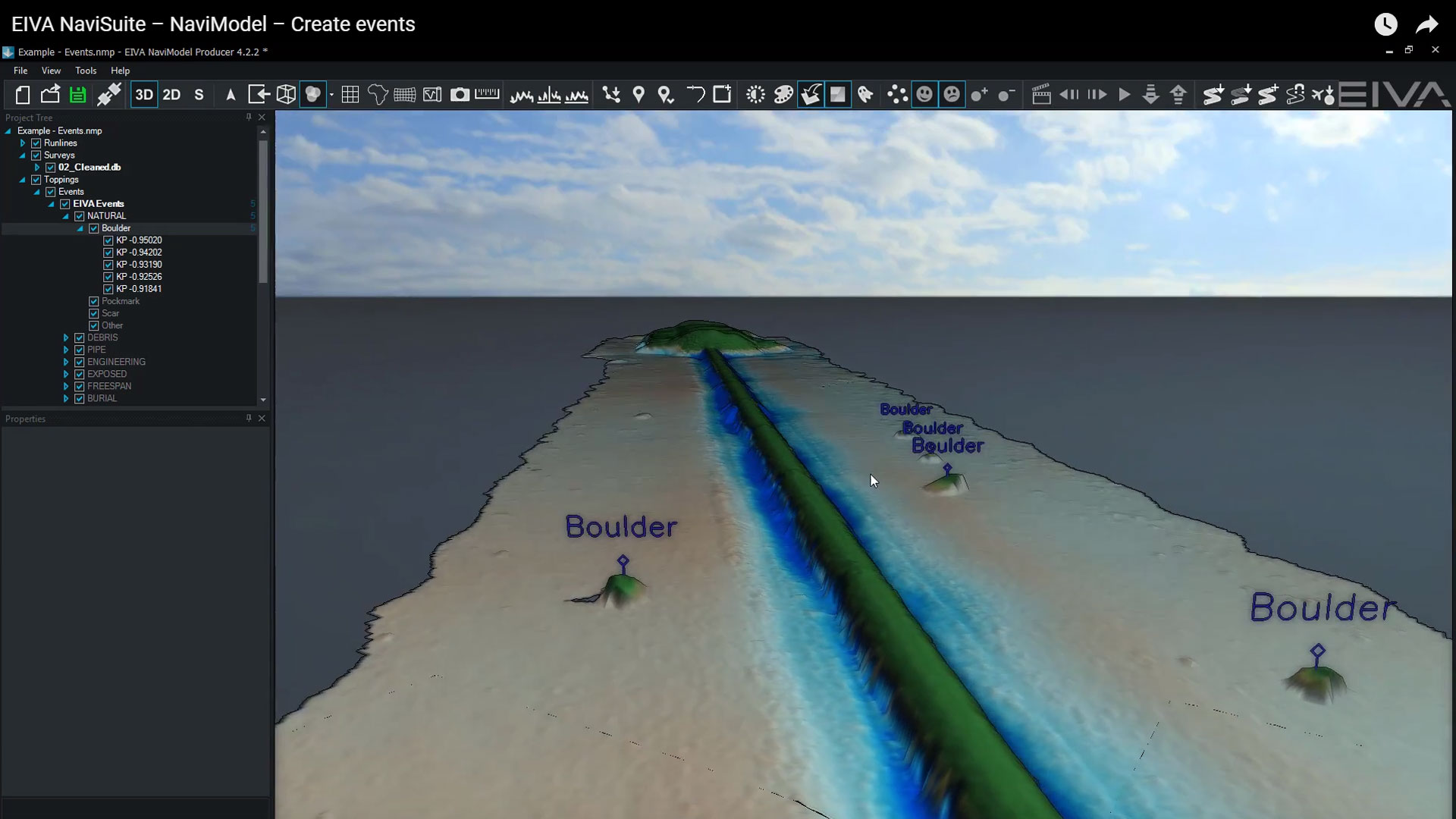
Create events
Events can be created quickly and are automatically placed onto a DTM.
Tablet for fast event creation
Using the eventing tablet view allows for quicker event creation. With the eventing tablet, you can quickly add all events, or customise which events to add with just a few steps.
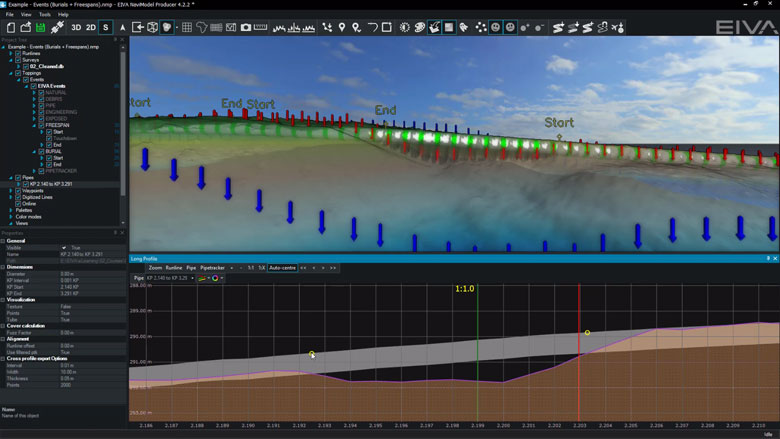
Create freespan and burial events
Pipe and seabed markers are used to create freespan and burial events.
This means that events and seabed markers always tie-in.
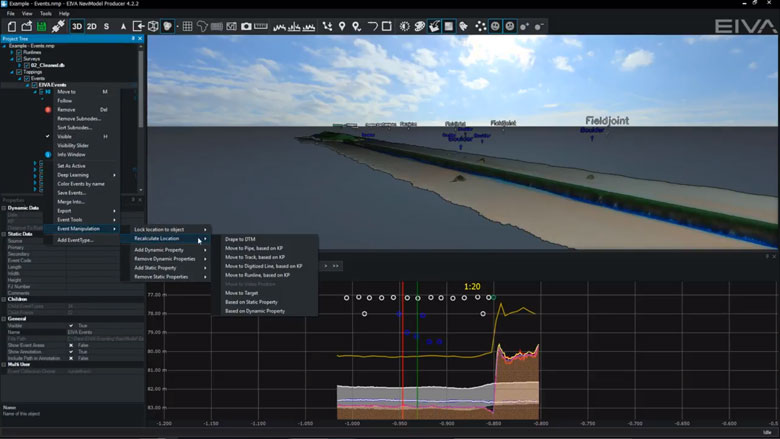
Recalculate events
Events can be recalculated at any time.
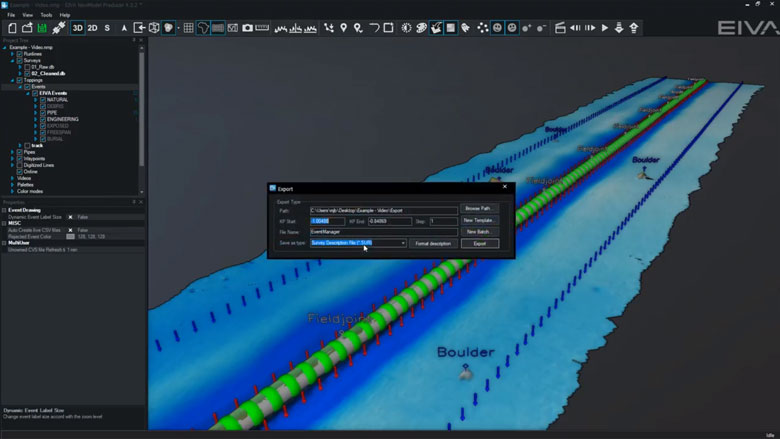
Export events
User configurable templates can be created to export events in the format required.
Export nearest image and videos
Images and videos can be exported for each event or for selected events.
Create pipetracker gap events
Pipetracker gap events are created from continuous sections of rejected pipetracker data.
You can also automatically identify and generate DTM gap events for quality control.
-
Videos and image display tools
Combine data sources in the intuitive interface of NaviModel, including videos and still images that contain time stamps.
Videos and images features
Video and still images that contain time stamps can be combined with other data sources in NaviModel.
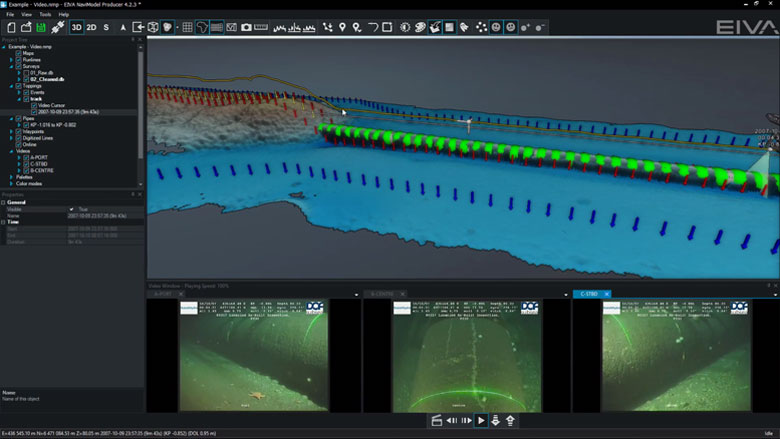
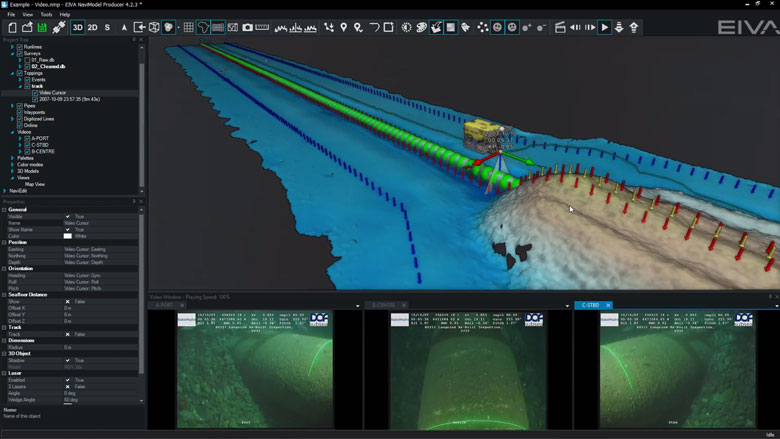
Play and control video
Digital video acquired in external systems can be played and controlled inside NaviModel.
Synchronise video with track
In NaviModel the track contains the date and time and must be synchronised with the video time to enable videos to play.
Normally the video time and track time are recorded in the same time zone. However sometimes this is not the case and we need the option to change the video / track time so that video will play.
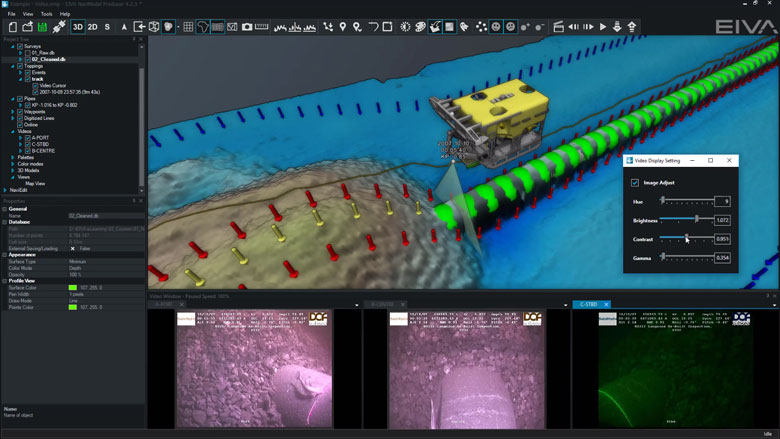
Adjust video hue, brightness, contrast and gamma levels
Hue, brightness, contrast and gamma levels can be adjusted to improve badly lit videos.

Product comparison
Related products
-
NaviSuite Kuda Pro
Unmatched software with deep feature list for shallow water data acquisition – Supports all relevant instruments – Unlimited remote displays – Tracking of a subsea object.
€ 84.00/day€ 5,200.00/year€ 15,600.00/permanent -
NaviSuite Kuda Core
Unmatched software with deep feature list for shallow water data acquisition – Entry-level variant – Supports multi-beam echo sounders, lasers and cameras.
€ 42.00/day€ 2,600.00/year€ 7,800.00/permanent -
NaviSuite Kuda Core + Processing
Unmatched software with deep feature list for shallow water data acquisition and processing – Entry-level variant – Supports multi-beam echo sounders, lasers and cameras.
€ 74.00/day€ 4,550.00/year€ 13,650.00/permanent -
Workflow Manager – Server
Configurable workflow process automation tool allowing for automation of the small steps you normally go through when processing subsea data.
€ 13,650.00/year -
NaviModel Analyser
Basic processing, visualisation and analysis of data in 2D, 3D and 4D.
€ 26.00/day€ 1,592.00/year€ 4,775.00/permanent -
NaviSuite Nardoa
Advanced 3D pipeline & cable route inspection software for data acquisition and processing.
€ 291.00/day€ 17,983.00/year€ 53,950.00/permanent