Add 3D visual clarity to UXO detection with a multi‑sensor platform for buried object imaging
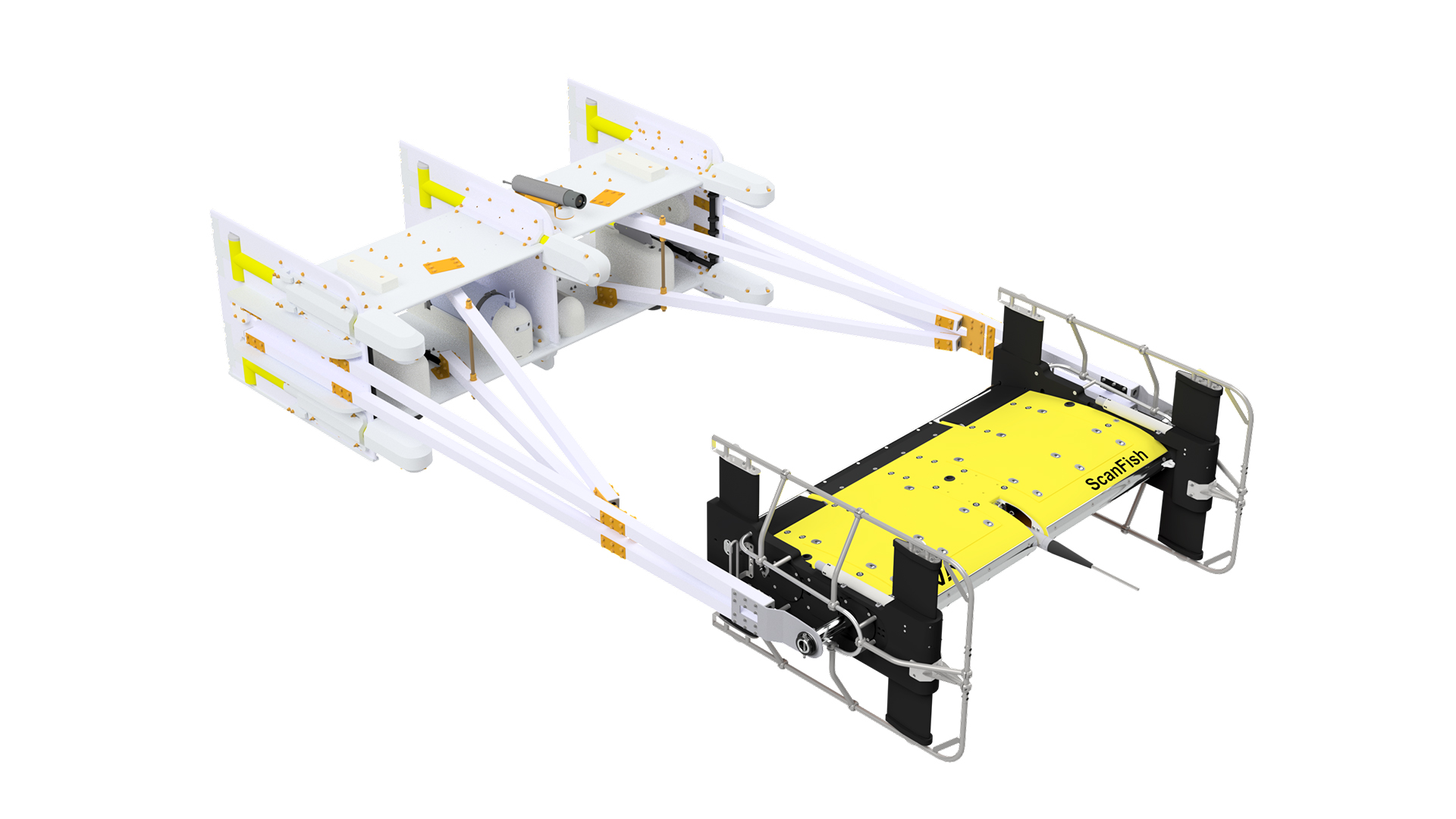
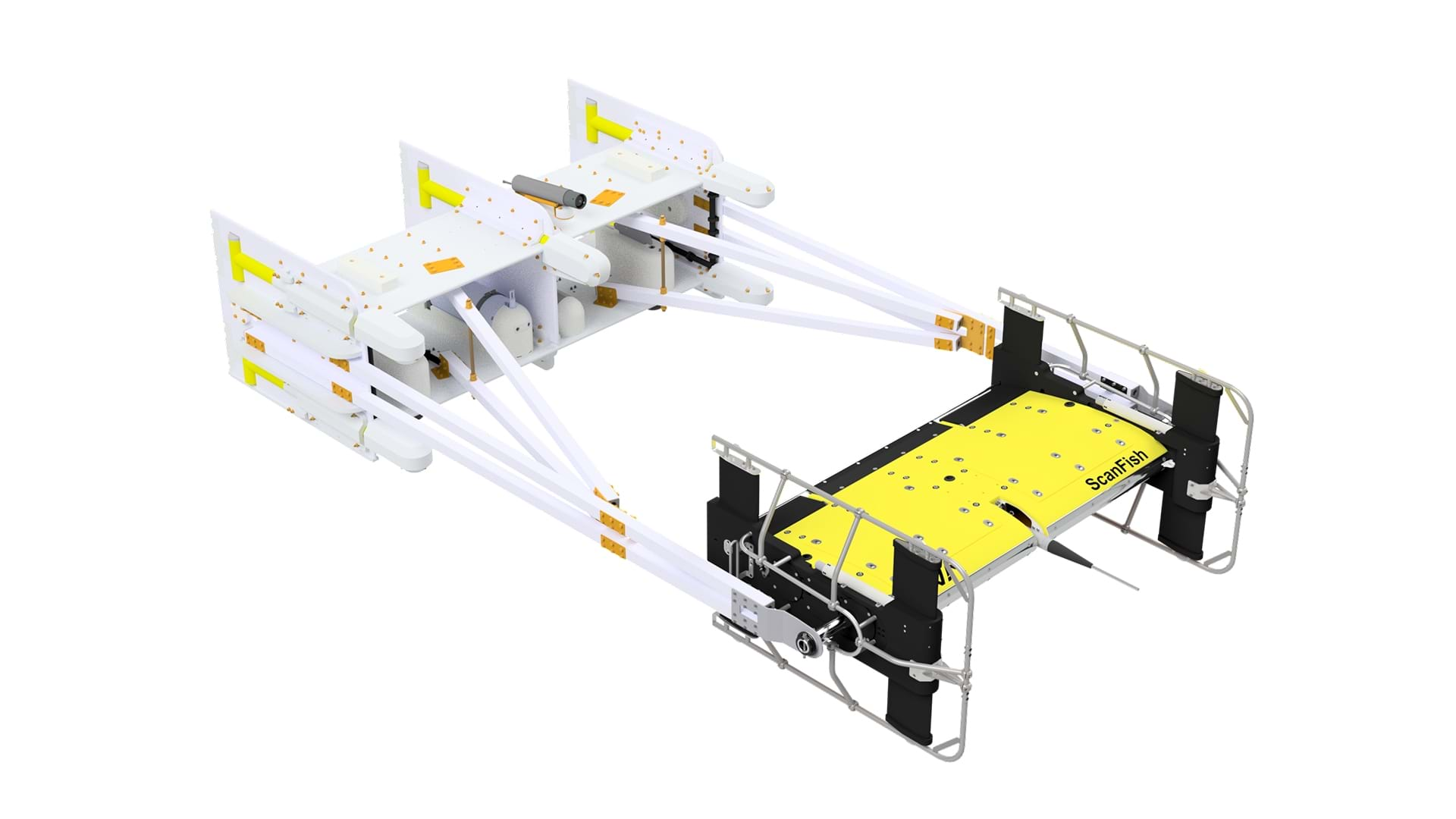
The Sub-bottom Imaging Frame extends the capabilities of the ScanFish Katria – EIVA’s intelligent wide-sweep ROTV (remotely operated towed vehicle) designed for high-efficiency magnetometer surveys – by bringing together high‑resolution 3D sub‑bottom imaging and advanced magnetometer sensing in a single, stable towed platform.
Designed for UXO surveys, cable and pipeline inspection, and buried object detection, the frame adds a crucial visual dimension to magnetic data – helping survey teams detect, classify and validate targets with far greater confidence.
A complete solution for modern UXO and subsea surveys
The sub‑bottom imaging frame delivers:
- Fewer false positives, thanks to combined sensor modalities
- High‑quality data from a stable towed platform
- Clear, intuitive 3D visuals to complement magnetometer detection
- A safe and efficient workflow, from acquisition to final interpretation
This makes it an ideal platform for UXO surveys, route clearance, archaeological studies, cable/pipeline inspection, and any project requiring high confidence in buried object detection
A multi‑sensor frame for complete subsurface awareness
The frame supports both 3D sub-bottom imaging sensors, such as the EdgeTech eBOSS, and high‑performance magnetometers, including OFG HyperMags, Geometrics G‑882, MagElement, and Marine Magnetics Synapse.
By combining these complementary sensors, users gain:
- Magnetic and electric anomaly detection of ferrous and low-ferrous objects
- 3D visualisation of buried objects, sediments and geological layers
- Improved target identification with fewer false positives
- Improved target ranking and discrimination using magnetic, elctric and acoustic object responses
- A unified dataset for efficient interpretation in NaviModel
This approach transforms traditional magnetometer‑only surveys into a richer, more interpretable dataset – giving operators both the detection range of magnetics and the contextual clarity of 3D imaging.
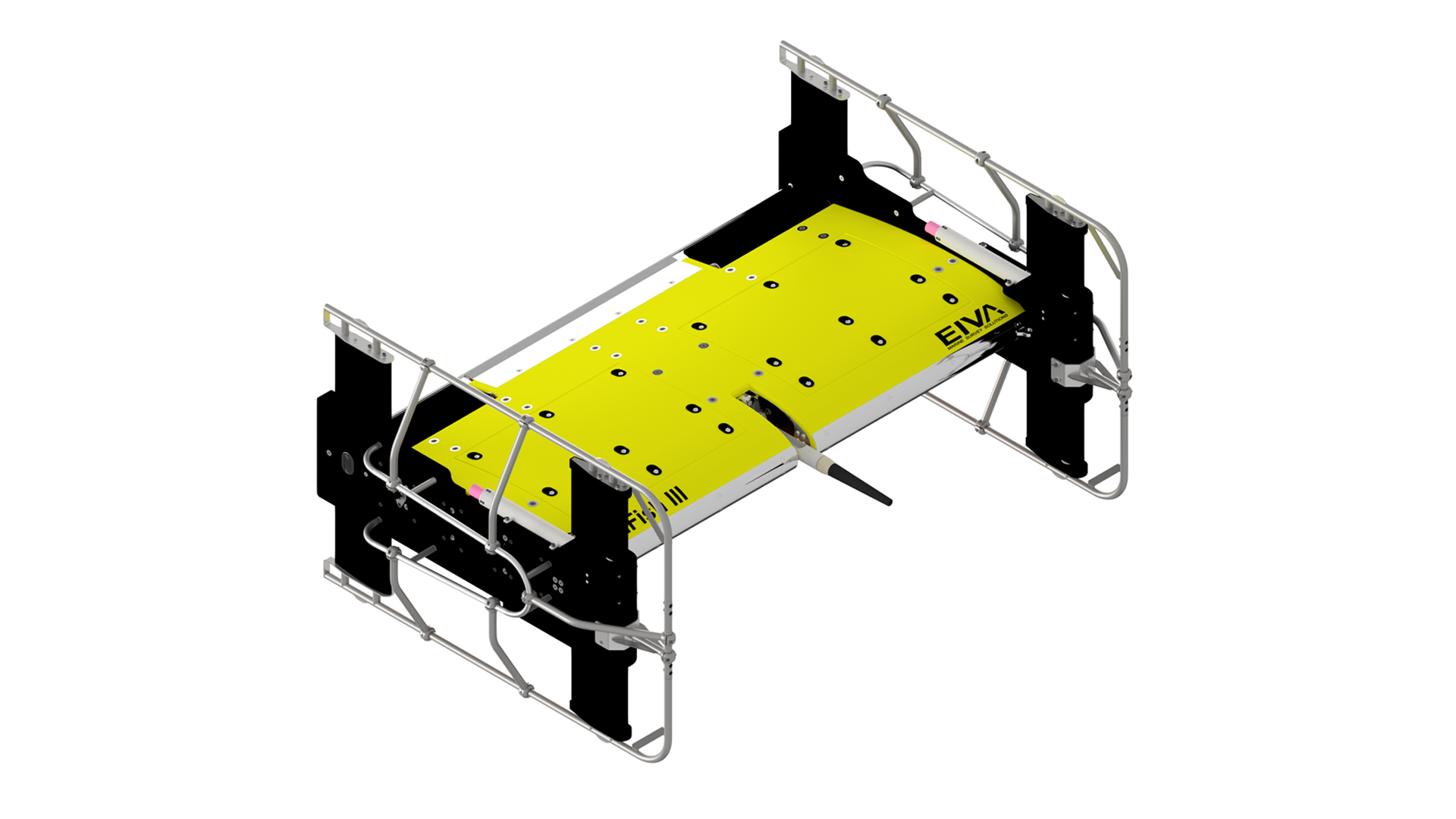
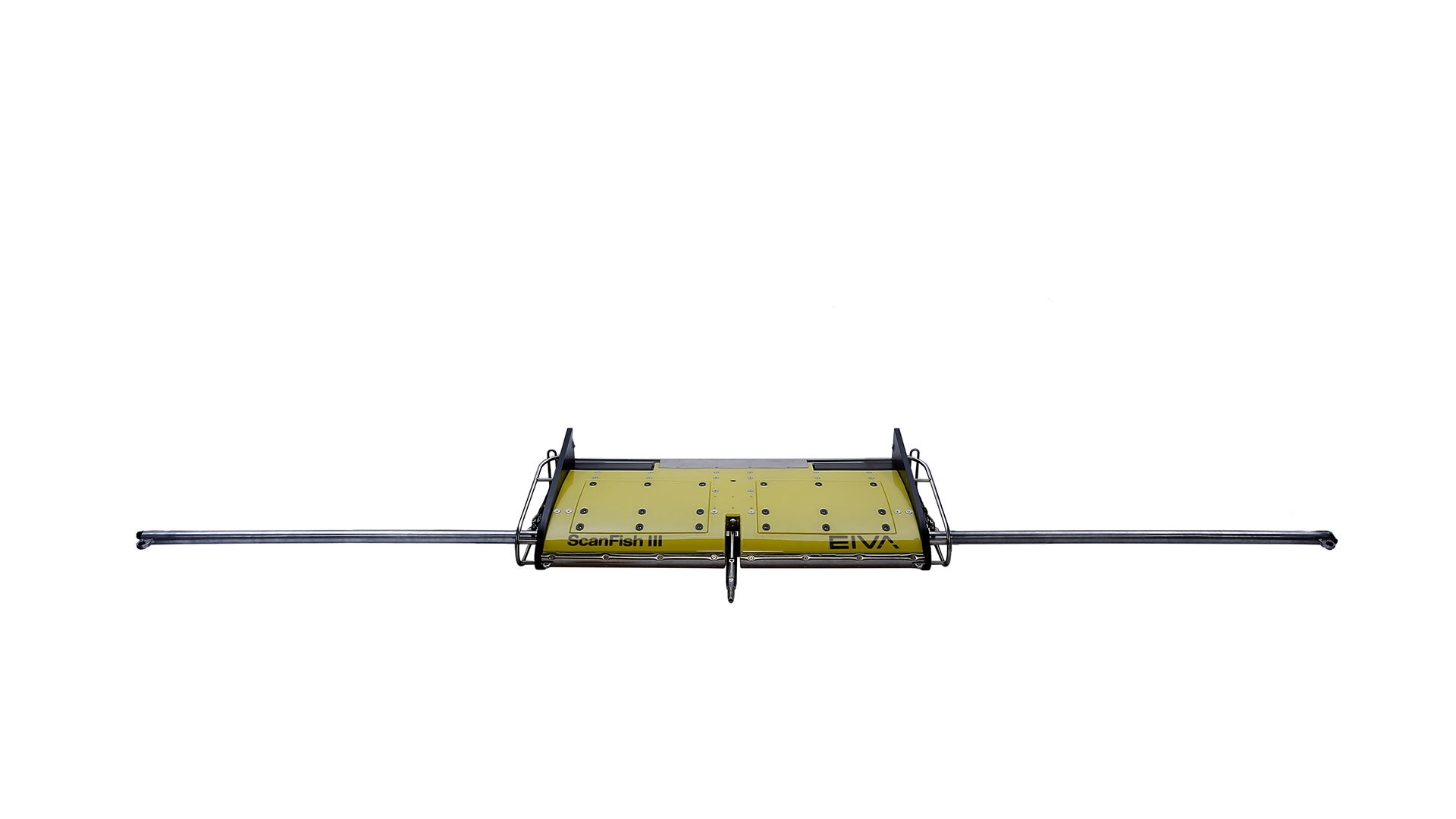
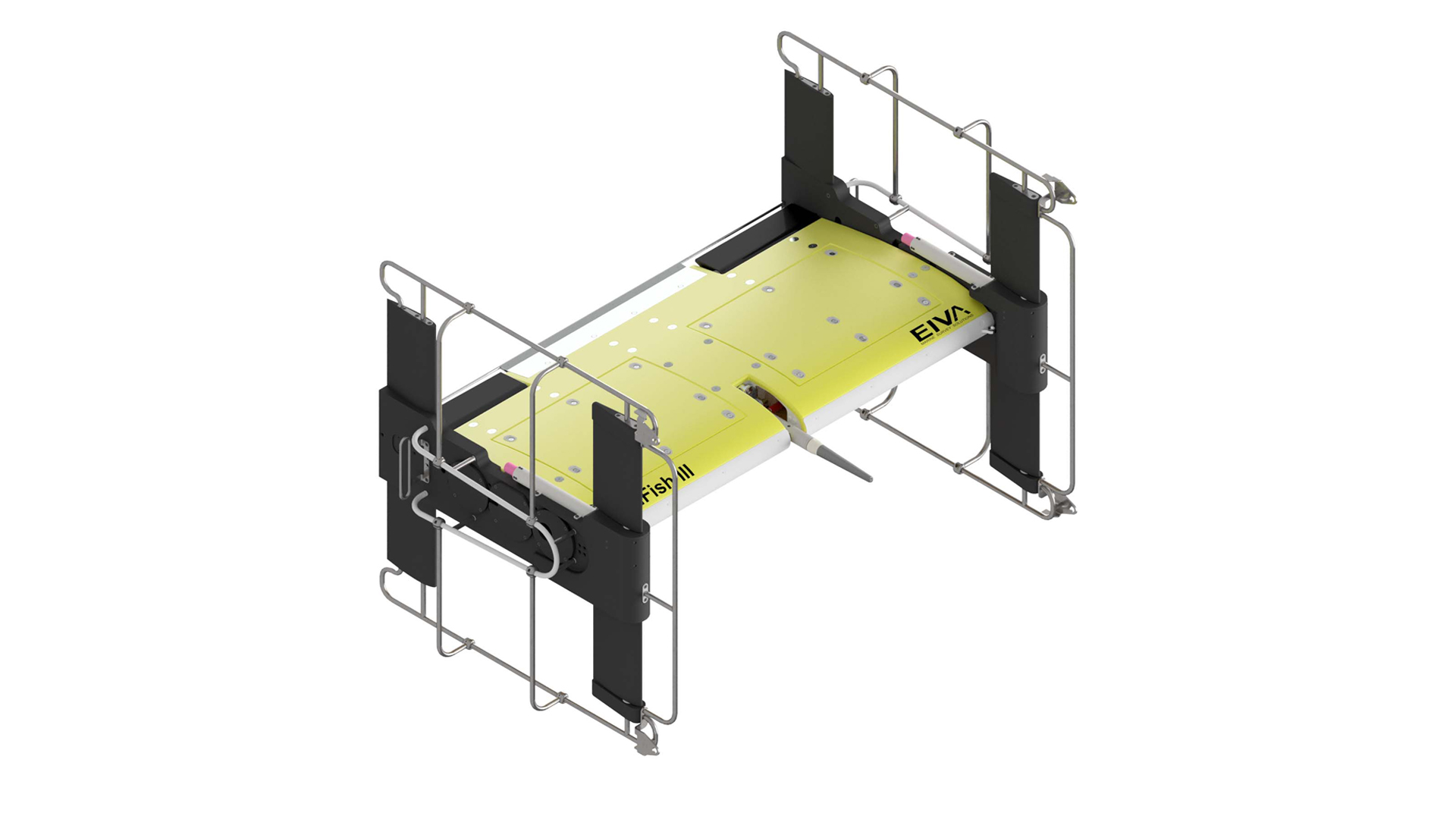
Built for ScanFish Katria – engineered for stability
The frame is based on EIVA’s proven ROTV magnetometer frame design, offering:
- Exceptional stability, minimising roll and pitch for high‑quality sensor data
- A robust protective structure for sensors and electronics
- Streamlined integration with the ScanFish Katria and ScanFish Flight autopilot
- Efficient deployment and recovery, even with multiple vehicles in the water
The result is a reliable platform capable of maintaining optimal survey geometry – even at challenging towing speeds or when navigating complex seabed terrain.
3D sub‑bottom imaging – see what lies beneath
When equipped with a sub‑bottom imaging sensor such as the EdgeTech eBOSS, the frame delivers:
- High‑resolution 3D imaging
- Penetration depths of 3–10 m (depending on sediment conditions)
- Wide‑swath coverage for efficient survey lines
- Voxel resolution down to 5 cm, enabling precise target classification
This makes buried UXO, debris, boulders, and infrastructure features visible in a way that 2D systems cannot achieve.
Magnetometer support – sensitive detection of ferrous objects
The sub-bottom imaging frame supports multiple leading magnetometer systems:
- OFG HyperMags – self‑compensating, 3‑axis, high‑sampling (2400 Hz)
- Geometrics G‑882 + MagElement – high‑sensitivity cesium‑vapour system, low noise (<0.004 nT/√Hz), up to 20 Hz sampling
- Marine Magnetics Synapse – ultralight rubidium scalar magnetometer, 0.01 nT sensitivity, up to 20 Hz sampling
These sensors provide highly sensitive detection of ferrous anomalies, and when combined with 3D imaging data, provide a clear pathway from detection → verification → classification.
High‑end navigation for precise target positioning
The platform supports INS and USBL navigation, including:
This ensures accurate geo‑referencing of buried targets – critical for UXO clearance, cable installation, route planning and reporting.
Operational specifications
ScanFish Katria with Sub‑bottom Imaging Frame:
- Depth rating: Max 400 m
- Towing speed: 3–8 kt
- Dive/climb speed: 0–2 m/s
- Anti‑collision climb: 3 m/s (45° at 6 kt)
- Vertical position precision: 0.2 m
- Weight: 99 kg in water / 447 kg in air
- Drag: 1.2 kN at 4 kt
From acquisition to visualisation
Pairing the Sub-bottom Imaging Frame with EIVA NaviSuite gives survey teams a single integrated environment that manages the full subsea workflow – from navigation and data acquisition through processing, 3D/4D modelling and final reporting. Its unified tools for visualization, modelling and analysis streamline work with complex, multi-sensor datasets and ensure high-quality outputs throughout the project lifecycle:
- NaviModel allows operators to inspect, visualise and interpret both magnetic anomalies and sub‑bottom imaging outputs.
- 3D and 2D data displaysmake it easier to understand object shape, orientation and burial depth.
- Ability to add gates that remove unwanted high intensity data from displays to ensure objects of interest are not covered by irrelevant objects.
- This reduces uncertainty, improves decision‑making and accelerates the path to actionable results.
Please note: The ScanFish pictured in the image is a separate product, and therefore is not included in the price. This product is subject to export control, which may delay/hinder delivery to some countries, and may be subject to restrictions if re-exported.