To use this site, please enable javascript
To use this site, please enable javascript
Bathymetric surveys are often intensively post-processed in order to produce accurate results and extensive end reports. In certain types of operations, the here and now picture created from the data is of a higher importance than the post-processed data after the job is done. In these cases, the collected data acts simply to document the process and nothing more.
One example is in construction support or dredging where it is common to conduct periodic bathymetric surveys to assess the progress of the operation – and the here and now situation. The conditions at dredging sites are not always ideal for carrying out surveys with sonars, the water is often filled with disturbed material which leads to noisy data. Therefore, for an effective progress assessment, the noisy sonar data requires real-time cleaning.
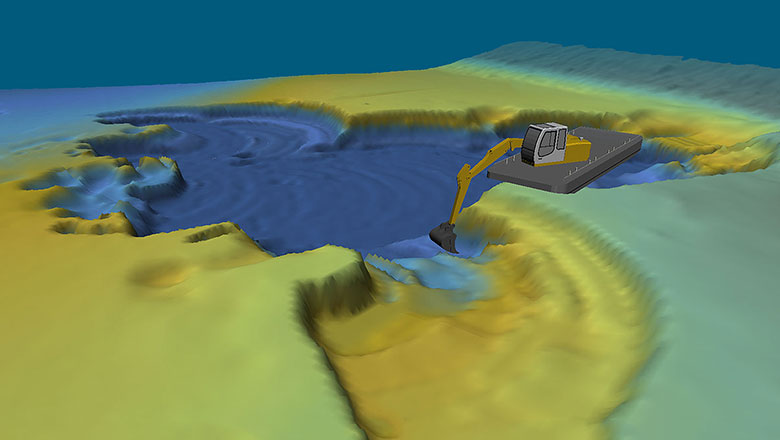
An example of a cleaned DTM (Digital Terrain Model) of a dredging site displayed with NaviSuite Uca software, EIVA’s software bundle dedicated to monitoring of dredging operations
Whenever an operation is put on hold because a survey boat or USV (Unmanned Surface Vehicle) is collecting data, a fast, usable result becomes a powerful tool. When speed is rated higher than the absolute quality of the deliverable result, real-time data cleaning becomes more valuable than post-processing.
As part of EIVA’s strategy to continuously provide increased efficiency to our customers and their operations, the software development team has implemented two new features to support near-real-time results.
The new real-time DTM cleaning feature allows for EC-3D (EIVA Cleaning 3D) cleaning filters to be applied to sonar data as it is being acquired and displayed in NaviPac Helmsman’s Display.
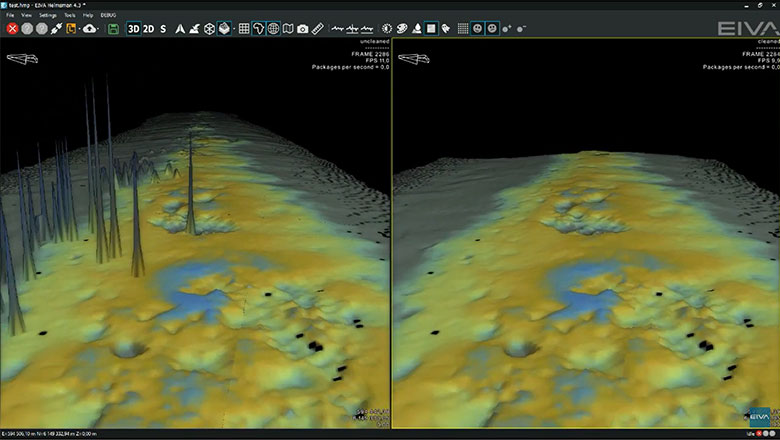
An unfiltered DTM (left) and an online cleaned DTM (right) displayed in real-time with NaviPac Helmsman’s Display
In the video, two real-time DTMs are being created, one with the unfiltered data, and one where the real-time DTM cleaning feature has been applied. Both DTMs can be displayed simultaneously by using two map displays that are visually synchronised (using the Sync Key feature) – which results in the same viewing position at all times. The cleaned DTM is ready to use either by exporting to third-party software, or directly with NaviSuite Uca for example, to provide the dredge operator an updated DTM for both the visualisation and assessment of progress in the cut.
During our customers’ current operations, real-time data is viewable with NaviPac Helmsman’s Display which displays a usable DTM, however, this includes all of the noisy data. For the high quality final result, the raw data is imported into NaviEdit and processed further (re-calculated GPS, tidal, ray bending, etc) to generate a new, clean DTM. With the real-time DTM cleaning feature, NaviEdit is able to read the filter settings while the data is imported. As a result, the cleaned data can be used in NaviEdit whenever the quality is at an acceptable level, which eliminates the need for re-filtering or the software having to redo the work.
The real-time DTM cleaning feature does not modify the acquired data – all the acquired sonar points are available for post-processing in NaviEdit and NaviModel after the operation. All the real-time cleaned points are marked as such, so that NaviEdit and NaviModel can use the cleaned data in further re-processing. Similarly, the real-time cleaned data can be altered or discarded, so that NaviEdit and NaviModel can use the uncleaned data for further re-processing.
The real-time DTM cleaning can be fully controlled by defining which filters are applied to the bathymetric data, and with which settings.
As part of the new feature, the software development team has made it possible to combine and save preferred EC-3D area-based filters and scan-based combinations. Defining new filter combinations for different types of jobs and operations is simple, and the combination can be saved in a named template. Furthermore, the applied filters are saved within a project, which means all the settings are saved for a later date or when continuing with a project.
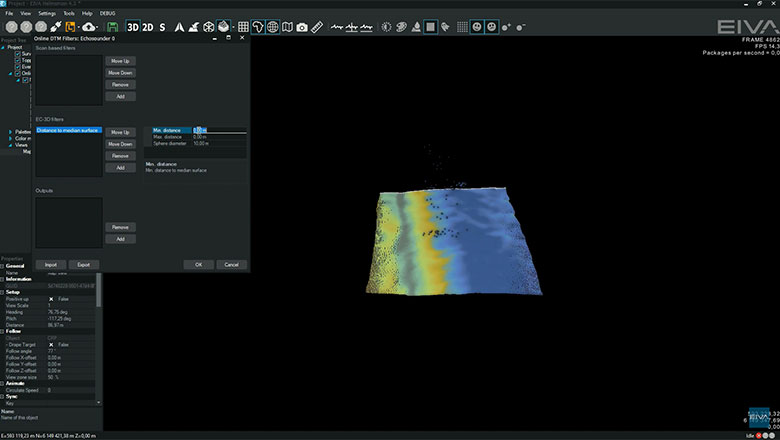
Selecting the cleaning filters applied to the bathymetric data within the software
Real-time DTM cleaning and defined cleaning filters will be introduced to NaviPac and will be available with NaviPac Pro, and together with the NaviSuite Kuda and NaviSuite Nardoa software bundles.
Currently, both features are available in pre-release versions for beta customers. The full version will be included as part of the upcoming NaviPac Pro release. For autonomous processing, the same capabilities are available in the Workflow Manager, which is a configurable tool that automates the smaller steps taken when processing subsea data.
If you feel these new features will increase the efficiency of your operation, or you have an idea about what features would, then get in touch and we’ll do our best to meet your needs.