To use this site, please enable javascript
To use this site, please enable javascript
Author: EIVA CEO Jeppe Nielsen
We see a clear tendency among the EIVA NaviSuite users: The concept of big data is making its way into the maritime survey and construction industry.
This includes very large point clouds being in play when handling data throughout the acquisition and processing workflow. EIVA of course wishes to make sure that if our users meet limitations in connection to this, then these are not caused by the NaviSuite software.
Consequently, the EIVA software development team has been working in the engine room of our point cloud handling software to ensure even stronger high-performance processing that matches the requirements of our big data users.
The result? NaviModel and NaviPac Helmsman’s Display can now handle infinitely large point clouds – without reducing the performance level.
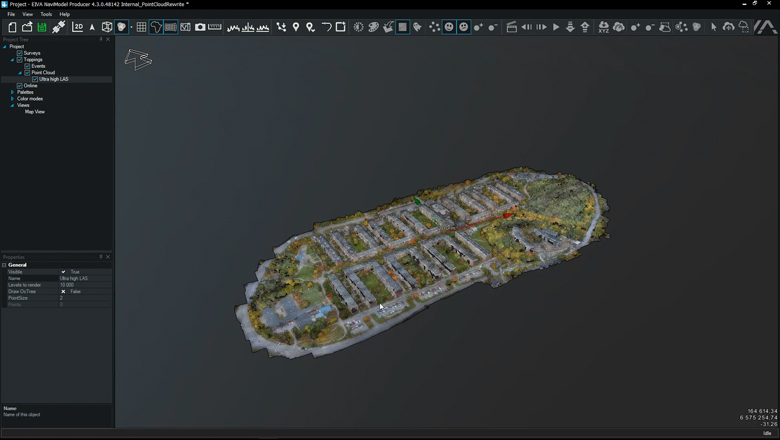
A colour point cloud from an airborne LiDAR scan in NaviModel – consisting of a modest 1 billion points
Previous versions of the NaviSuite products would load the entire point cloud into the graphics card. Eventually, you would run out of either graphics power or graphics memory and would have to split the point cloud into several smaller groups. Although most customers have never hit this limit, since the limit was quite high (and much higher than our competitors’), we decided to get rid of the limit altogether.
We did this by applying the same principle to our handling of point clouds as the one behind our DTM (digital terrain model). That is: ‘There is no need to draw points that are not visible on the screen’. For example, on a Full HD (1920x1080) monitor, you don’t need to draw more than ~2 million points – anything more than that is a waste of computing power, as the monitor is not able to display more.
So, high performance can be ensured through careful organisation of the data. In other words, by ensuring that the amount of data given to the graphics card to draw at any time is as small as possible.
We are using an octree to ensure optimal data structure on the disk. Other features include:
As shown in the video, the performance is high, even on medium spec computers. You will experience smooth navigation, panning and zooming without any visible decline in performance.
The unlimited point cloud handling feature will find its way into NaviModel and NaviPac Helmsman’s Display later this year. If you want to learn more about it, feel free to contact us.
Should you have some very large point clouds, we would be very interested in seeing them and trying them out in NaviModel – the more (and larger), the merrier.