





Key features

Cutting a long autonomous survey story short: What you get
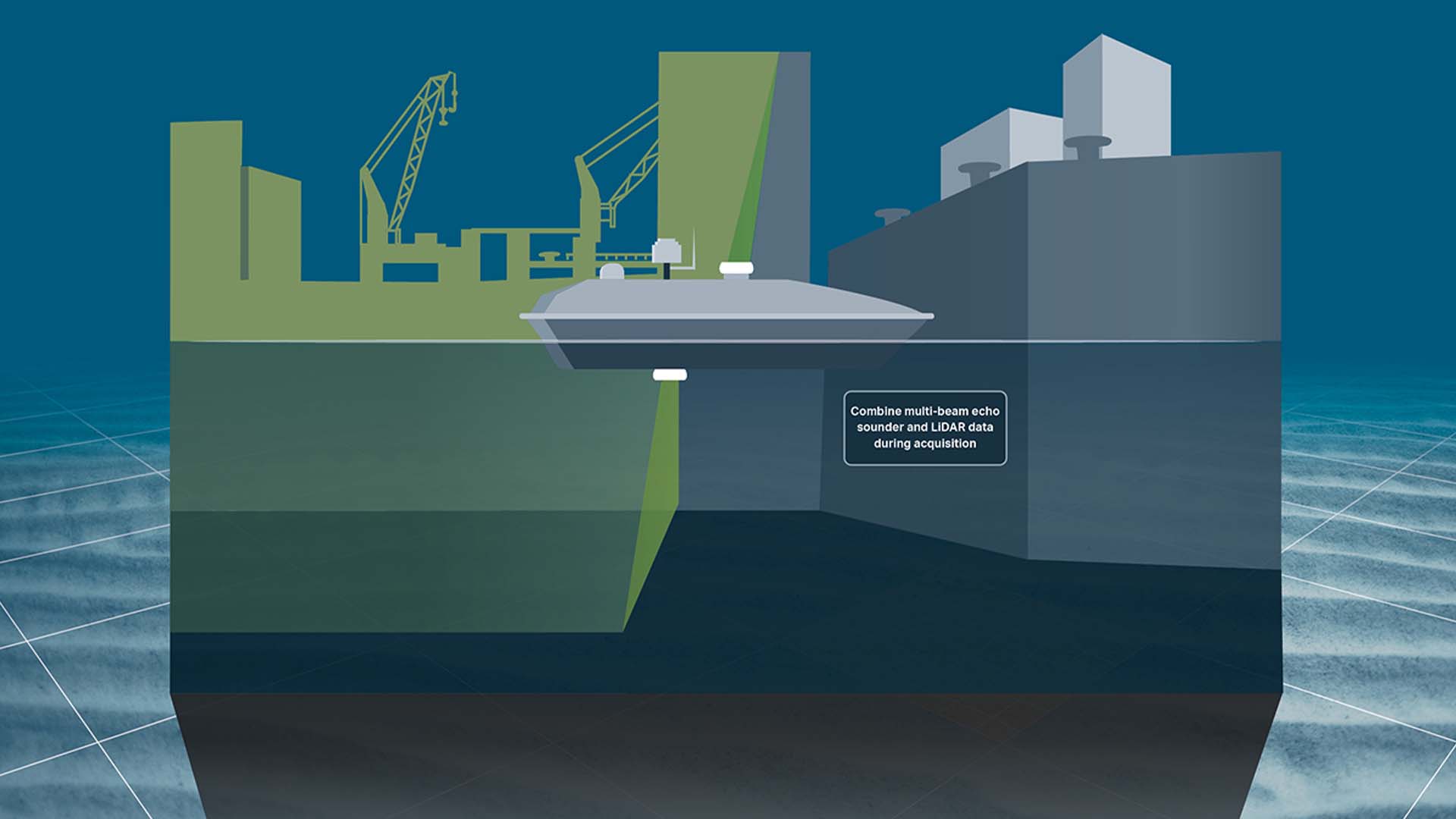
Diving into the details of how ViperFish will provide high-quality data collection during manned or unmanned survey operations.
Cutting a long autonomous survey story short: What you get
Diving further into the details of how ViperFish will improve your manned or unmanned UXO (unexploded ordnance) surveys, MCM (mine-countermeasures), hydrographic operations and more
Keep sensors at the sweet spot
… with the robust, stable 3D steering capability keeping your ROTV at a fixed height from the seafloor
Stable data collection and low energy usage
… through the low-drag design which stays horizontal thanks to the active flaps and reduces the turbulence on the ROTV through laminar flow
Streamlined survey autonomy
… by using Flight software to display/control the position of ViperFish, perform obstacle avoidance and define your sailing route – which is as simple as selecting the area you would like to survey
High quality, adaptable payload
… with the sensors available including Wavefront Solstice MAS/EdgeTech 2205 SSS, R2Sonic MBES, OFG Hypermags Sonardyne SPRINT-Nav Mini and more
-
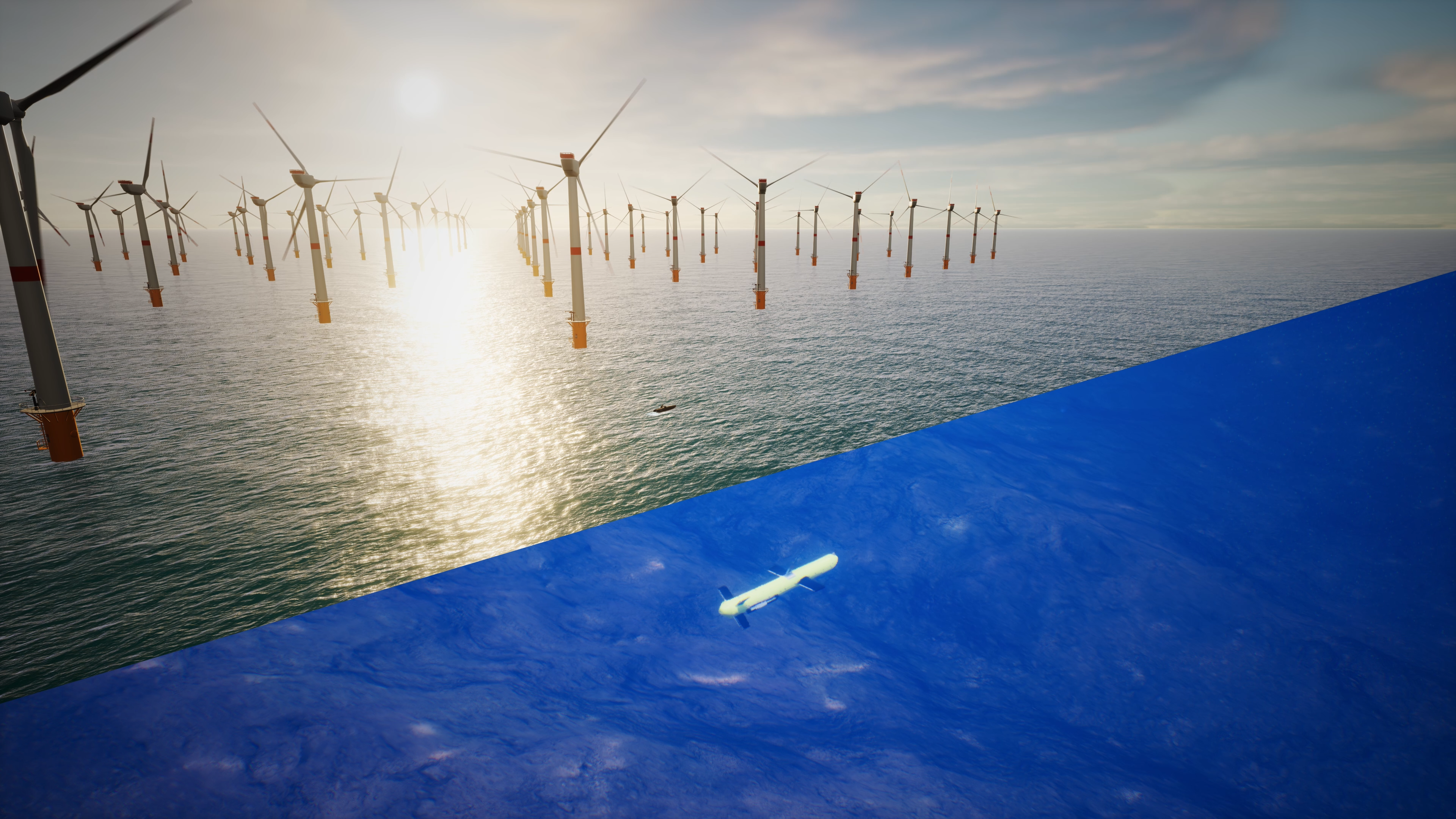
Easy deployment from any vessel
ViperFish can be deployed by any vessel 8 m or longer. Learn how EIVA helps make it easy to deploy this ROTV from small vessels.
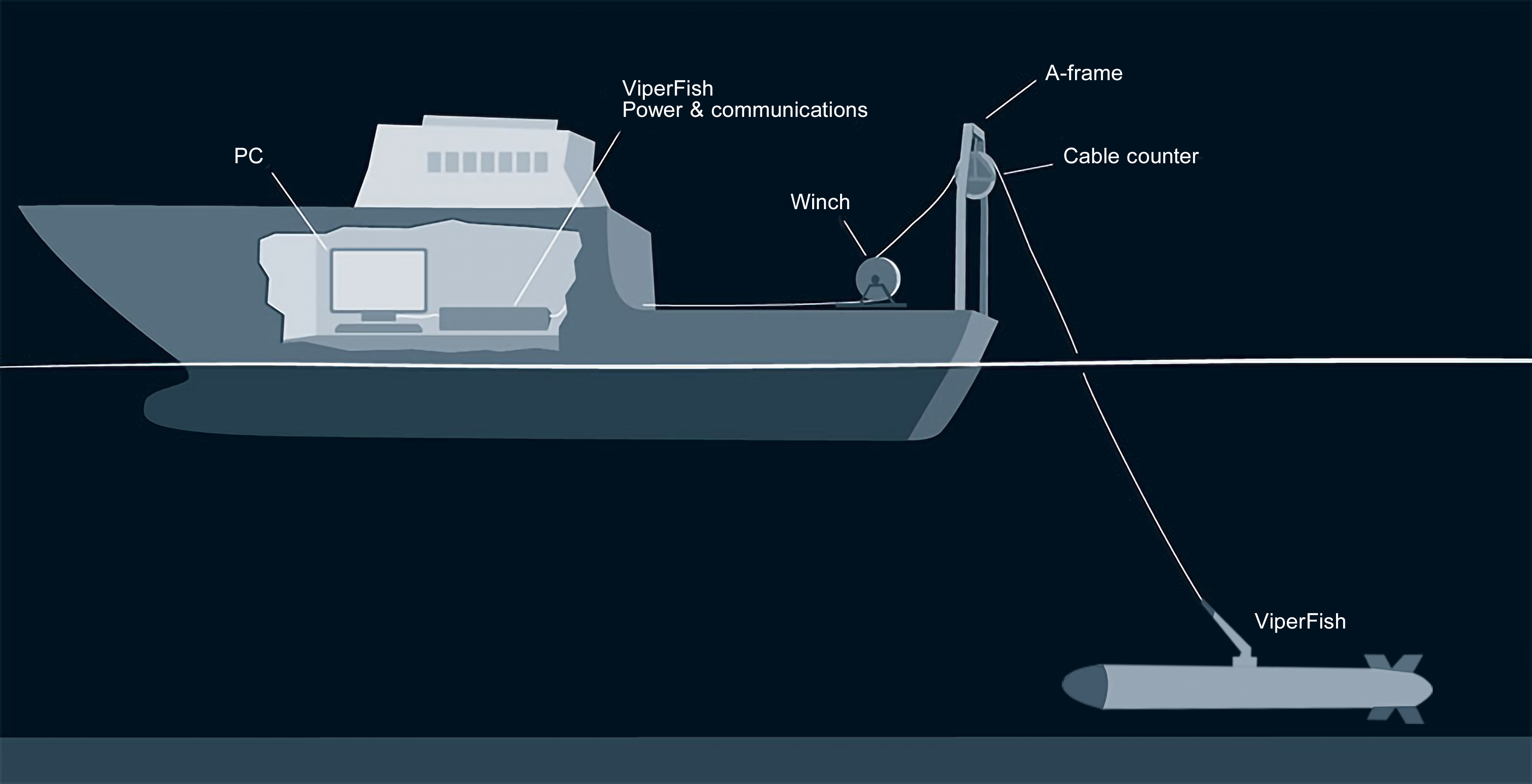
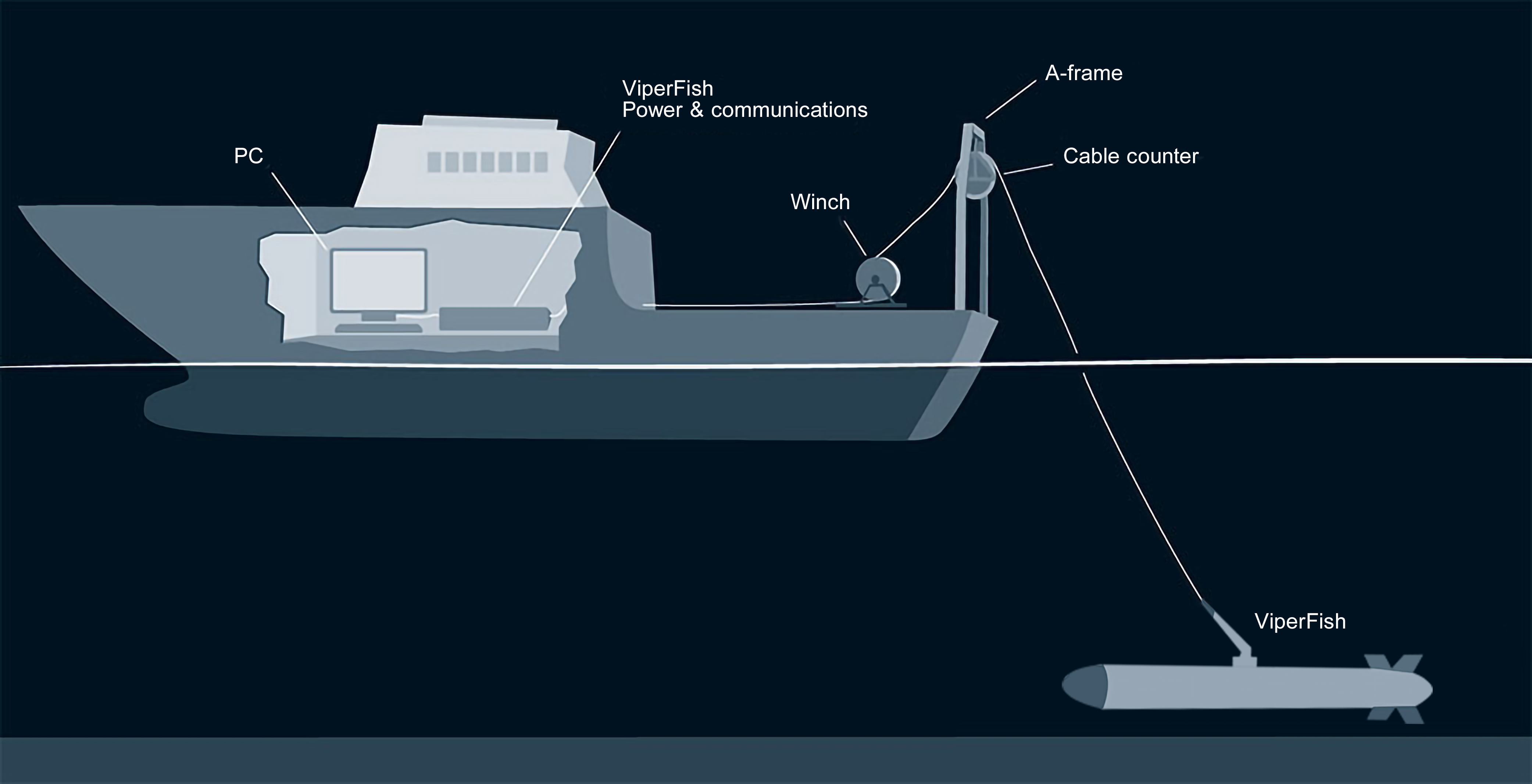
Easy deployment from any vessel
ViperFish can be deployed by any vessel 8 m or longer. When deployed by eg catamaran-type USVs, the ViperFish can maintain a fixed positions between pontoons and stay in water during transfers. By single hull USVs, the ViperFish can be deployed and recovered with an A-frame.
ViperFish has its own dedicated winch, for which you can adjust the level wind / cable exit angle to suit your setup. For fully autonomous operations, this winch can be interfaced to NaviSuite Flight, the same flight software which steers the ViperFish.
-
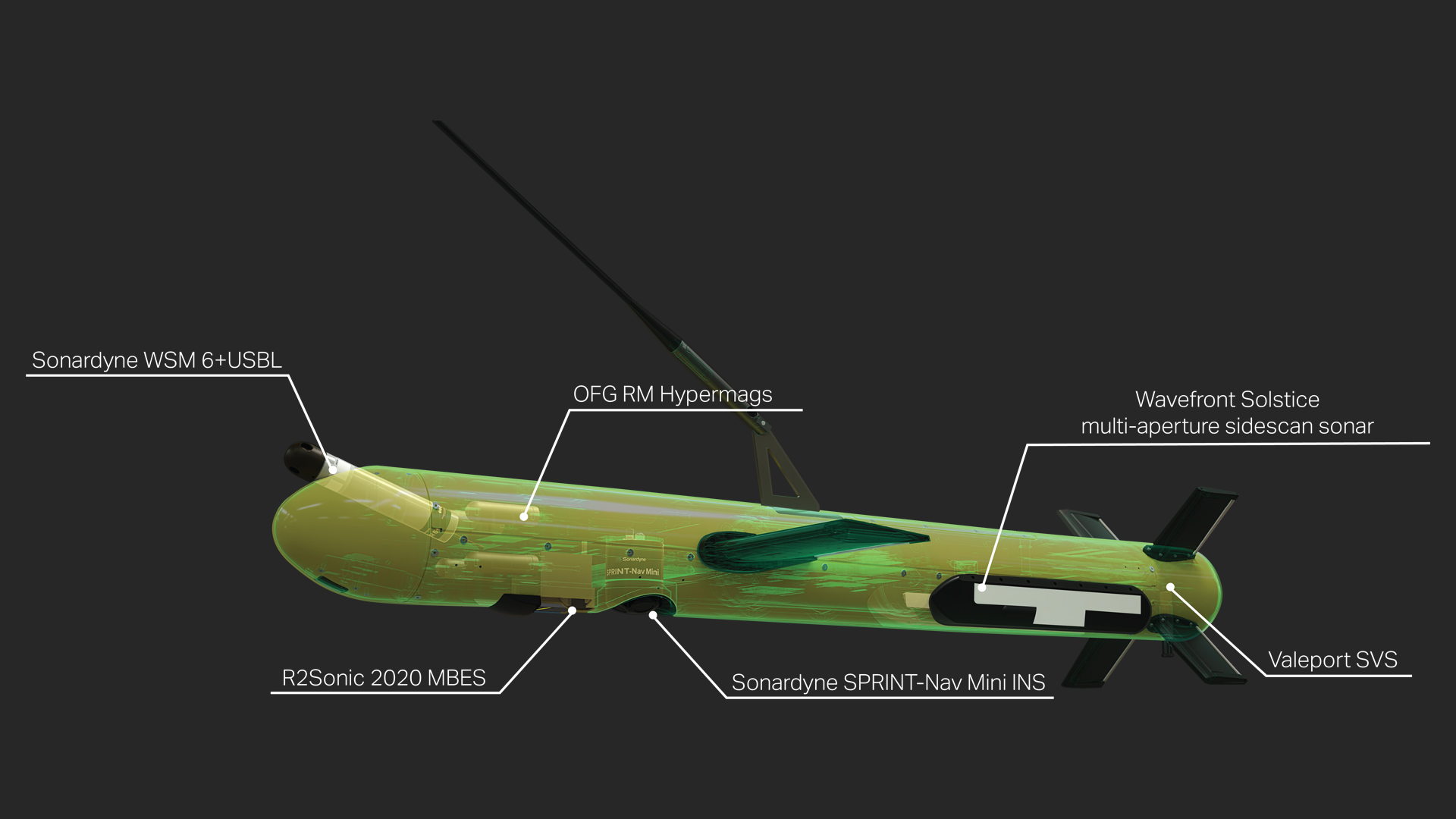
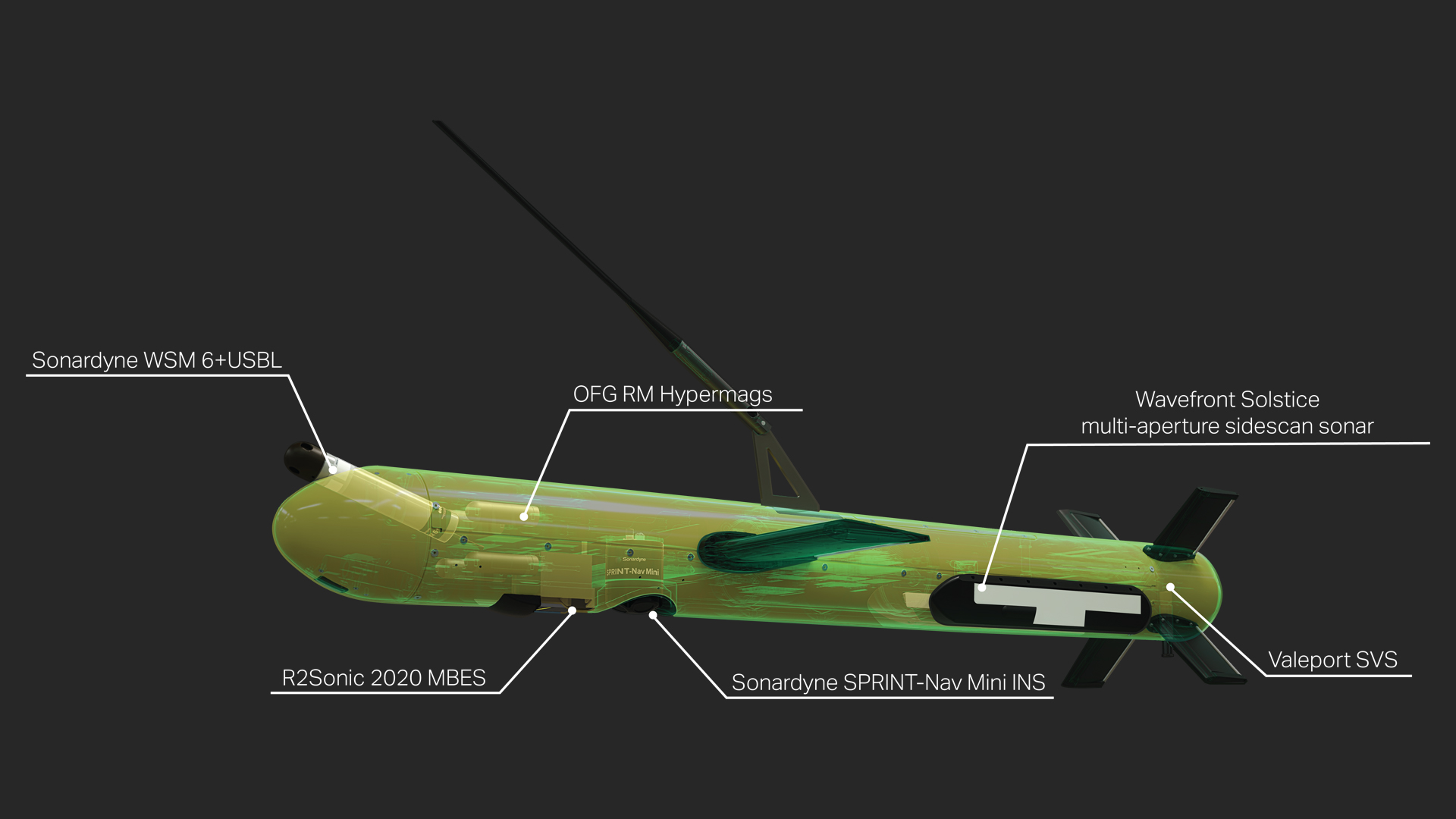
High-quality versatile sensor payload
Dive into the sensor payload configurations, standard components, software and service options.
High-quality versatile sensor payload – dive into the components
The ViperFish is ready to deploy any and all of the below sensors. Pricing accordingly.
Imaging
- Multi-aperture sidescan sonar – Wavefront Solstice
- Multi-beam echo sounder – R2Sonic 2020
- Magnetometer – OFG RM HyperMag
Positioning
- USBL transponder – Sonardyne WSM 6+ 1K MF Omni Directional Assembly
- INS (Inertial Navigation System), AHRS (Attitude and heading reference system), DVL (Doppler Velocity Log), pressure sensor – all in one – Sonardyne SPRINT-Nav Mini
- Sound velocity sensor – Valeport miniSVS
Optional extras
Software add-ons
- NaviSuite Kuda – Pro + Processing (hydrographic survey) or NaviSuite Nardoa (pipe/cable inspection)
- NaviSuite Kuda – Autopilot for USV remote control
Hardware add-ons
- USBL – Sonardyne Mini-Ranger 2
- Dedicated winch – optimised for small vessels thanks to low weight, adjustable exit angle and support for single phase power
- Tow cable (choose from a variety of faired cable options to further reduce drag)
Services
- ViperFish & NaviSuite software mobilisation support & onsite training
- Solstice mobilisation support & onsite training
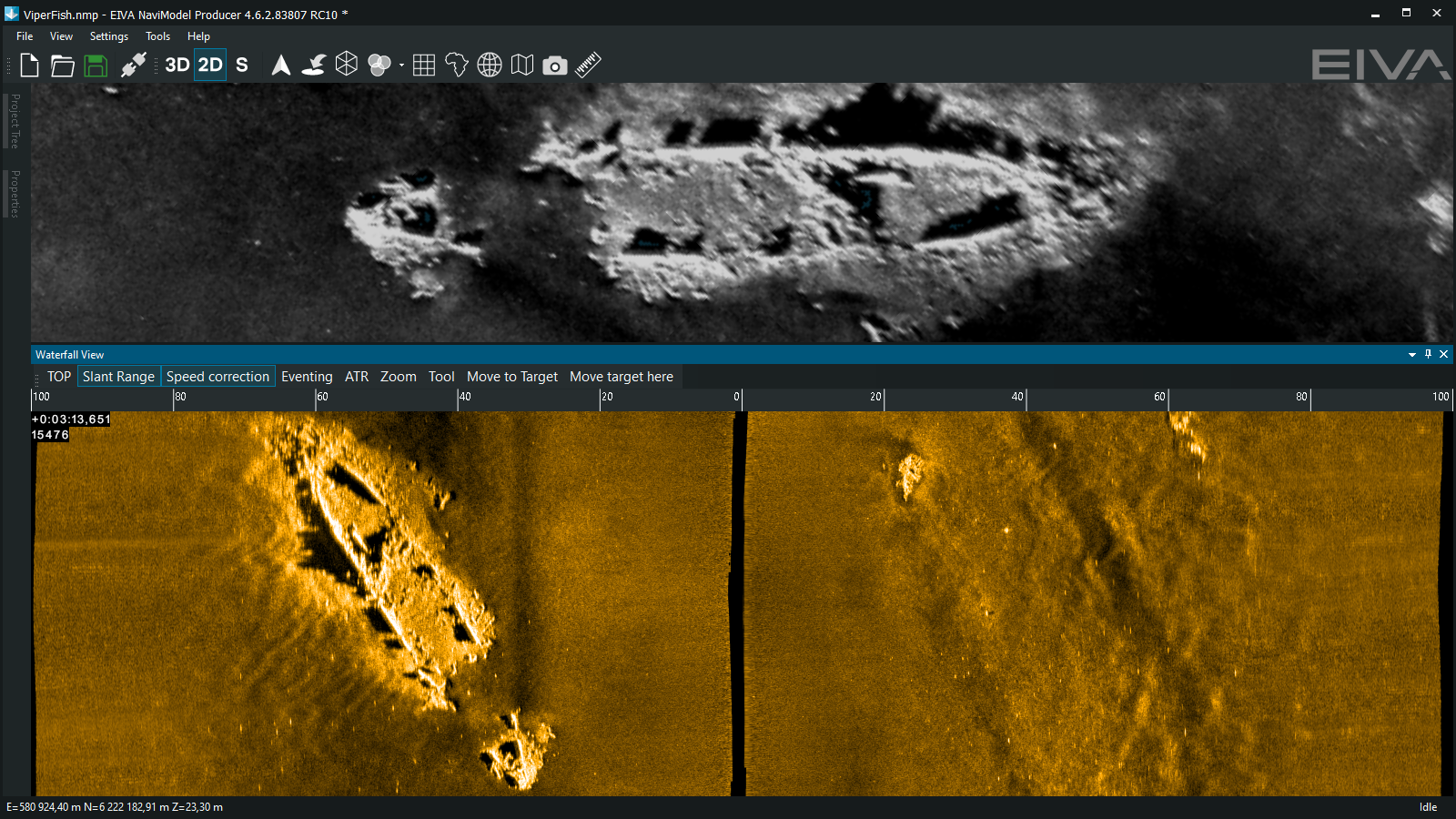
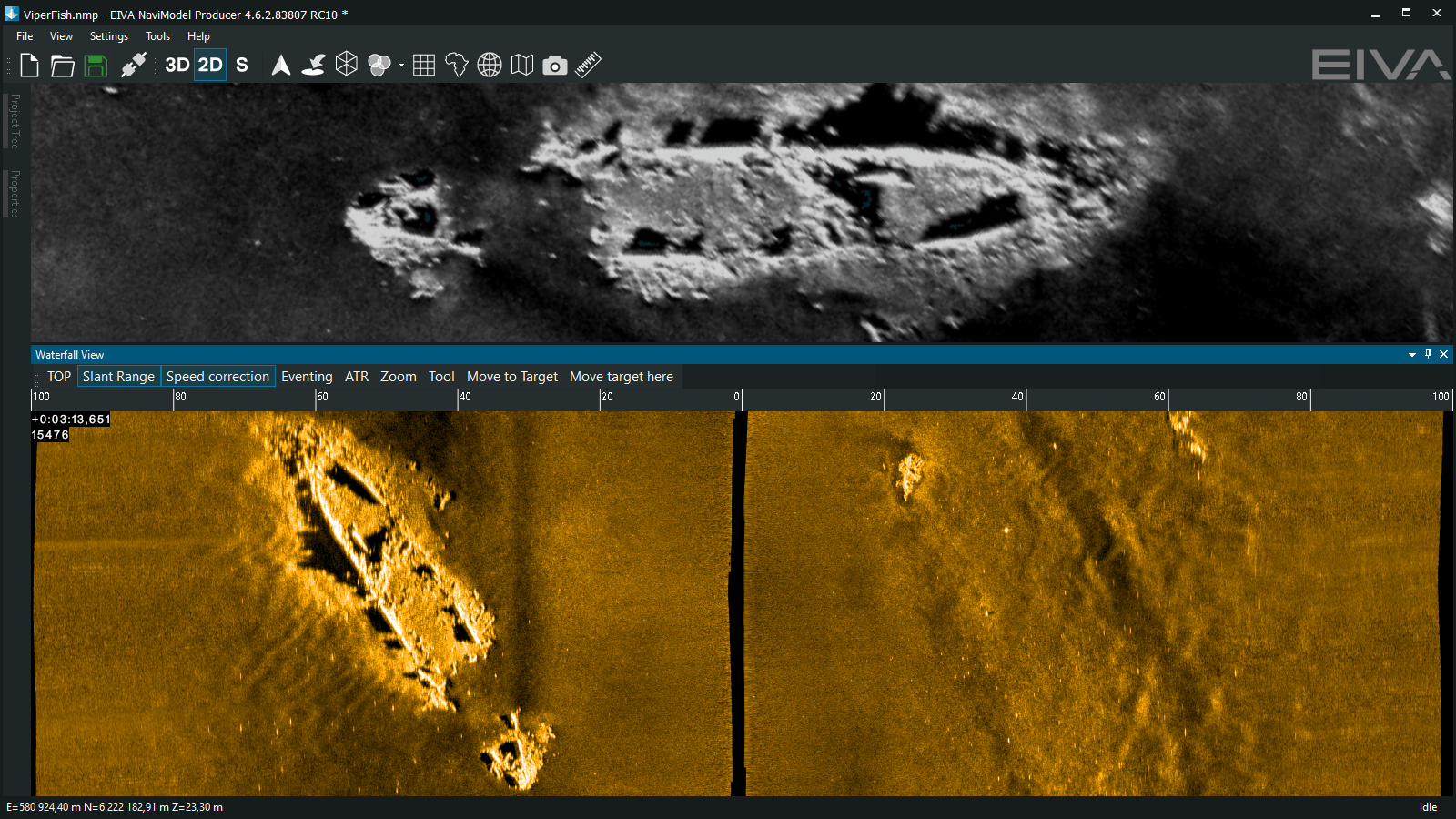
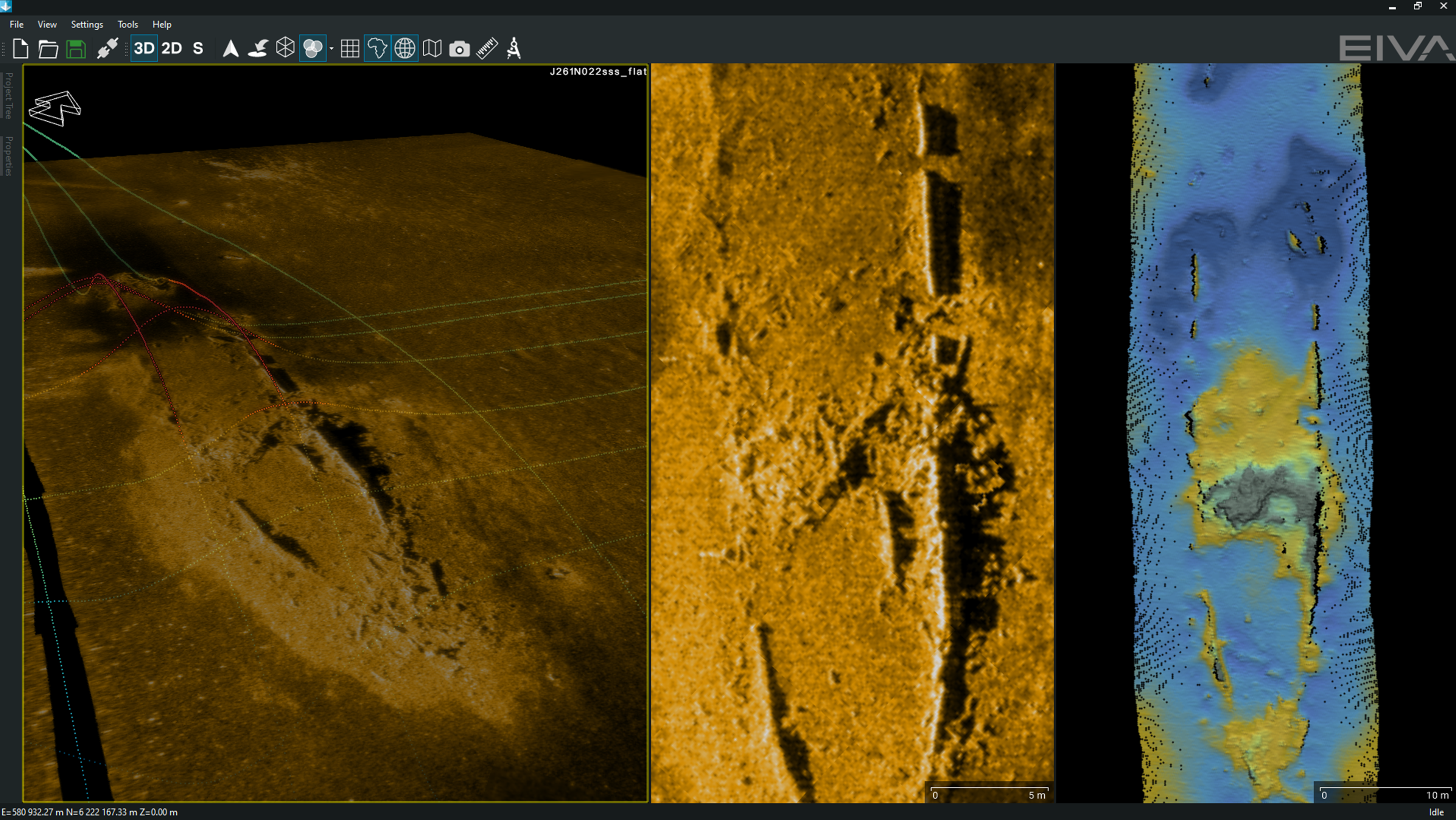
A shipwreck surveyed with ViperFish ROTV, data displayed is MAS & RM Hypermag (left), MAS (center) and MBES (right)
-
Avoid obstacles more smoothly than ever
This autopilot flight mode uses your vessel’s echo sounder data as an early warning system to avoid obstacles while keeping sensors stable.
Vessel-Aided Terrain Follow mode
Avoid obstacles more smoothly than ever through automated real-time calculations – this flight mode uses your vessel’s echo sounder data as an early warning system to avoid obstacles while keeping sensors stable.
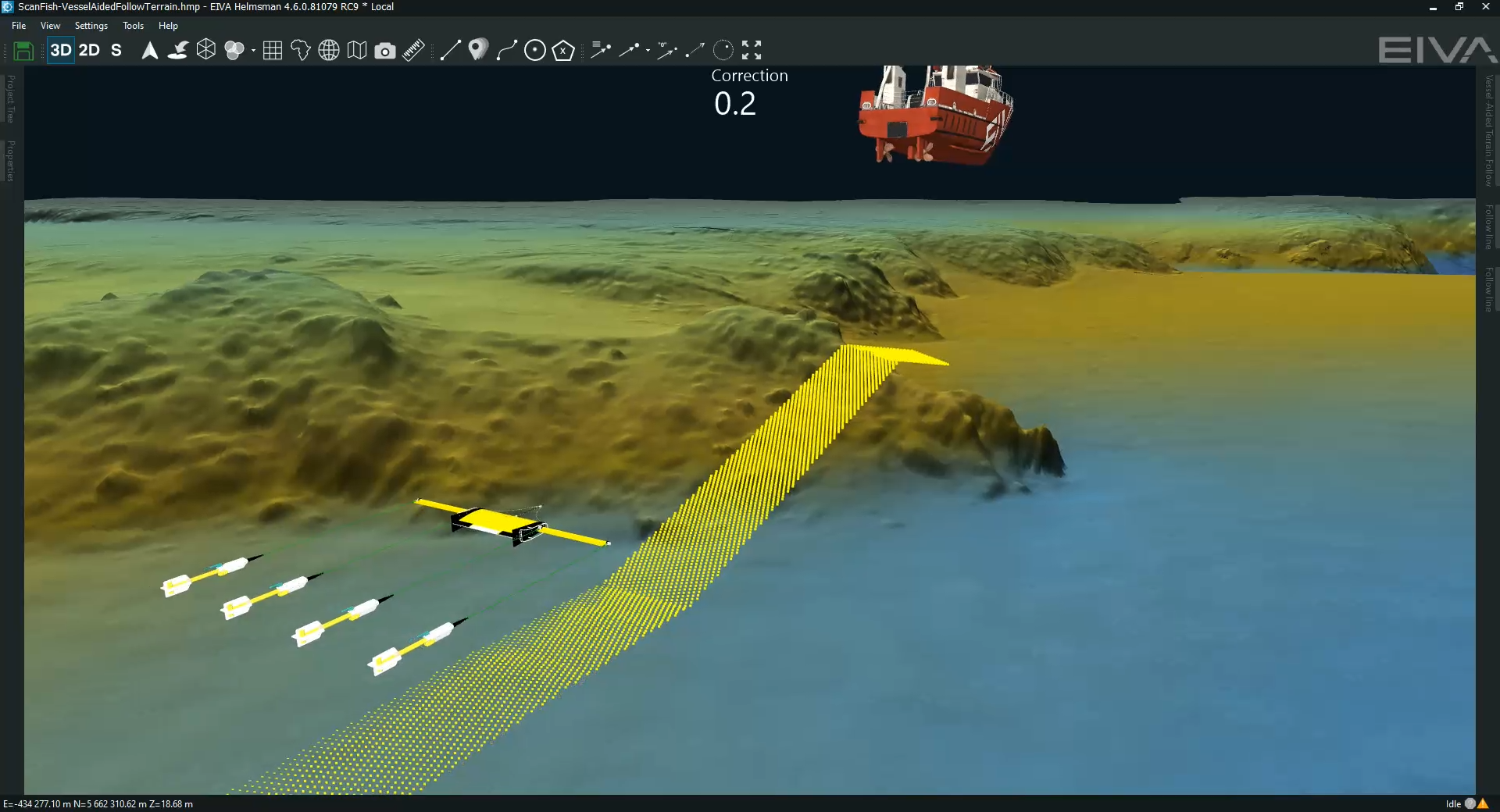
Video showing the Vessel-Aided Terrain Follow mode in action, making an ROTV avoid steep obstacles on the seabed more smoothly than it would have if it were using only the ROTV altimeter sensor for obstacle avoidance – thereby achieving stability for optimal sensor performance
The Vessel-Aided Terrain Follow mode optimises your vertical runlines based on a DTM (online and/or pre-surveyed). The main advantages are…
It ensures smooth obstacle avoidance, so your data collection isn’t disturbed by any sudden movements of the ROTV, which could otherwise occur if there is a large, steep obstacle, such as a boulder. This is because the altimeter sensor onboard the ROTVwould register the obstacle when closer to it, causing the ROTV to move quickly out of the way to avoid it. On the other hand, with the Vessel-Aided Terrain Follow mode, the ROTV can react ahead of time thanks to an early warning from the DTM, and therefore you have the option to make it do avoid obstacles more smoothly over time.
You minimise risks to your ROTV by not only reliably predicting obstacles and avoiding them (as the ROTV already does) but also customising how you avoid them, so your ROTV’s vertical steering is tailored to your specific ROTV configuration (with this new mode, you can customise the area in which obstacles are avoided and the slope with which the ROTV avoids them.
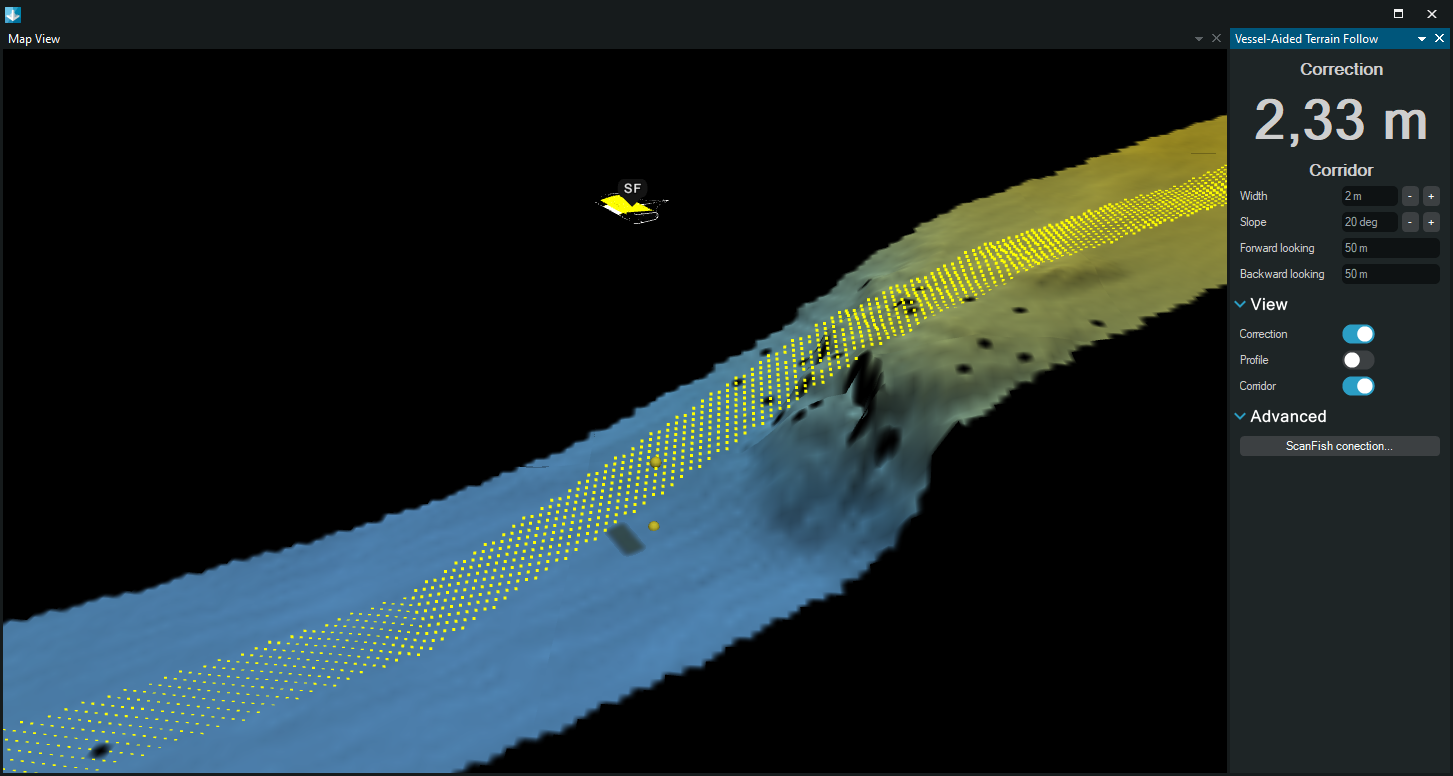
The area highlighted in yellow is the corridor in which objects are considered relevant obstacles to be avoided using the Vessel-Aided Terrain Follow mode – and the two yellow spheres below the ScanFish model show the correction to the vertical route
Stay safe with a failsafe
This new steering mode is doubly designed to avoid any harm to your ROTV. The EIVA team has equipped it with a failsafe function for the unlikely case of a malfunction in the setup causing your ROTV to receive erroneous data from the synthetic altimeter calculated by NaviPac. An error in the synthetic altimeter can occur for example if you are using a pre-surveyed DTM which is outdated, as a new obstacle has appeared since then. In such a case, the priority will always be given to the minimum height registered by the altimeter mounted on your ROTV.
Easy integration with your ROTV
This automated steering mode is available for all EIVA ROTV systems. In addition to your vessel and any model of EIVA ROTV, this steering mode uses the following components…
- Multi-beam echo sounder on the vessel which is towing the ROTV (optional as you can alternatively use pre-surveyed DTMs):
- Acquires seabed data to create a real-time DTM
- NaviSuite Kuda Pro, EIVA’s hydrographic survey software solution (alternatively, if using a pre-surveyed DTM, you can use NaviPac Pro or NaviPac Single User):
- Collects multi-beam echo sounder data and creates a DTM in real time – or displays a historical DTM
- Calculates your ROTV’s optimal vertical route based on the DTM and your settings for obstacle avoidance
- Inputs synthetic altimeter values to your NaviSuite Flight software so you follow this route
- Multi-beam echo sounder on the vessel which is towing the ROTV (optional as you can alternatively use pre-surveyed DTMs):

.png)
Specifications
- Weight (air / water)
- 145 kg / 5 kg
- Speed
- 2-10 kt (STW)
- Depth rating
- 200 m
- Dive/climb speed
- 0-2 m/s
- Dimensions (length x width x height)
- 3200 x 1300 x 620 mm
- Diameter
- Ø315
- Fibre telemetry
- 1 Gb/s
- Target position accuracy
- Better than 1 m (DRMS)
Related products
-
Sonardyne Mini-Ranger 2
Mini-Ranger 2 from Sonardyne is a sixth-generation (6G) Ultra-Short BaseLine (USBL) underwater positioning system.
-
WSM6+ 1k Omni transponder
The Wideband Sub-Mini 6 Plus (WSM 6+) is Sonardyne’s latest generation of versatile USBL transponders/responders that support Wideband®2 signals.
-
WSM6+ 4k MF Directional transponder
The Wideband Sub-Mini 6 Plus (WSM 6+) is Sonardyne’s latest generation of versatile USBL transponders/responders that support Wideband®2 signals.
-
Equinox
Multi-aperture sidescan sonar towed with a ScanFish remotely operated towed vehicle (ROTV) for UXO operations. 3D steering lets you precisely control the flight path both vertically and horizontally.
-
ScanFish Katria 3D incl magnetometers
The ScanFish Katria 3D with magnetometers is a wide-sweep ROTV solution for time-efficient magnetometer surveys. With the 3D option, you can precisely control the flight path both vertically and horizontally.
-
OceanEnviro 4.6
The OceanEnviroTM 4.6 is a high-quality and cost-effective electrical winch for deployment of oceanographic and hydrographic equipment.
-
OceanEnviro 10.4
The OceanEnviroTM 10.4 is a high-quality and cost-effective electrical winch for deployment of oceanographic and hydrographic equipment.
-
NaviSuite Kuda Core + Processing
Unmatched software with deep feature list for shallow water data acquisition and processing – Entry-level variant – Supports multi-beam echo sounders, lasers and cameras.
€ 70.00/day€ 4,333.00/year€ 13,000.00/permanent






.png?mode=crop)

How to rent equipment from EIVA
We would be happy to help you – reach out if you have any questions about our rental products.