To use this site, please enable javascript
To use this site, please enable javascript
The NaviModel software is a NaviSuite product and allows subsea and above-water survey professionals to work with high-performance digital terrain models (DTMs) in 2D, 3D and 4D (comparison over time).
With the upcoming release of NaviModel 4.2, the software will include a new set of functionalities for working with error budgets and uncertainties of the sensor spread. These errors / uncertainties are typically called TPU (Total Propagated Uncertainty).
In the following piece, we’ll dive into the theory behind TPU, as well how it is applied in NaviModel.
The new versions of NaviModel be released prior to EIVA Days Denmark and EIVA Day Scotland in September so, naturally, TPU is also on the agenda for these days.
When doing hydrographic surveys, you are of course interested in the precision and accuracy of the survey – or, in other words, how accurate you can expect the surveyed seabed to be, compared to reality. Some key terms for this discipline:
Together, these constitute the TPU (Total Propagated Uncertainty), which sometimes is also called TPE (Total Propagated Error).
One approach to establishing survey accuracy is to verify the precision of a given survey vessel, in practice using a known reference target area based on real survey data. This method, called a posteriori (as it is based on gathered data), is the preferred method of many survey specialists. NaviModel has supported this method with the Vertical Uncertainty Analysis tool for many years. This can be used for both International Hydrographic Organization (IHO) SP-44 and USACE (U.S. Army Corps of Engineers) specifications.
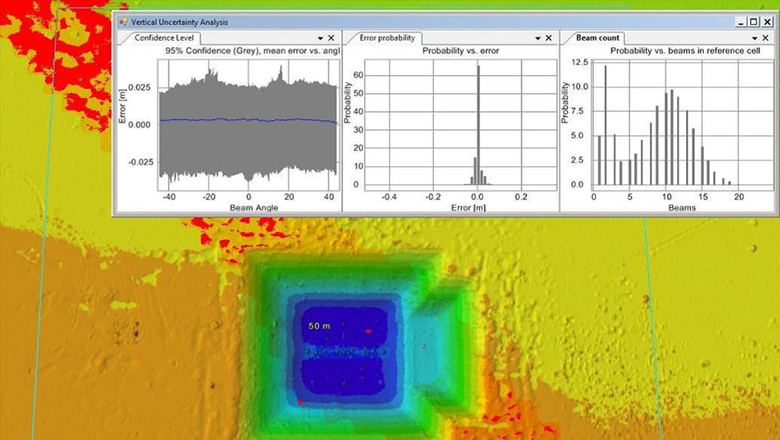
Vertical Uncertainty Analysis (available in NaviModel version 3 and later releases)
The more theoretical approach covers:
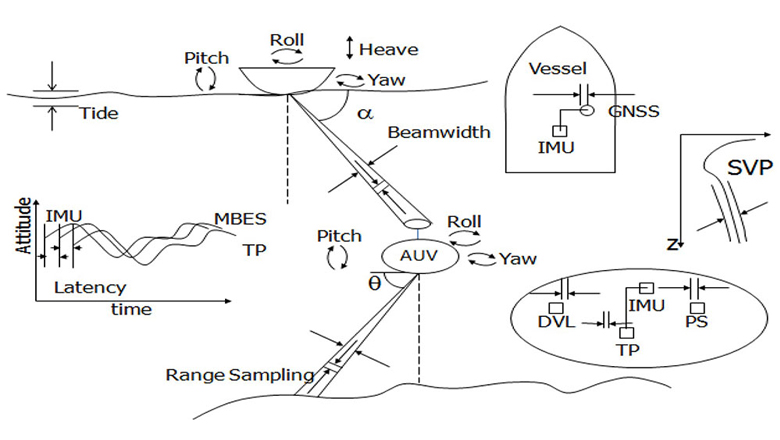
Elements of the propagated error/uncertainty calculation
With NaviModel 4.2, we'll implement two new approaches that focus on planning and estimating the TPU:
Planning: This theoretical approach carries out a TPU calculation, used prior to a survey for overall error budget estimation based on estimated depth, and therefore is used to check (for example) which parts of the sonar data fall within customer requirements.
Real estimation: This approach calculates the TPU on all sonar soundings after the data is acquired. In others words, the uncertainty estimate is available for each ping.
Let’s look at the two features in more detail:
When estimating the precision/uncertainty of a specific sensor setup, a number of tools are available. With these tools all known parameters for the individual sensors as well as formulas for the sensor internals such as ray bending, travel times etc can be manipulated to model the sensor uncertainty as accurately as possible. The uncertainty of multi-beam echo sounders (MBEs) is especially tricky to define – and is sometimes kept a bit of a secret by the manufacturers. NaviModel of course offers a standard equation based on pulse length, travel time, frequency, etc, all of which can be optimised by adding extra information into the user-defined equations.
NaviModel links to the NaviEdit database (the NaviSuite product for survey data editing) and uses the entire sensor configuration, the C-O and the latency, and stores user-defined sensor uncertainty for future use together with the data.
A number of graph views are available, making it very easy to see if a certain sensor configuration will meet customer specifications. The survey uncertainty level can be compared with IHO levels or self-defined criteria.
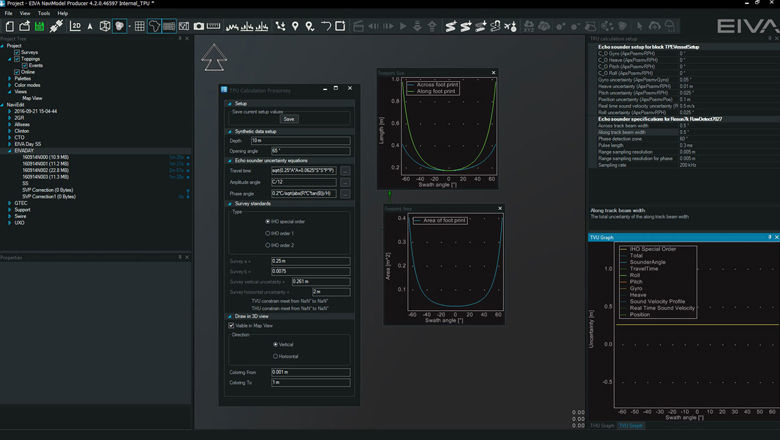
TPU calculation based on a Reson 7K survey setup
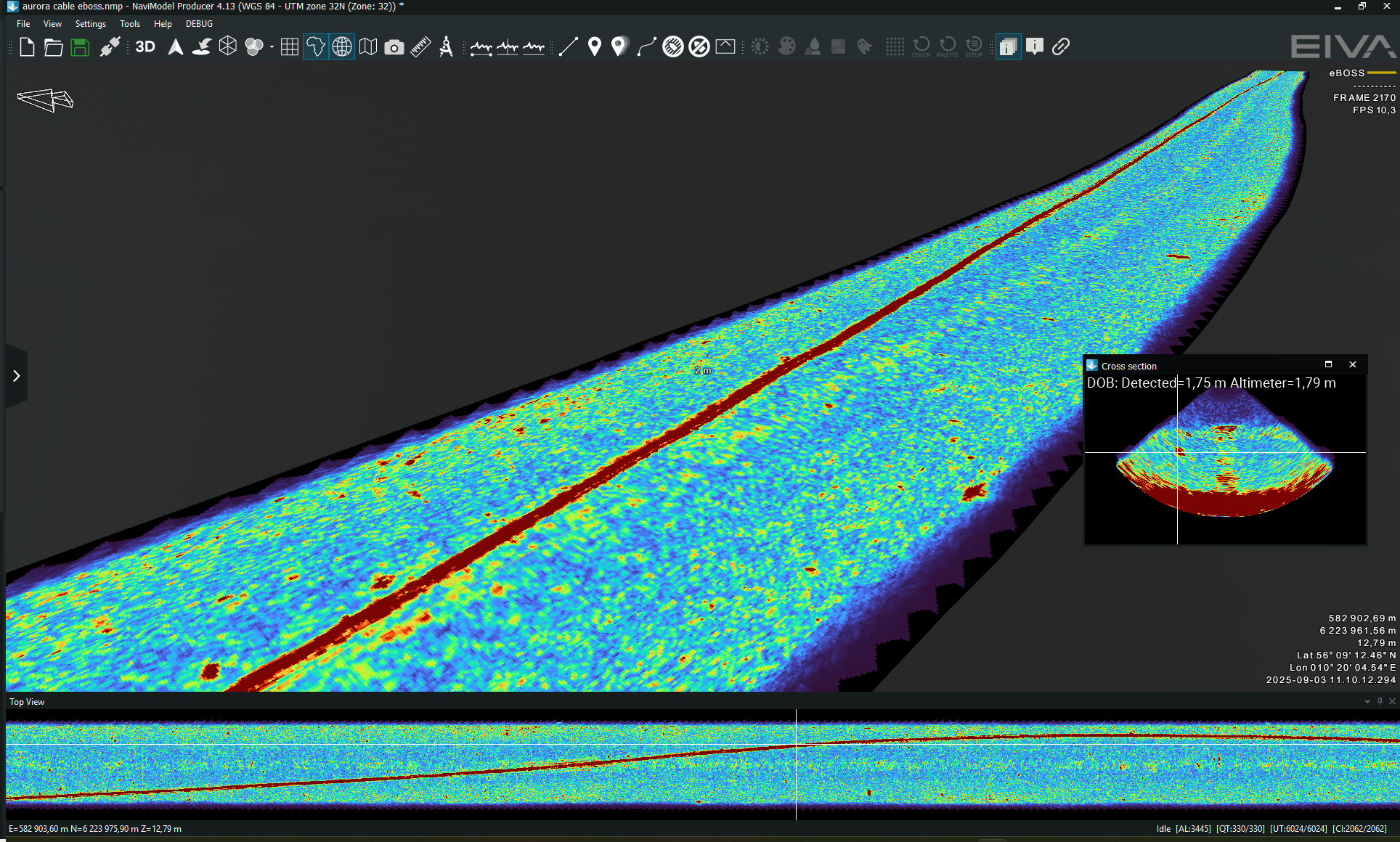
The sensor uncertainty parameters that are used during planning are also used to calculate the uncertainty on all pings in real time during acquisition. The result is available as a NaviModel colour mode. That is, the values can be used to colour the DTM based on the uncertainty level of the data.
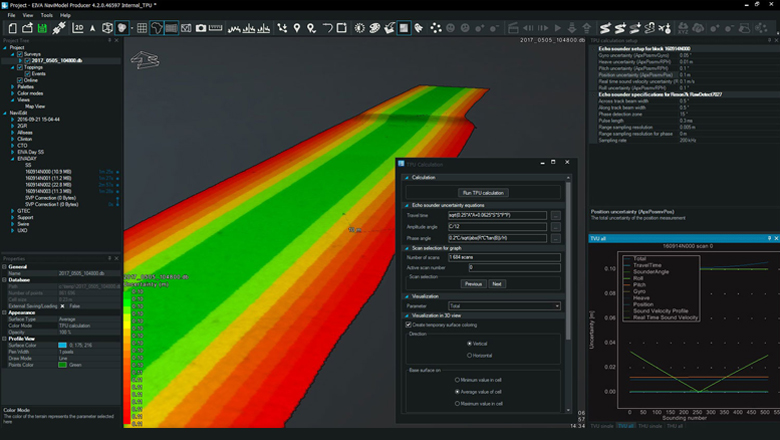
Colouring the DTM according to the level of uncertainty of the raw data
It is also possible to analyse the individual swathes and how they match specifications.
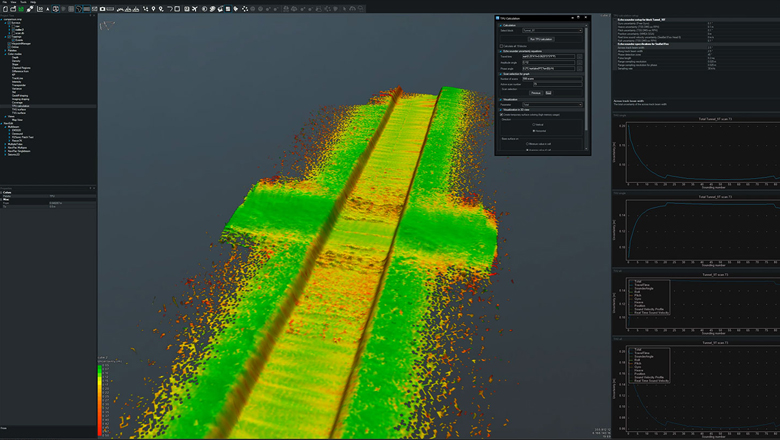
Scan-by-scan view of the TVU
All the TPU (TVU/THU) values of a survey are available for use in custom surface models and are used in specific surface/cleaning algorithms such as the CHRT (CUBE V2) (more on this later on).
You are of course also welcome to reach out to us if you have any questions.