To use this site, please enable javascript
To use this site, please enable javascript
The application of ROVs (Remotely Operated Vehicle) across subsea industries is vast: oil and gas, offshore energy, search and recovery, military, aquaculture, marine biology, maritime archaeology, submerged infrastructure, recreation, discovery, and the list goes on…
Depending on the type of operation, the requirements for the ROV’s hardware and software differ. Just think of how limiting and risky the conditions under the water can be – for example in tight tunnels. Therefore, choosing the right software for control of the ROV and to support your inspections is equally as important as the choice of ROV itself.
To help you navigate the decision, the ROV software experts at EIVA have created a list of factors to consider! These factors have been uncovered during our years of developing solutions for subsea software solutions – including NaviSuite Mobula, EIVA’s ROV control and inspection software.
Dive in to the list below to learn which ROV software capabilities can provide benefits for different types of operations, as well as tips for how to take your sensor setup and budget into consideration.

A VideoRay Defender preparing for a heavy-duty subsea mission requiring the precise control of its seven thrusters
The software is the link between pilot and ROV. One of the important factors to look for is therefore the control the software gives the pilot. This determines the precision and accuracy of navigation, allowing the pilot to extract the full potential of their ROV.
What happens if software doesn’t provide control and stabilisation? The consequences include negative effects on the quality of subsea data collection, the time taken to reach targets and, in the worst-case scenario, damaging assets or the ROV itself.
Essential ROV software control functions include flight modes and station keeping. Flight modes improve the ROV’s stability in the water, enabling the ROV pilot to navigate with more consistency. Some handy, basic flight modes to look out for are: manual, assisted steering, automated control, auto-heading, depth hold, auto-altitude, pitch and roll, lock heading and lock height.
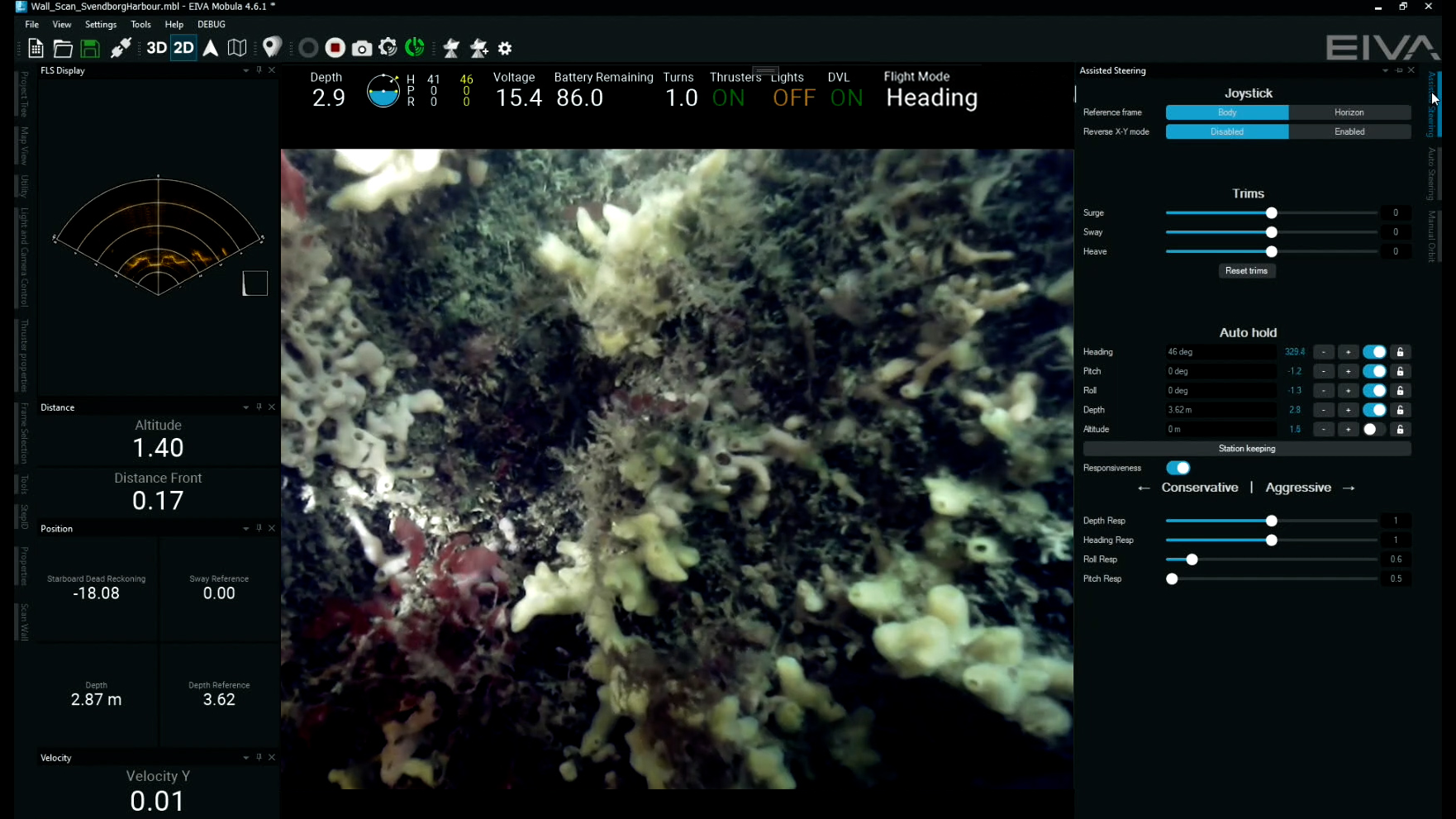
NaviSuite Mobula customised interface during an ROV inspection of a harbour wall – the ROV is in assisted steering flight mode Auto hold heading
Another control factor to look out for is how many degrees of freedom the software gives the pilot. If your ROV has six, seven or eight thrusters, taking advantage of the full six degrees of freedom will depend on the control your ROV software puts at your fingertips. Joysticks and gaming controllers are ideal for providing control in all directions. Which is why, when looking at ROV software, it is a good idea to check which joysticks and controllers are supported.

A BlueROV2 ready to be deployed and controlled by joystick with six degrees of freedom in NaviSuite Mobula ROV control and inspection software, which is running on the laptop
Logging data is an essential function to look for in ROV software if you are performing operations which involve surveying and data collection, such as exploring shipwrecks and pipeline inspections. Logging data not only opens up the data to visualisation and manipulation, but also deliverability to an end client for enhanced asset integrity management and analytics.
To optimally log data, the software needs to create a dive log where all data is timestamped and synchronised with observation registration. This log should allow for the playback of multiple data streams at the same time. With this recording function, you gain the ability to replay an ROV dive in 3D, identify points of interest, generate fly-through videos, and save entire project datasets for analysis and manipulation at a later date. Camera, sonar, laser, positioning – all sensor data – must be made accessible to those off-site, such as processing personnel and stakeholders wishing to follow the operation.
Furthermore, recorded data can be used to benefit your next dive when played alongside a real-time data stream, which can simplify returning to areas of interest and identifying observations.
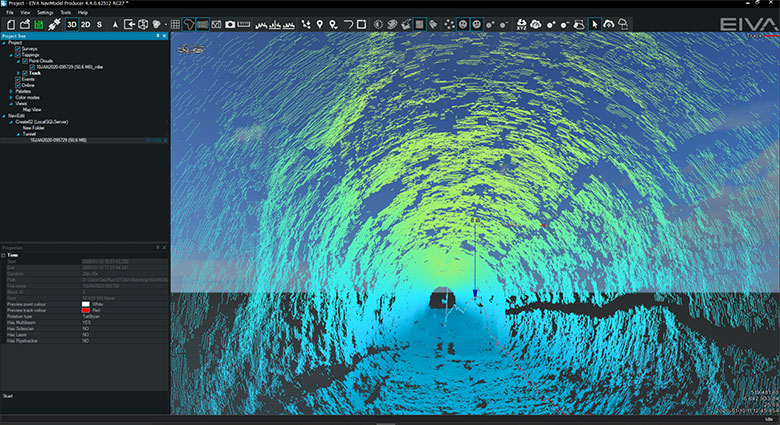
An underwater tunnel inspection performed by an ROV fitted with Imagenex DT360 multi-beam profiling sonar, the data was visualised and made deliverable via NaviModel
NaviModel is an example of a high-performance software which visualises digital terrain models (2D/3D) and point clouds. It includes high-tech tools for model analyses and manipulations. For the most comprehensive data deliverables possible, you can choose the variant NaviSuite Mobula Pro + Processing, which lets you can share your projects with others – so they can navigate it themselves with the free software variant NaviModel Viewer.
When considering ROV software, you need to think about your current sensor setup, and how easy it would be to upgrade or replace sensors for future dives. In addition, consider if the software supports sensor and data fusion for accurate real-time positioning.
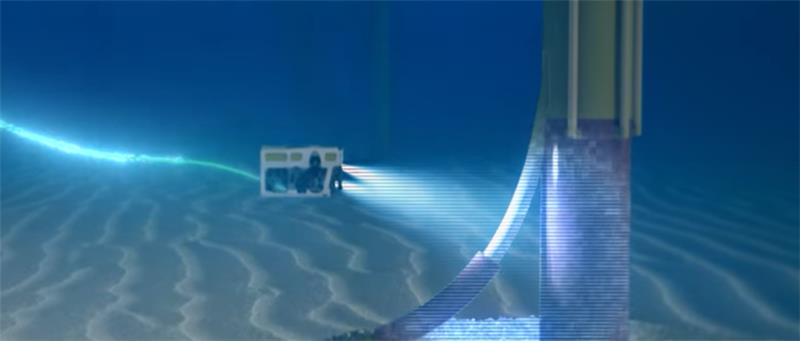
There are several types on sensors you can equip your ROV with for superior inspections… Adding positioning sensors such as USBL (ultra-short baseline), DVL (Doppler velocity log), and INS (inertial navigation system), allows for 3D positioning and positioning the ROV on a map, as well as synchronising collected data with a geo-reference. The same applies when creating a real-time 3D wedge display and mosaic generation. Furthermore, adding multi-beam scanning sonar and subsea lasers opens the possibility to build point clouds of the seabed and surroundings.
Considering the constant improvements in technology, ideally your ROV software should be sensor agnostic, support a large range of sensors or at least have the option to customise for any future operational demands.
NaviSuite Mobula is an example of sensor agnostic software – and by offering the software in different variants, you can essentially pay for only the sensor support you need. For example, the NaviSuite Mobula Core variant is the most basic sensor option of this advanced ROV control software, supporting integration only with the Ping360 scanning imaging sonar, while on the other end of the spectrum the NaviSuite Mobula Pro variant supports multi-beam echo sounder, scanning/mechanical imaging sonar, multi-beam imaging sonar, scanning/profiling echo sounder and laser scanner (multi-head), as well as positioning with GPS, DVL, INS and USBL.

Here you see NaviSuite Mobula displaying positioning (left middle), camera feed (centre) with live data overlays (top) and scanning imaging sonar data in a wedge view (left top) in real time – while automatically orbiting a boulder with the flight mode Orbit
Basic station keeping features and flight control modes can assist the ROV pilot by taking some burdens of navigation away; and when software takes the helm through automation, it makes smooth sailing of operations which are otherwise very difficult when flying manually. Plus, efficiency really rides the waves alongside! With advanced station keeping features (such as trims, cruise, orbit, set point control for any degree of freedom) the ROV gains the ability to fly semi-autonomously with little supervision and input.
To go fully autonomous and increase efficiency further, it requires reducing manual steering altogether. A go-to-waypoint mode, where the software leads the ROV to a marked-out point, is a step in this direction. A benefit of this is that while the ROV is station keeping or automatically navigating towards a waypoint for example, the pilot can change the roll or pitch, looking around the ROV for observations, without disturbing positioning during navigation.
The next step in automation is a follow-route mode, where the ROV is guided along a defined path, planned out pre-dive. Optimum path planning tools can be search pattern or area coverage modes. Typically, you define a perimeter (for example a polygon, circle or square), then the software designs the optimal coverage path in that area and executes the route. To simplify the inspection of subsea structures, the next step is a high-level mission planning tool to scan a structure. With automated coverage modes like this, you can ensure optimal coverage, and that your ROV remains at a constant velocity and distance from the object it is scanning.

NaviSuite Mobula in action using automated inspection modes
If the software allows for meaningful automation, your ROV dive will be more efficient and less demanding. Here are a few more basic, yet essential, automation questions to ask yourself:
How you manually control your ROV depends on what you see in the user interface – for example what real-time information you receive during the dive. The interface thereby contributes to how safely and efficiently your ROV can move through the environment under manual control.
In general, a customisable user interface allows the user to peel off all irrelevant information and functionality and keep what’s important for the specific task at hand. Most software tends to be designed as a one size fits all, yet one size rarely fits all. As a consequence, information and functionality overload are a common problem due to the filtering of the non-essential and locating the relevant. Overload impedes the decision-making process, increases the time taken to complete tasks, and diminishes the user experience.
During ROV operations, user interfaces can include multiple views, map backgrounds, close up and map overview, multiple cameras with live video streaming, video playback, real-time 3D display, multiple 3D or 2D views in a single display, ROV point-of -view, live views of sonar/laser scans, imported 3D image of the structure you are inspecting, previous data from inspections (runlines, point clouds, seabed, structures, etc), model generation of the seabed or a DTM (Digital Terrain Model), to name but a few… It’s clear to see how overload can be a problem if you can’t control what you’re displaying.
When flow and information architecture are built into ROV software, it underpins the mission and gives rise to a more intuitive and effective workflow. Thereby, the software mimics your general workflow and presents the relevant information and functionality, during each specific step the dive.
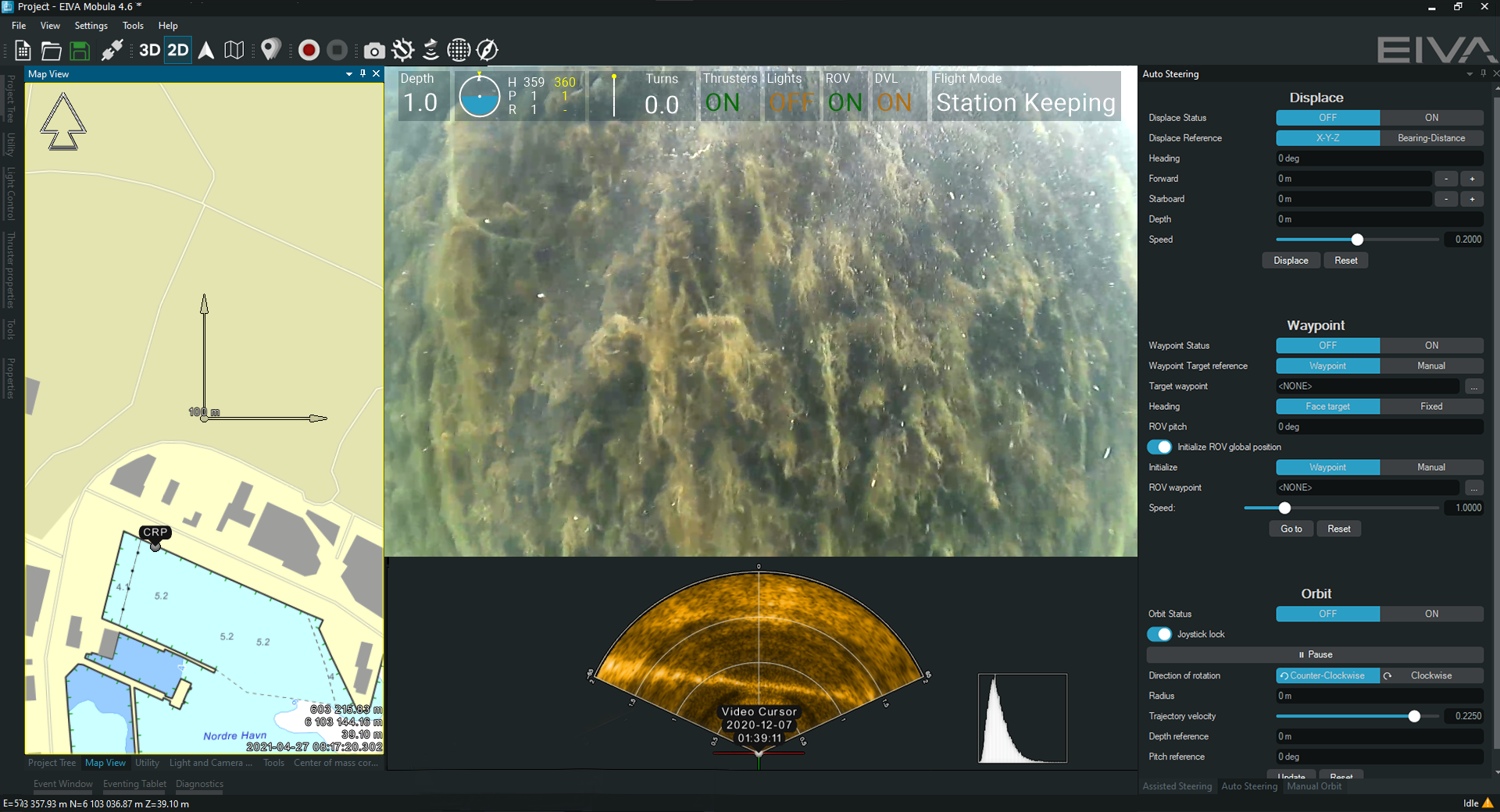
In this NaviSuite Mobula customised user interface, you see the map view (left), camera view with live data overlays (centre), the scanning imaging sonar wedge view (centre bottom) and the Auto Steering window (right panel) with which you can for example automatically navigate your ROV to a waypoint
The software that comes as standard from ROV manufacturers range in features, capabilities and price. The previous sections have focused on the features available in the software, however another factor which affects the price is software support. If the thought of a mid-dive software crash brings on a cold sweat, then a high-end solution, where support is provided, is likely the way forward.
Finding the right buoyancy of your budget, while reaching a suitable mix of features, data management, integration options and automation, should ultimately differentiate the software package you choose to satisfy your ROV requirements.
We hope that this list has helped you gain an overview, so you can decide which factors are most important for your decision!
EIVA’s complete software solution for ROV operations, NaviSuite Mobula, is our offering to the ROV water world! Read what customers have said about it…
'Our ROV’s flight characteristics are amazing when using the control software in NaviSuite Mobula. With this software, the ROV now does everything I was hoping for.'
Kelsey Treloar, co-managing director at Southern Ocean Subsea PTY Ltd.
‘The setup is user-friendly, and we’ve received great support. We like the piloting features like auto depth and auto heading, as well as capabilities like recording footage, integrating navigation equipment (USBL), extra settings for adjusting gain and displaying a variety of information on the screen to help the pilot.'
Paul Storey, ROV supervisor and director of Below and Beyond Ltd
NaviSuite Mobula is feature rich and can be purchased in different variants to suit the demands of differing ROVs, dives and operational requirements. To see what its capable of, check out the NaviSuite Mobula playlist on YouTube or get in touch with a member of the crew and tell us what you’re next dive involves.
Curious to try it? You can experience the ROV control NaviSuite Mobula gives you first-hand – request a free trial. NaviSuite Mobula is available as a plug-and-play solution for VideoRay’s Defender ROV and Blue Robotics BlueROV2, and with a little coding can support any ROV models.