






Key benefits

Cutting a long computer vision story short: What you get…
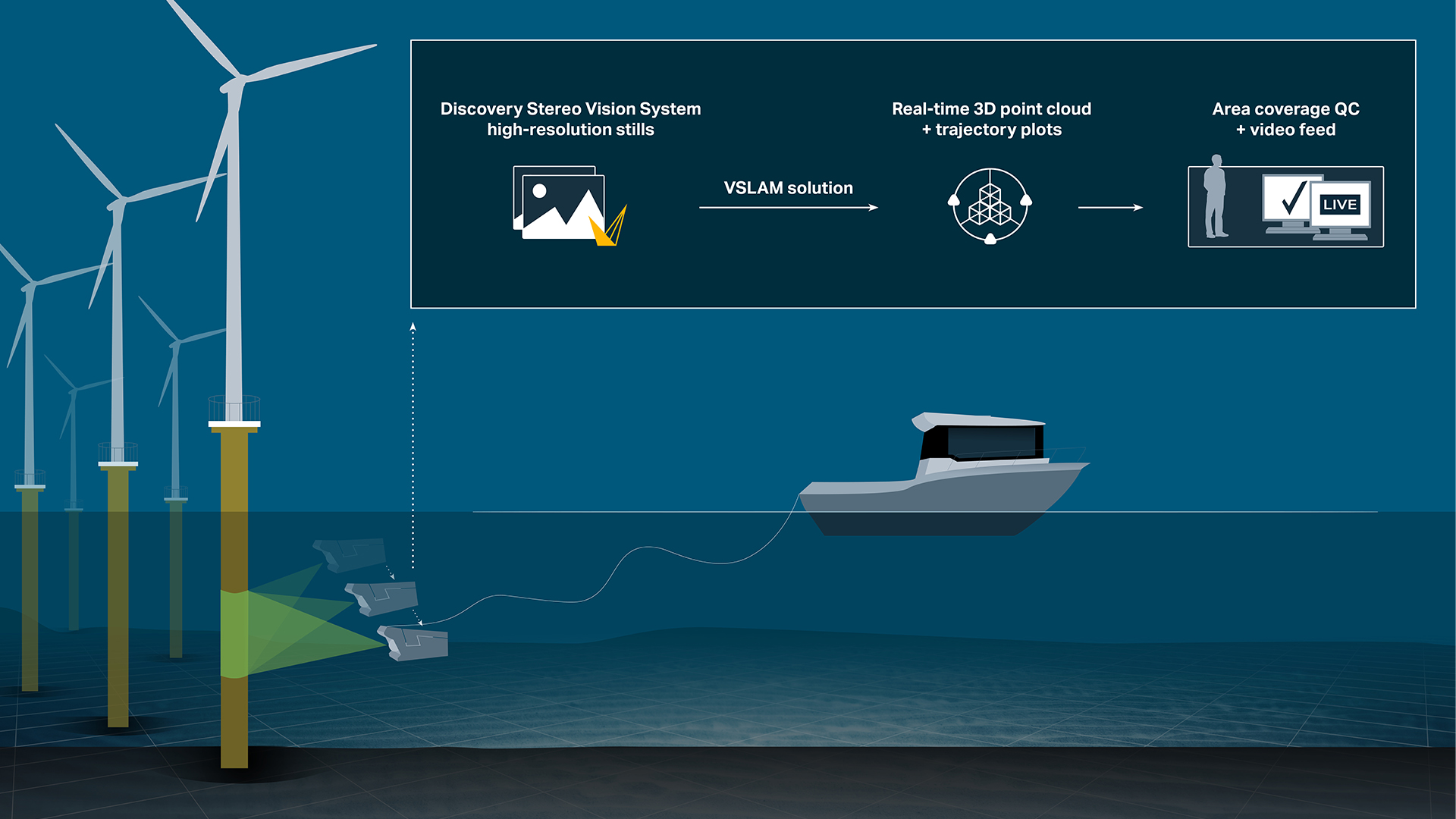
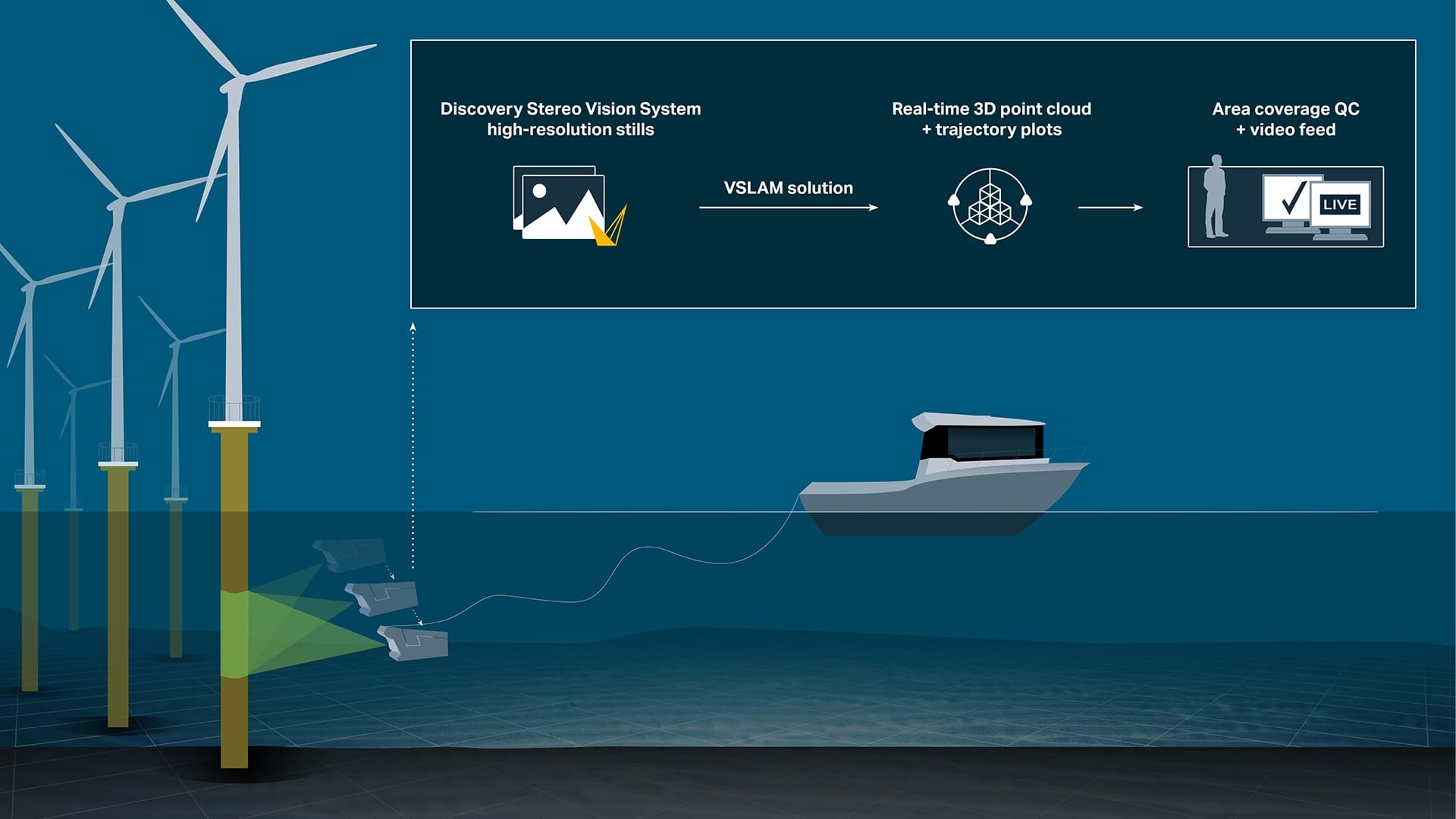
Total system solution leveraging high-resolution camera stills for optimising visual inspections.
Cutting a long computer vision story short: What you get…
Total system solution leveraging high-resolution camera stills for optimising visual inspections
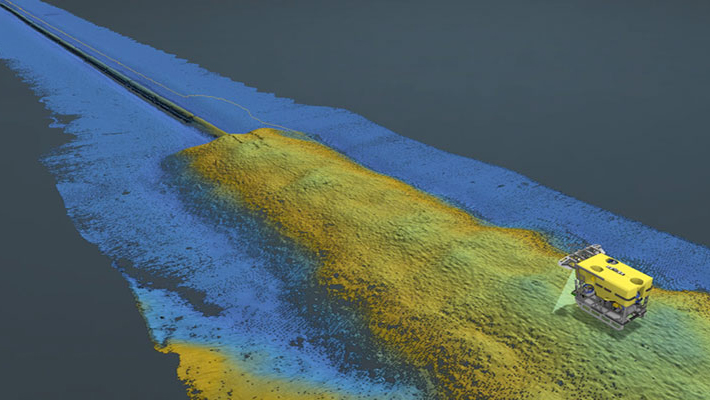
... through the synergy of Voyis’ Discovery Stereo system and the Voyis VSLAM Powered by EIVA NaviSuite softwareObtain high-quality 3D point clouds and navigation trajectory plots in real-time
… through advanced computer vision algorithms of NaviSuite VSLAMEasier pilot navigation during complex operations
… with real-time data quality control displaysMinimise the risk of incomplete or inaccurate data collection
… by monitoring real-time visual quality control displays in the intuitive, custom interface of NaviSuiteComplement navigation sensors
… thanks to situational awareness for obstacle avoidance provided by real-time 3D visualisation of surroundingsEnhance visual inspections
… by linking high-resolution stills with 3D point cloud and trajectory information – all point clouds and trajectory plots are merged together to give a full data setStreamline your acquisition workflow if you are running NaviPac software
… by viewing these real-time quality control displays within the same intuitive user interface as your navigation and acquisition controlsProduce high quality photogrammetry deliverables in a third-party application
… using the high-quality, image-enhanced 3D point clouds, which NaviSuite VSLAM and the Discovery camera generate in real timeSave on topside computational requirements
… through edge computing on your ROV with onboard processing of stills and video on the Discovery camera-
Quality control and situational awareness
Want to optimally ensure comprehensive and accurate data collection?
Quality control and situational awareness
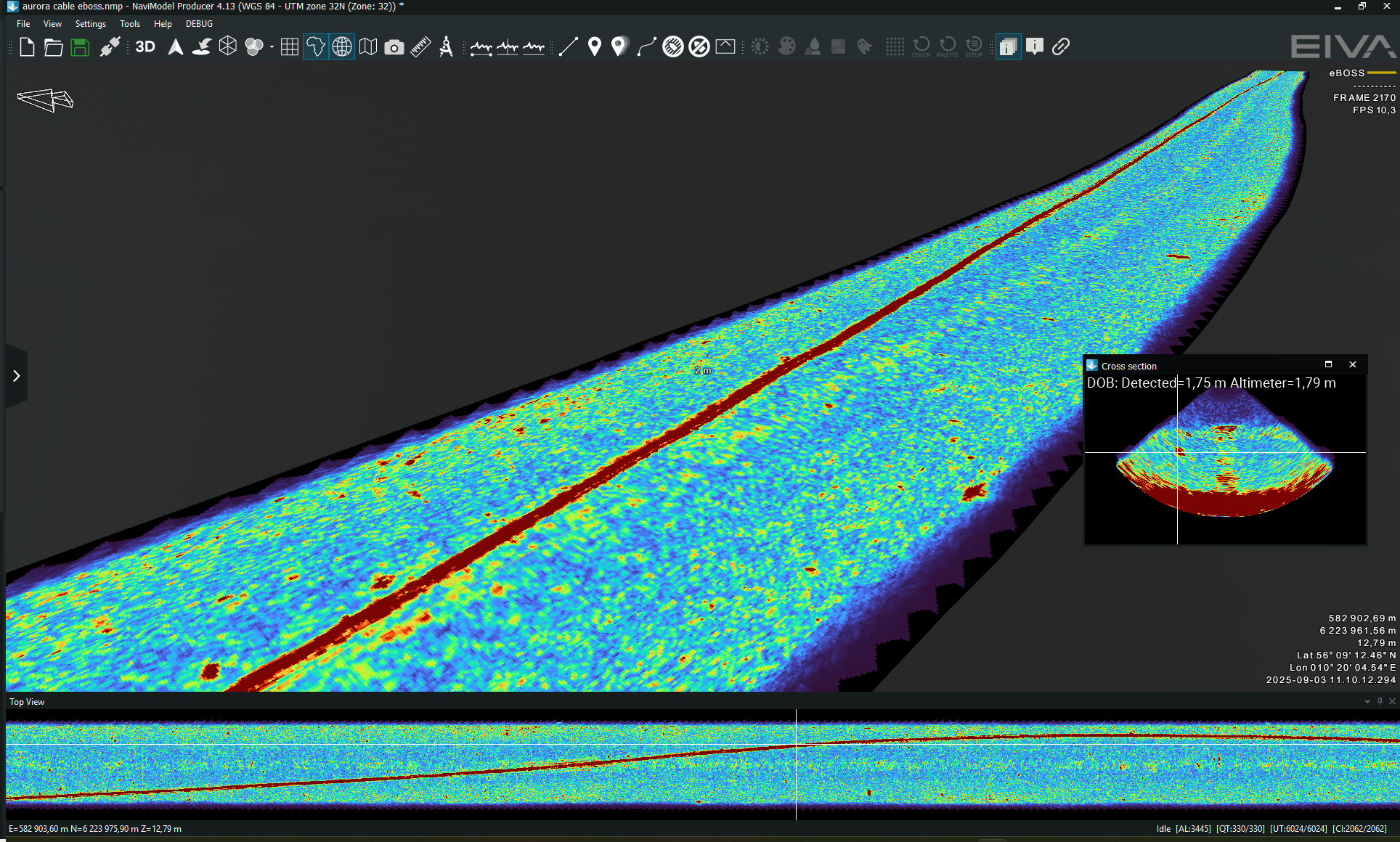
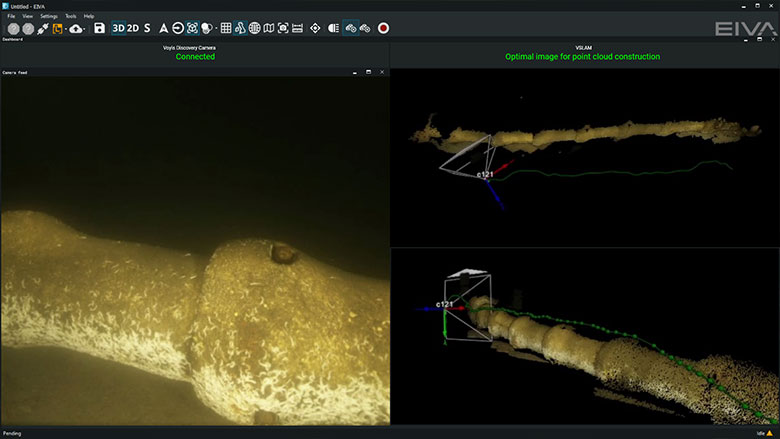
Want to optimally ensure comprehensive and accurate data collection? During visual inspections, Voyis VSLAM Powered by EIVA NaviSuite lets you display 3D point clouds and trajectory plots generated in real-time – alongside your RGB-D camera stills. With this, QC engineers can thoroughly evaluate the survey's coverage and identify any potential areas where data may be missing or insufficient. For example, if there is noise in the trajectory data or blank spaces in the point cloud, you can take corrective actions promptly, such as conducting additional scans or adjusting survey parameters.
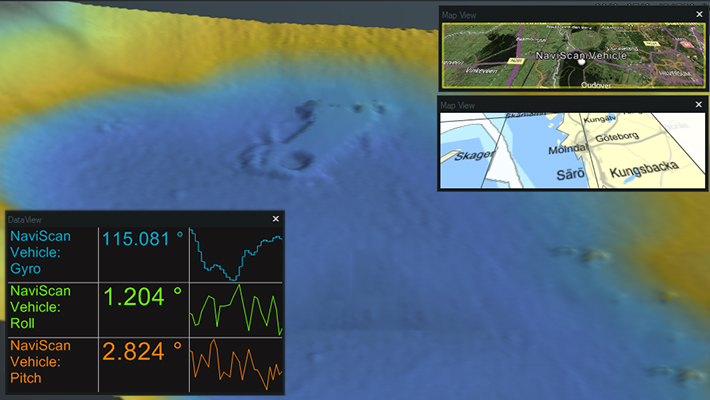
Simultaneous real-time displays of Discovery Stereo Camera stills (left) and 3D point cloud coverage display with ROV pose and trajectory plot (right)
Monitor displays in an intuitive user interface
Tailor your data display to suit your needs, whether piloting an ROV or performing quality control. You can customise the NaviSuite VSLAM software interface with several synchronised views, such as an overview map, RGB-D camera stills, video and 3D point cloud – of which you can create multiple 2D/3D views.
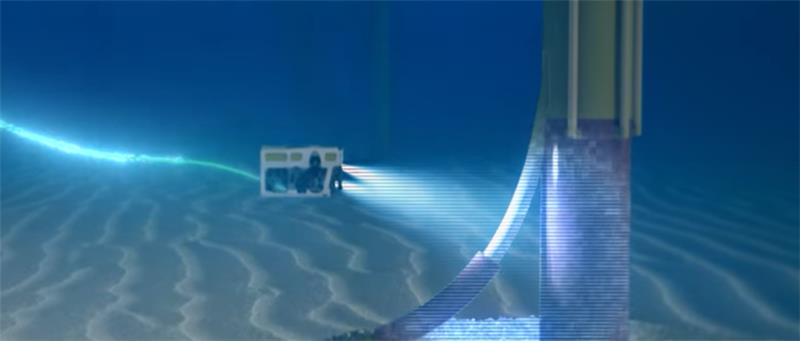
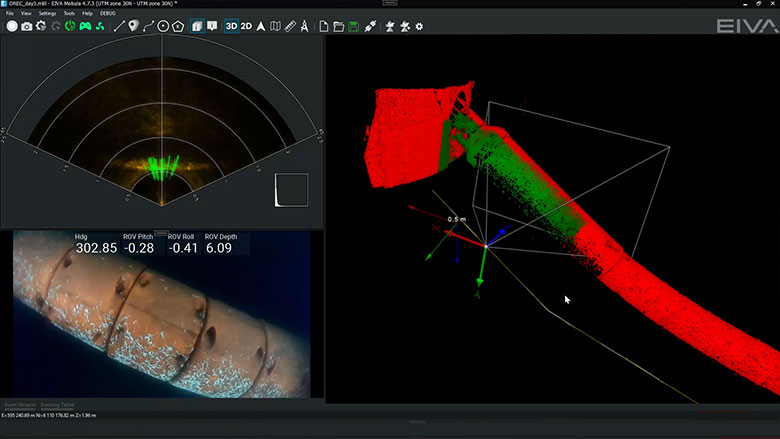
A remote surveyor scenario with Voyis VSLAM Powered by EIVA NaviSuite displays showing a monopile cable protection system (CPS) in the NaviSuite interface, including 3D point cloud generation and stills (middle bottom), quality control of area coverage with completion progress display (right bottom), ROV position in 3D model of environment (right top), video with data overlays (middle top) and a 2D navigation display (left top)
Integrate with NaviPac Pro
For an unmatched level of integration, if you are using NaviPac Pro for navigation and positioning, you can display your Voyis VSLAM Powered by EIVA NaviSuite point cloud and trajectory data in the same interface.
You can register observations, take snapshots, as well as load background maps and 3D models. Unlock this integration and many more advanced features, including quantifiable change detection, measurement analysis and touchless metrology, with a NaviSuite bundle, such as for pipe and cable inspections.
-
Integration with Discovery Stereo
Ensure high performance on a small form factor unit thanks to Voyis’ Discovery Stereo camera’s edge computing.
Integration with Discovery Stereo
Ensure high performance on a small form factor unit. Voyis’ Discovery Stereo camera’s edge computing reduces topside software computation and system latency, ensuring high-quality stills used by Voyis VSLAM Powered by EIVA NaviSuite. Camera outputs are partly processed in onboard software, yielding RGB-D images, rectified stereo pairs (aligned for ease of use in computer vision and metrology applications) and low latency video.
NaviSuite VSLAM algorithms are pre-calibrated to the camera and run directly on images as they are taken. Data is compressed before being sent to the topside computer, which greatly reduces bandwidth requirements and enables real-time video for the pilot display.
The Discovery Stereo with integrated Nova Mini Lights provides a powerful platform for all a vehicle's vision needs, delivering stills images, video, IMU data and 3D data with a data-centric DDS architecture
Specifications of the Discovery Stereo system
- 4K video stream and crisp stills images ready for machine vision and 3D reconstruction
- Real-time 3D point clouds
- Real-time image enhancement
- 250,000 lumens light output
- Camera, Dual 8MP, Colour sensor
- Lens, 5.0mm: 75°x75° field of view
- Operating Range, 0.5m to 5.0m
- Depth Rating, 4000m or 300m
- Onboard Processing: Image undistortion, colour & lighting correction, 3D point clouds
- Data Outputs: Raw & Processed Images, Video, IMU data, 3D Point Clouds
Learn more on Voyis.com
-
What is VSLAM?
Learn more about this computer vision technique, including how it compares to photogrammetry.
What is VSLAM?
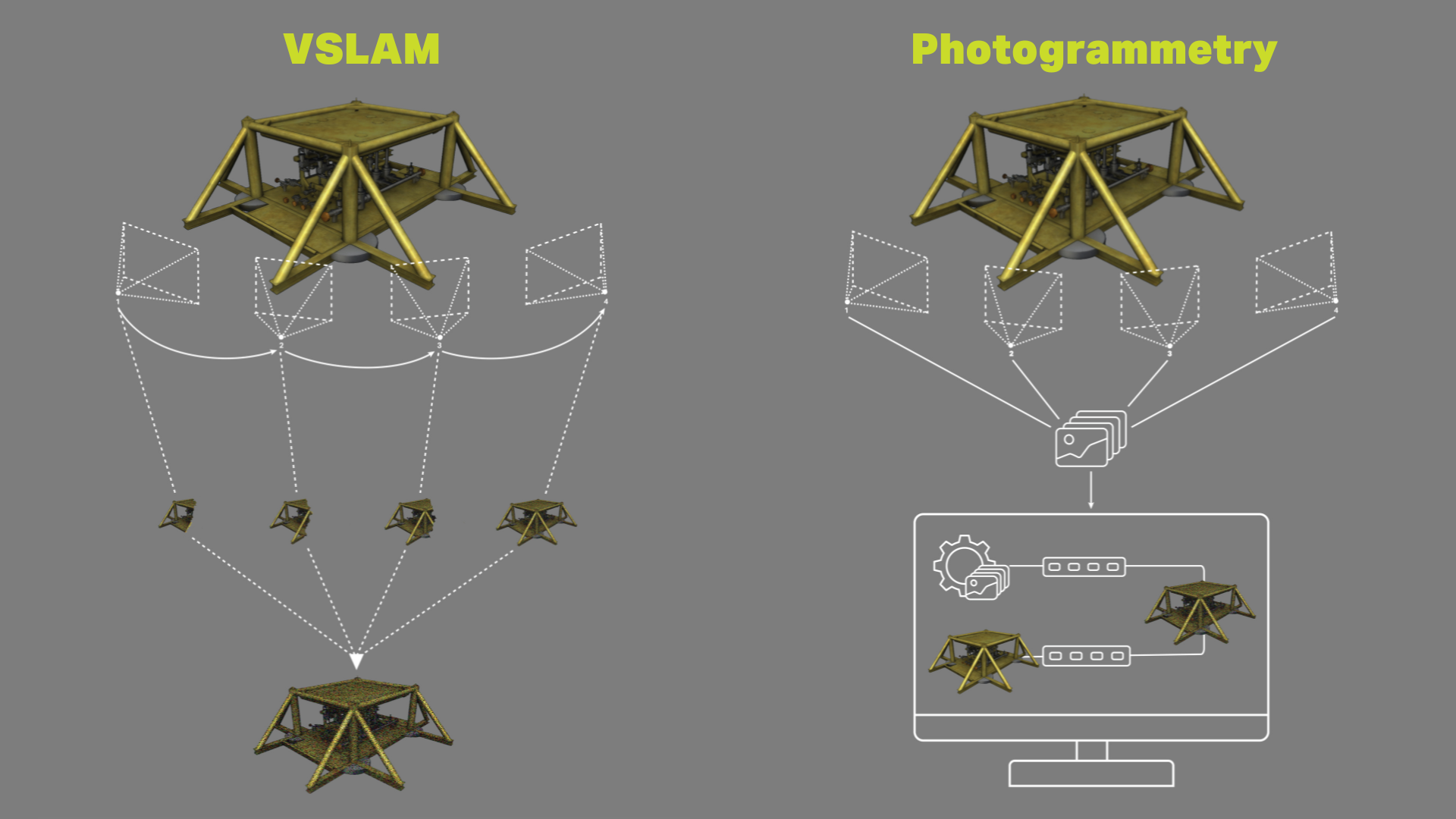
Cameras transform 3D environments into 2D visualisations, while techniques like VSLAM (visual simultaneous localisation and mapping) and photogrammetry take those 2D visualisations and turn them into digital 3D representations, such as point clouds or 3D textured mesh models. The ability to generate 3D reconstructions, or digital twins, is a game changer when inspecting critical assets such as those in offshore energy or civil infrastructure.
Subsea 3D digitisation from camera: VSLAM vs photogrammetry technologies
A notable difference between the two techniques is that photogrammetry can only be performed after data collection is complete, while VSLAM performs 3D digitisation at the speed of acquisition. This means that by leveraging VSLAM, tools available commercially such as Voyis’ Discovery Stereo vision system give users peace of mind that optimal data coverage has been achieved, while offering increased situational awareness of the subsea environment – when the user is running Voyis VSLAM Powered by EIVA NaviSuite.
How the VSLAM algorithm works
Voyis VSLAM Powered by EIVA NaviSuite estimates the camera's position by analysing consecutive input frames and finding matching key points to determine camera movement between poses. It leverages previous trajectory knowledge to enhance estimations. It detects loops in camera movement and optimises previous poses for improved accuracy.


Related products
-
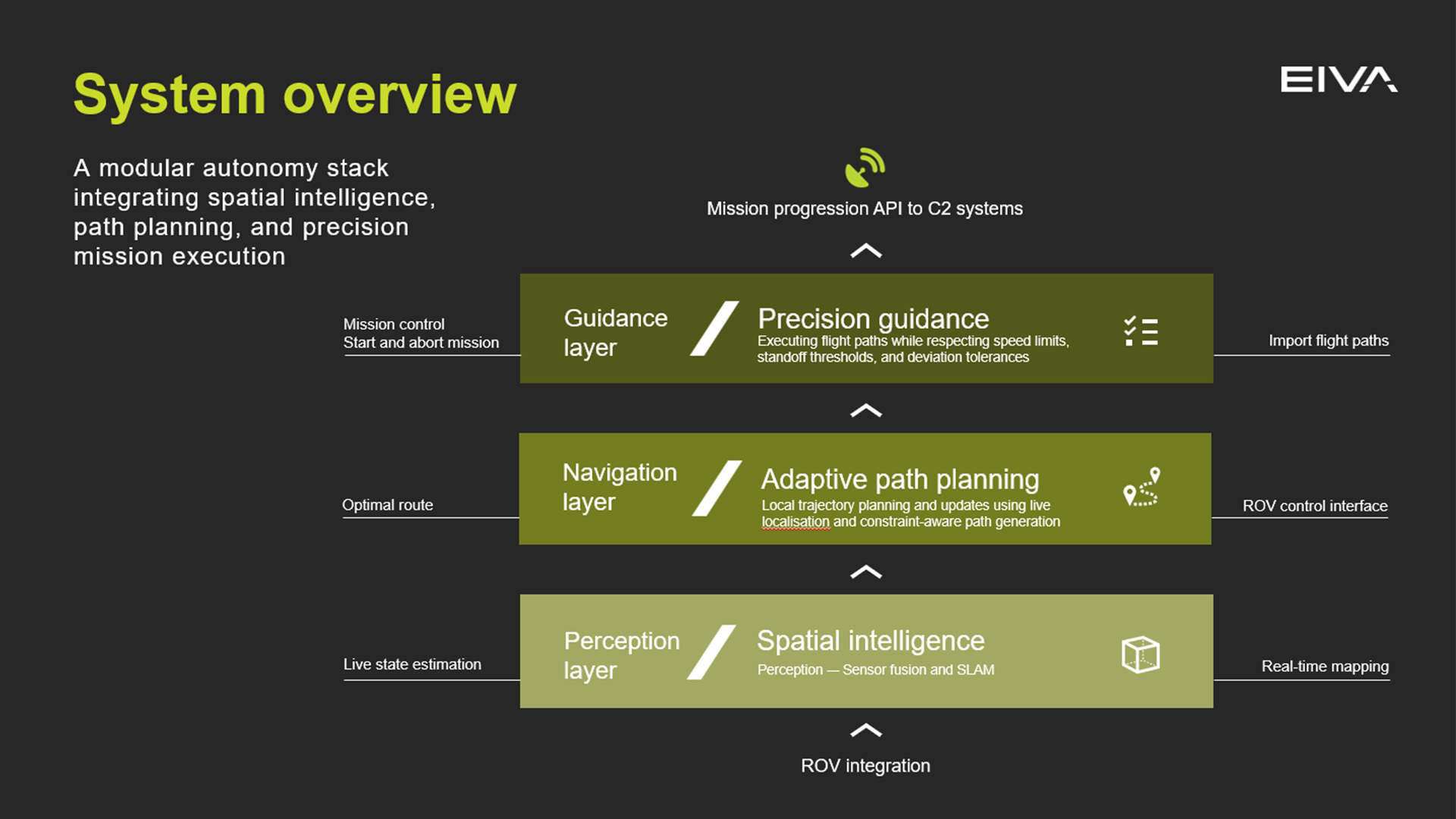
NaviSuite ROV Autonomy
Supervised ROV autonomy for safer, more consistent inspection, maintenance and repair tasks – Automated stand‑off for near‑asset inspection – Waypoint following and velocity control at the guidance layer – Sensor‑ and vehicle‑agnostic for mixed‑fleet operations.
-
NaviSuite Nardoa
Advanced 3D pipeline & cable route inspection software for data acquisition and processing.
€ 291.00/day€ 17,983.00/year€ 53,950.00/permanent -
NaviPac Pro
The most elaborate NaviPac variant for navigation information and positioning calculations.
€ 115.00/day€ 7,100.00/year€ 21,300.00/permanent -
NaviModel Producer
Full software solution for data processing, cleaning, modelling and reporting.
€ 81.00/day€ 5,008.00/year€ 15,025.00/permanent