How EIVA’s ROV control and inspection software was used to automatically map 2,500 m2 of the seabed for marine habitat protection – in one dive
‘With the BlueROV2 Heavy running NaviSuite Mobula’s intuitive software interface, we were able to automatically survey a large area to show it fulfilled several criteria for biogenic reef habitat protection,’
Michelle Melin
Aquatic Science and Technology engineering Master’s graduate,
who used NaviSuite Mobula for ROV mussel reef mapping in her thesis
The challenge of identifying which marine areas need protecting
Mussel reefs can provide important habitats for a variety of marine species – and therefore they are often considered biogenic reefs. According to the EU Habitat Directive, Denmark must map and protect mussel reefs that fulfil the defined criteria for biogenic reefs within relevant Natura 2000 areas, the largest network of protected areas in the world. But how do you survey large areas to identify these biogenic reefs? There’s no standard answer… however, the first steps have been taken to get there.
In 2021, Jon C. Svendsen, a senior scientist at DTU Aqua, the Danish National Institute of Aquatic Resources started a project to study the possibility of using ROVs (remotely operated vehicles) for mapping and identifying biogenic mussel reefs. For this, Jon and his team, including Michelle Melin, an Aquatic Science and Technology engineering Master’s student, enlisted EIVA’s help with equipment and software. In this case study, you can learn about…
- The ROV hardware and software setup tested
- The software tools used for mission planning and automated steering
- How 2,500 m2 of seabed was mapped and analysed
- How the DTU Aqua team plans to use this setup to make a project where volunteers can get involved in data collection to map and protect biogenic reefs
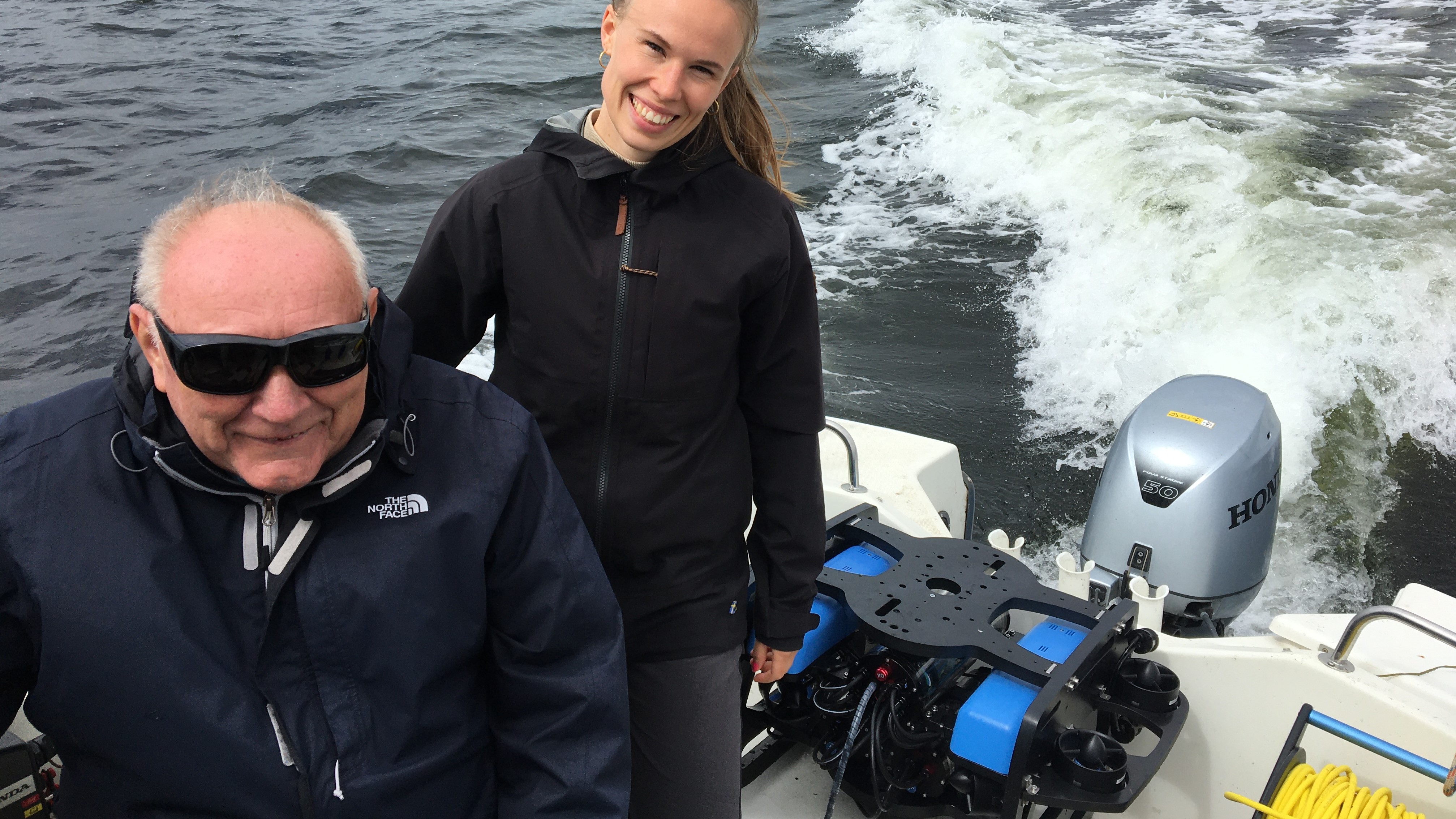
Michelle Melin during sea trials, with the BlueROV2 Heavy, accompanied by one of the local fishermen who contributed to the project by boating Michelle Melin out to the mussel areas
Partnering up to create an ROV survey setup
‘When we were looking for a company to deliver an ROV survey solution, our analysis pointed to EIVA as the best provider,’ explained Jon C. Svendsen. It was a match made under the sea!
Through EIVA, DTU Aqua purchased an ROV, specifically a BlueROV2 Heavy from Blue Robotics. EIVA went beyond simply providing an ROV, and helped to deliver a total sensor and software platform – firstly by assisting with their setup, equipping the ROV with:
- An extra Fathom-X communication board, so they could have two IP-cameras on a different network from the ROV
- A Teledyne RD Instruments Wayfinder DVL
‘It was great working with EIVA, the team provided great service, delivering adjustments quickly as needed. We felt that they really understood the context of the project,’ described Jon C. Svendsen.
… as well as by providing software.
ROV setup is complete with the software to automate mission planning
In her thesis project, Michelle Melin, a master’s student under the supervision of Jon C. Svendsen, decided to test the use of EIVA’s ROV control and inspection software, NaviSuite Mobula, for a mussel reef survey. With this project, Michelle Melin was the first to trial this total solution, and she laid the way for further development by the research team.
To facilitate this trial, EIVA provided her with a free Academic Licence. This is one of the free licence offerings from EIVA for academics, non-profit organisations and startups, introduced to allow EIVA to contribute to the advancement of maritime research and the future maritime workforce.
‘One of the advantages of using NaviSuite Mobula software to control the ROV is that it can automate ROV steering for more reliable results,’ explained Michelle Melin. We’ll dive into her experiences and results in the next sections.
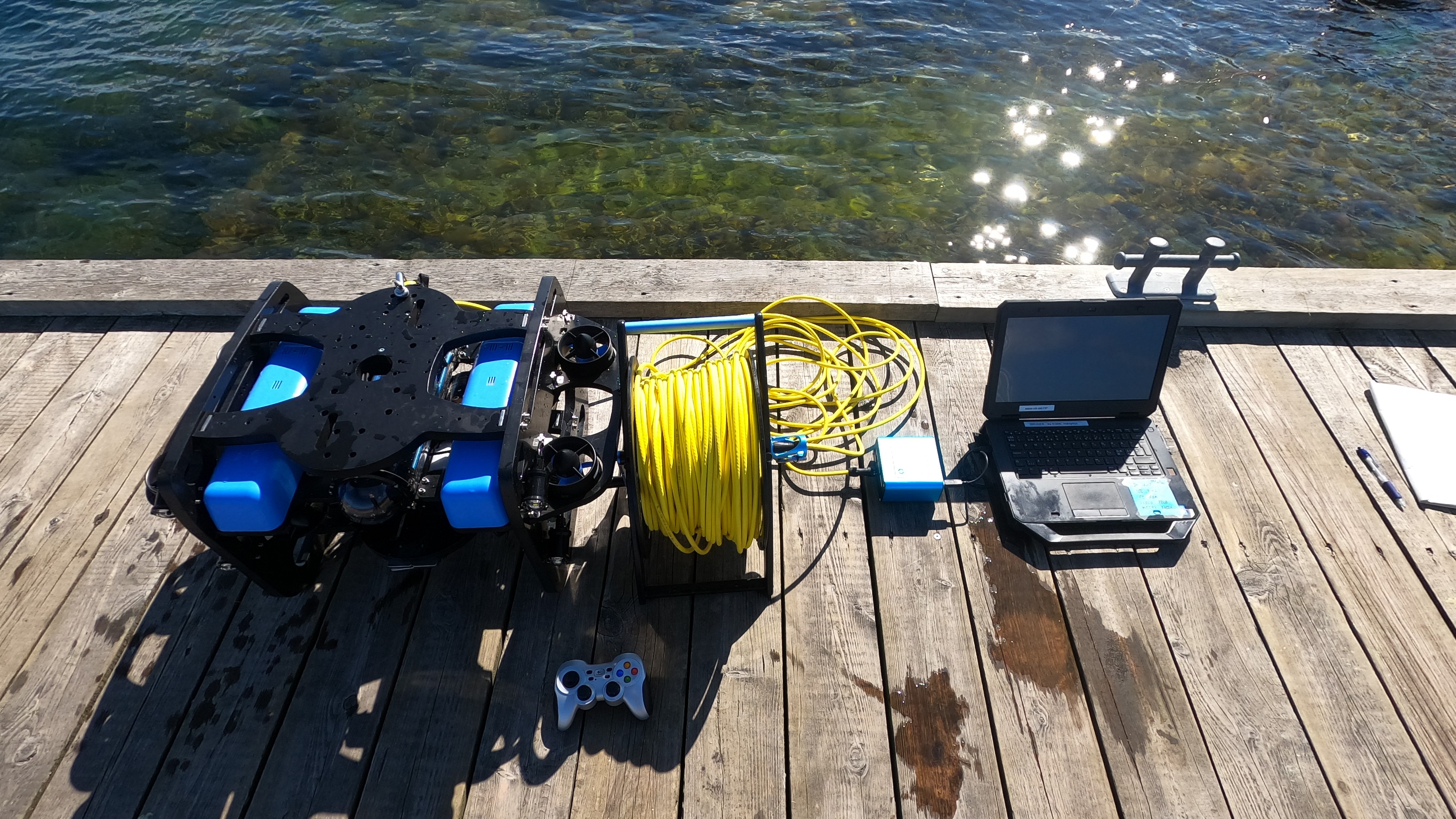
BlueROV2 ROV and laptop ready for a practice dive
Testing out this total ROV solution for mussel reef surveys
Michelle Melin started out by learning the ropes of NaviSuite Mobula. ‘I was by no means an experienced ROV user, but I found that once I’d learned the basics, NaviSuite Mobula was really intuitive to use compared to the software I’d tried before,’ Michelle Melin described.
After she became familiar with controlling the ROV solution in a test arena and a harbour, the next step was to try it out on the real deal: a potential biogenic mussel reef. An area was chosen which was known to have a significant mussel population based on divers’ observations.
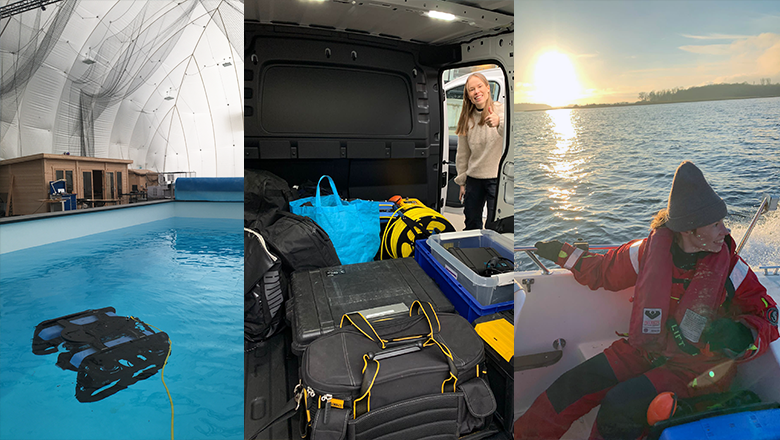
Pictures from testing at DTU’s autonomous systems test arena (left), transporting the equipment (centre) and setting sail for testing the setup at a mussel reef (right)
Automated survey tools
As with most surveys (unless they’re fully automated like in this case), the first step was mission planning. To plan an ROV survey which would cover a large area of the seabed systematically, Michelle Melin used NaviSuite’s automated Lawn Mower Pattern tool. This tool is integrated in NaviSuite Mobula, and it is available offline in NaviModel, EIVA’s visualisation and 3D modelling software solution, which is included in the NaviSuite Mobula Pro + Processing variant.
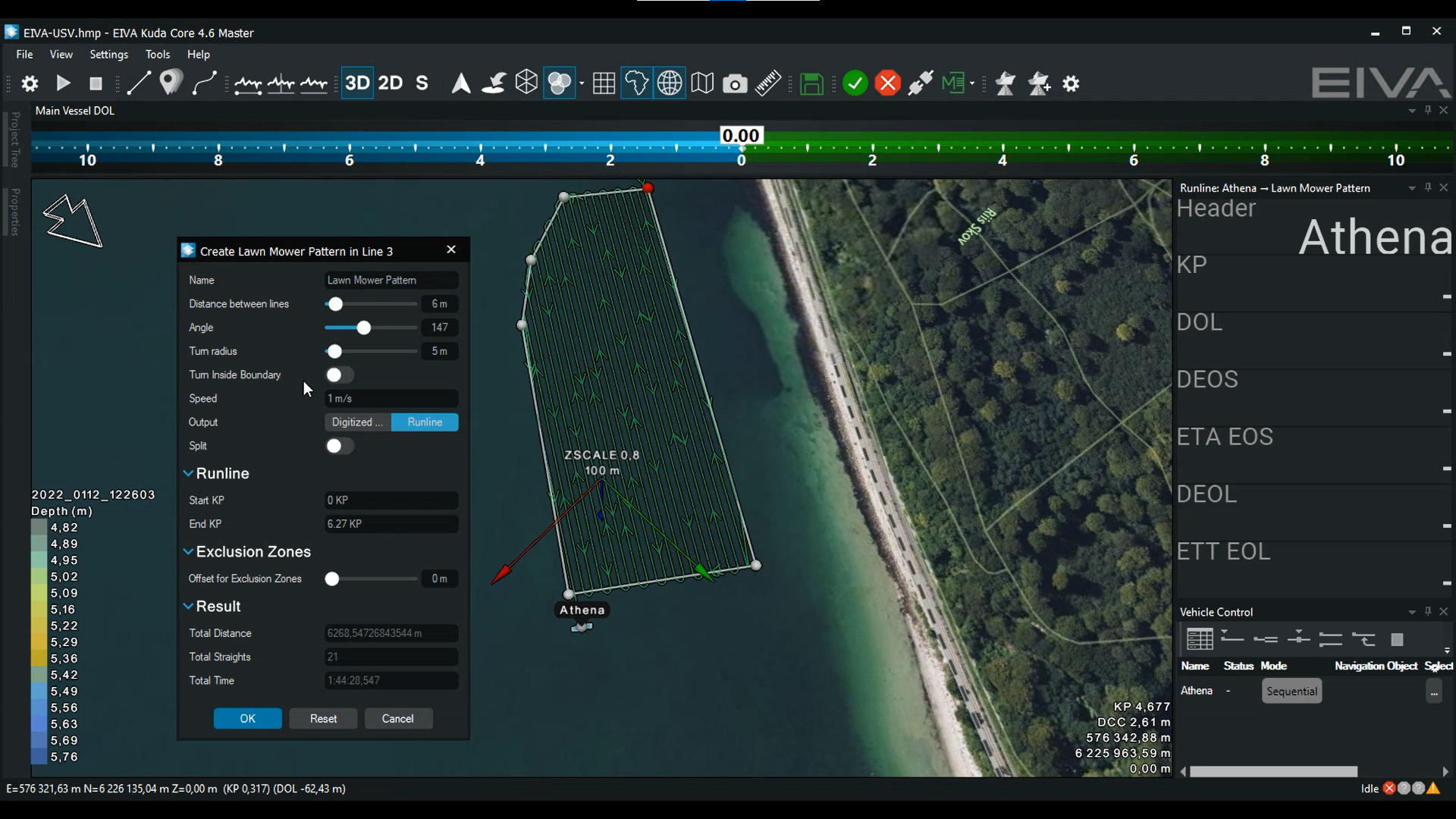
Shown here is a different survey planning example, displaying how you can automatically create runlines to survey an area with the Lawn Mower Pattern tool – the tool even lets you adjust factors such as the direction of the runlines, for example if you wish to be boating at a specific angle relative to the current
With this mission planning tool, Michelle Melin could define the boundaries of the survey area (50 x 50 m), as well as the distance between runlines (she tested out 10 m and 5 m in different dives). It is also possible to adjust the angle of the runlines, as you can see in the video above.
As Michelle learned through experience during her trials of the setup, it’s important to adjust the angle of the runlines according to conditions such as current direction. The angle impacts how much of the time the ROV must go against the current, and therefore the amount of power the thrusters need – thereby impacting the battery life, which is vital when surveying such a large area in one dive.
‘By planning a systematic route, rather than manually steering to cover the area, we were able to make evenly spaced lines and a representative map of the area,’ Michelle Melin explained the benefits of the automated runline planning tool.
During the survey, the ROV automatically followed the planned Lawn Mower pattern runlines using the automated steering mode Follow Route. Supervised autonomy ROV flight modes like this free up operators to spend time on other tasks – by taking over much of the steering.
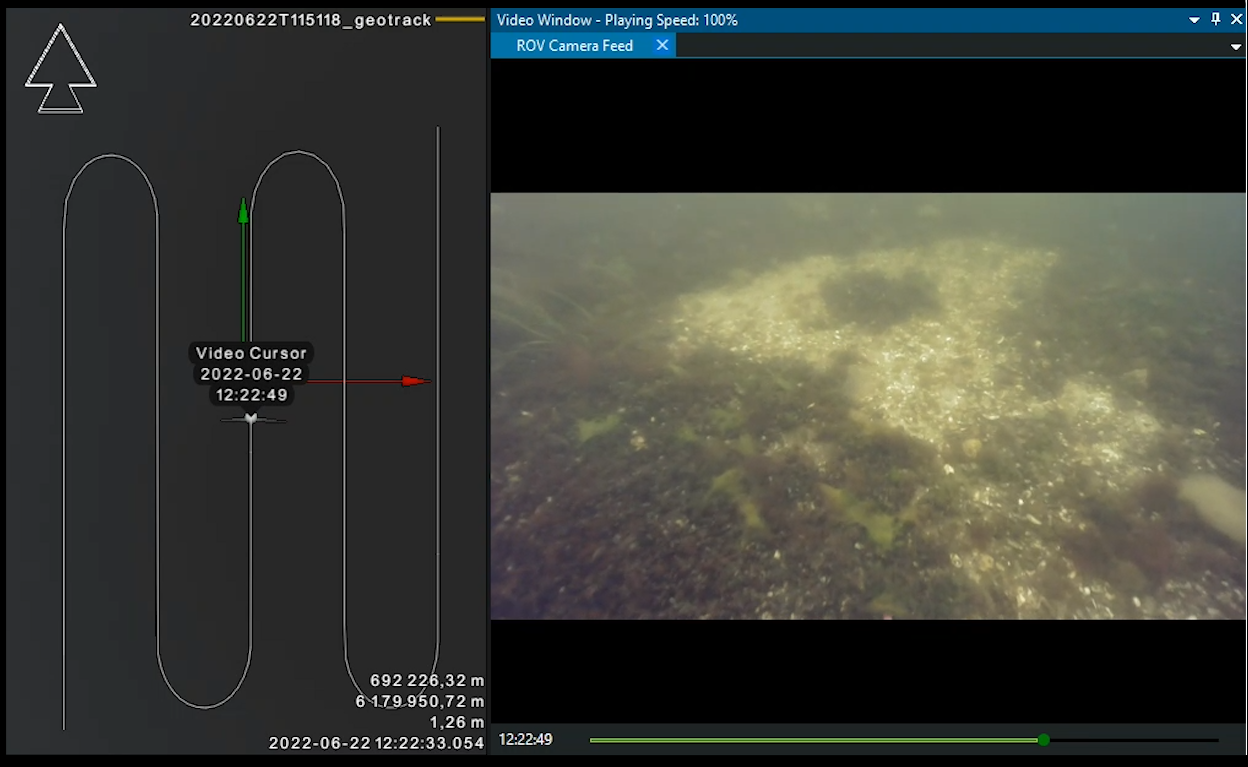
Watch the play-back of the ROV position along the planned route, along with corresponding camera feed playback, as displayed in NaviModel, which was used for analysis and export of data
In addition to using the automated steering modes, Michelle Melin made use of the customisable user interface: ‘We displayed real-time data such as the camera feed, a map of the ROV’s position and the values for depth and altitude – which let us monitor that we were keeping a constant distance over the seabed,’ described Michelle Melin.
The results were used to analyse whether the area must be protected
The goal of Michelle Melin’s thesis project was to test out how to map an area to examine whether it fulfils the criteria for a blue mussel area to be considered a biogenic reef – and therefore needing protection in relevant Natura 2000 areas. Among the criteria: there must be a minimum area of 2,500 m2 and a minimum seabed coverage of 30% mussels.
After successfully demonstrating that the ROV mission setup could survey a seafloor area exceeding 2,500 m2, Michelle Melin went on to analyse of the degree of mussel coverage. In NaviModel, EIVA’s software for visualising and post-processing data, Michelle exported the video data as single images.
She used two different possible methods for analysis on these images. Firstly, analysing the degree of mussel coverage in individual images and then interpolating the values in GIS. Secondly, creating a photo mosaic to see the surveyed area mapped in one view and thereby improve the visual interpretation.
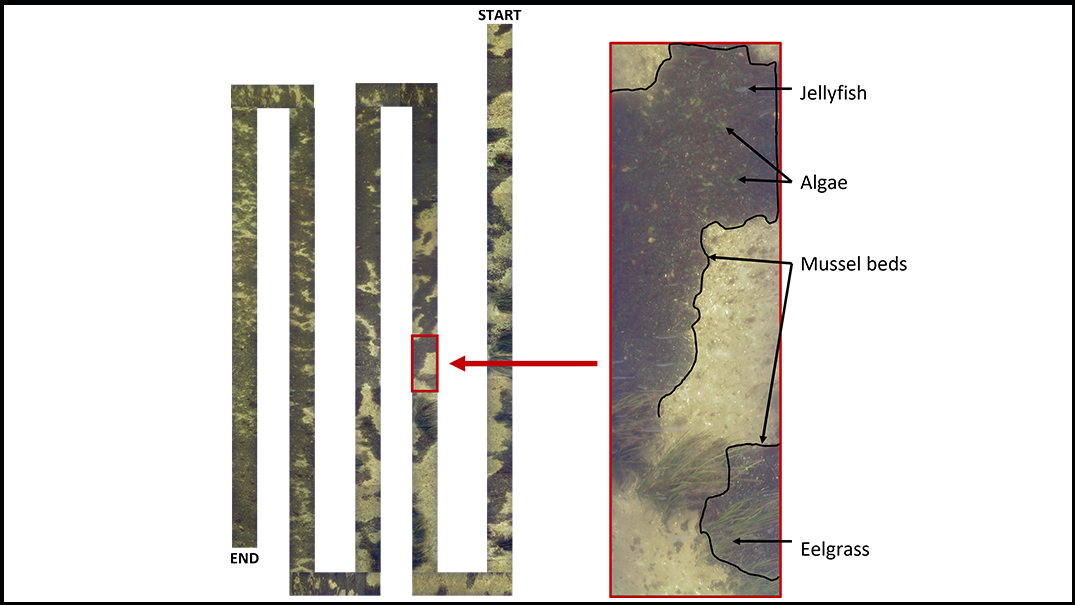
Photo mosaic of a mussel reef from the ROV survey conducted during this project – with several types of marine life identified
Where to dive next in the ROV mussel inspection journey?
Michelle Melin has since graduated, while Jon and others at DTU Aqua continue working on making this mussel mapping project a reality. ‘Our next step is to optimise the method which Michelle used, as well as making manuals,’ Jon C. Svendsen explains that the team aims to make this into a citizen science project. This means enlisting the help of volunteers, who will perform ROV surveys themselves, collecting the data which the experts from DTU will then analyse.
Optimising ROV habitat mapping by combining it with another survey method
When using an ROV to survey a mussel reef, it’s important to first have an idea of where the reef to be surveyed is located. For example, in her results, Michelle Melin could see that the extent of the mussel reef went beyond the area she mapped in her trials.
‘I think a combination of different survey tools will improve the efficiency of using an ROV for habitat mapping,’ Michelle Melin suggested.
By first using other methods to find the limits of the reef area, such as a sidescan sonar surveys, snorkelling, or local knowledge from fishermen, it’s possible to then perform the ROV survey specifically within those limits. While the other methods can more efficiently provide the broad location, the ROV image data is ideal to confirm the presence of mussels and to analyse the criteria of percentage cover defined for biogenic reefs in Danish Natura 2000 sites.
Simplifying the method for citizen science data gathering
‘ROV technology has the potential to be easy enough for volunteers to perform mussel reef surveys with it. By getting locals’ help gathering the survey data, for example fishermen using our ROV on their own boat, not only do we get more data, so we can cover more ground and analyse which areas should be protected… The volunteers get the chance to be involved in mapping and protecting their local environment. It’s really a win-win!’ explained Jon C. Svendsen.
Did you know? EIVA is involved in many more projects like this, for example we are working with São Paolo University on coral habitat mapping using NaviSuite – Deep Learning for identification. Additionally, research groups can develop their own models, and host them in NaviSuite – Deep Learning. Follow the EIVA cruise to get updated on the latest news.
Products in play
- NaviSuite Mobula Pro + Processing
EIVA’s ROV control and inspection software variant which includes NaviModel, EIVA’s software for visualising and post-processing data. Provided for free as a NaviSuite Academic Licence offering.
- BlueROV2 Heavy ROV from Blue Robotics, equipped with…
A Heavy configuration kit of extra thrusters
An extra Fathom-X communication board
A Teledyne RD Instruments Wayfinder DVL
Facts and figures
- Surveys were performed by one surveyor, Michelle Melin, with the assistance of volunteers at the Roskilde Fjord
- 2,500 m2 were covered in a 22-minute dive with mission planning runlines spaced 10 m apart
- The photo mosaic tool used in this project has been developed by scientists at DTU Aqua (see References below)
- Funding and support for this project was provided by:
The Danish rod and net fish licence funds
The Ministry for Food, Agriculture and Fisheries
The EU Interreg project MarGen
Dansk Amatørfiskerforening
Foreningen til Ophjælpning af Fiskeriet i Roskilde Fjord

References:
Stage, B., Lundgren, B., Pedersen, E.M., and Lisbjerg, D.
"High-resolution geo-coded mapping of shallow-water benthic ecosystems using a towed video-array: A pilot experiment,"
Dansk Havforskermøde, 2011.
Stage, B., Lundgren, B., and Lisbjerg, D.
"Design of integrated survey systems to provide high quality, low-cost data for marine management,"
Dansk Havforskermøde, 2011.
.png?mode=crop)