






Key features and benefits

General visualisation tools
NaviModel and NaviPac share the same 3D engine, and therefore the same powerful 3D visualisation features. Data can be visualised in 2D, 3D, side view or by time.
General visualisation features
NaviModel and NaviPac share the same 3D engine, and therefore the same powerful 3D visualisation features. Data can be visualised in 2D, 3D, side view or by time.
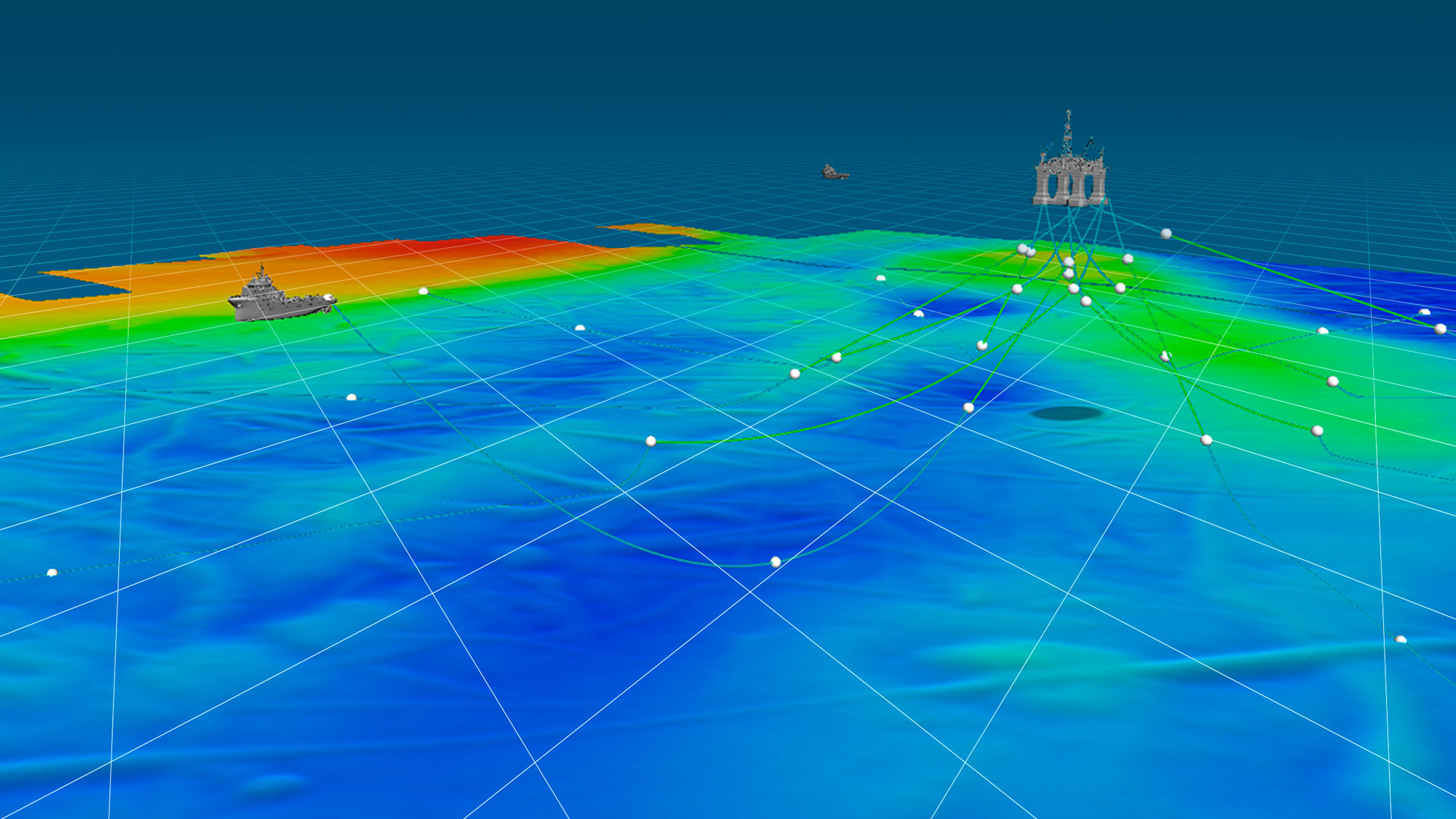
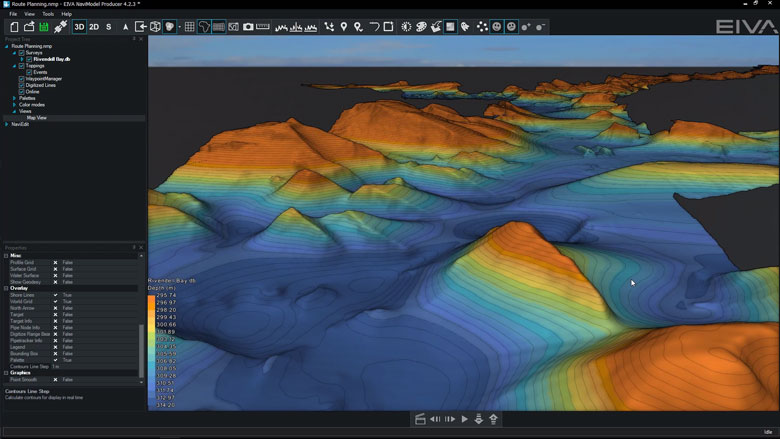
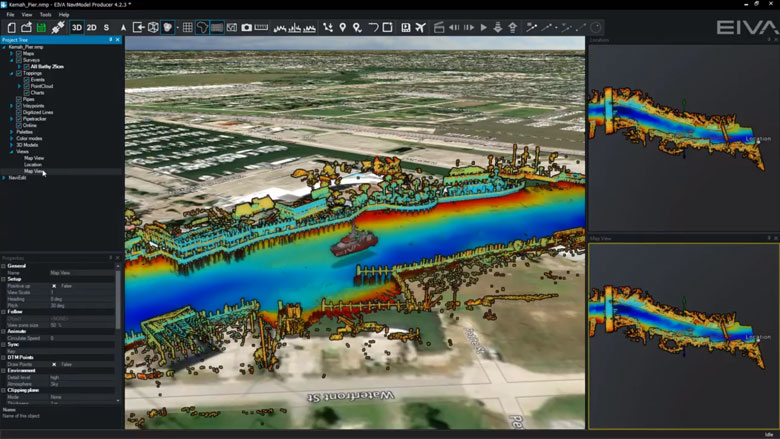
3D seabed terrain
Seabed terrain can be visualised in a 3D environment.
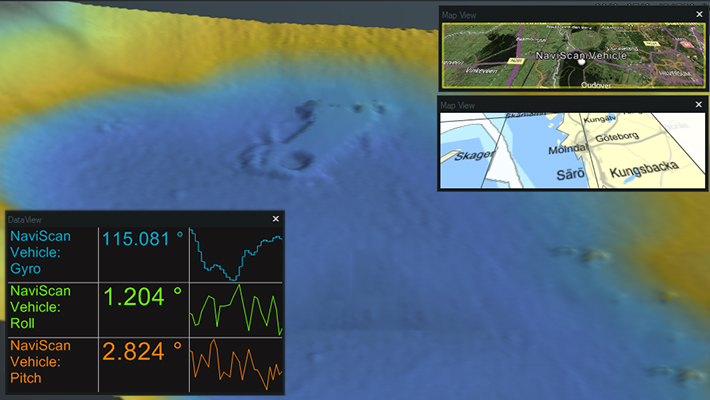
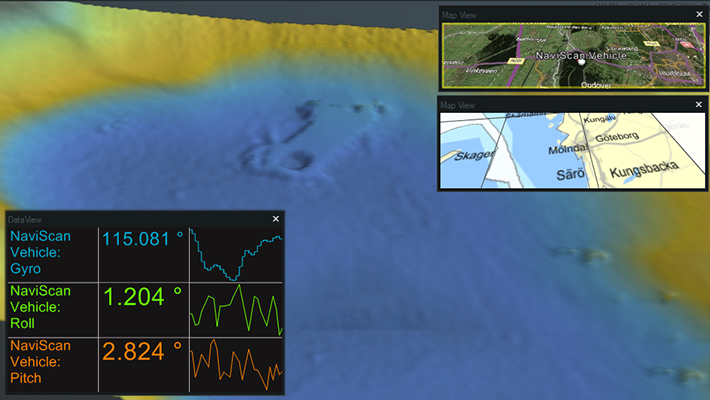
Multiple Map Views
Multiple Map Views are available. Each individual Map View window can be configured separately to display only the information required.
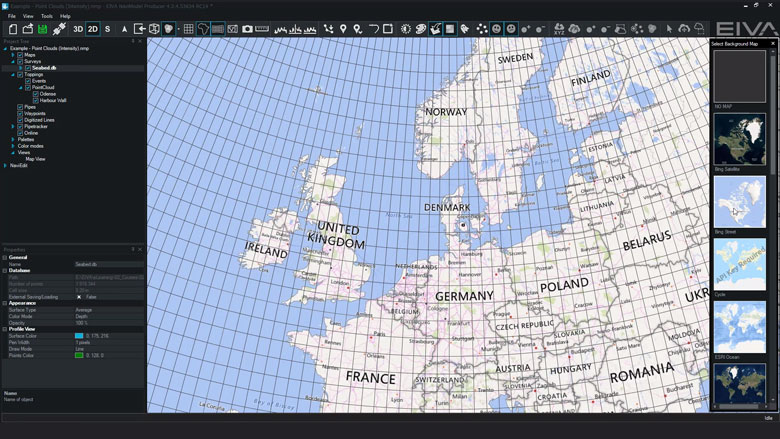
Background Maps
Background Web Map Service (WMS) maps can be displayed.
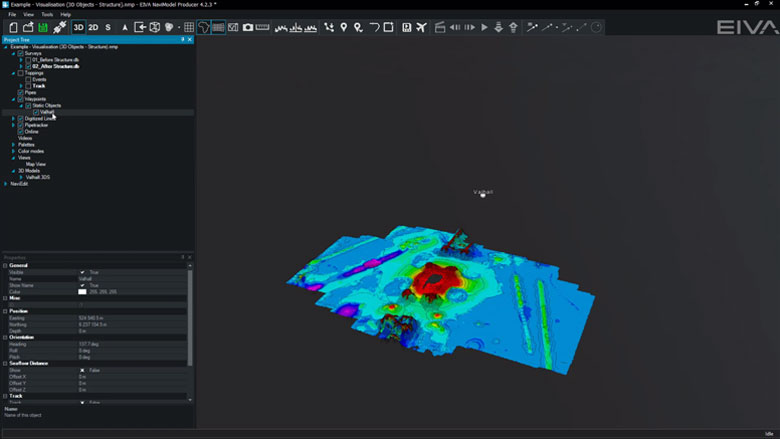
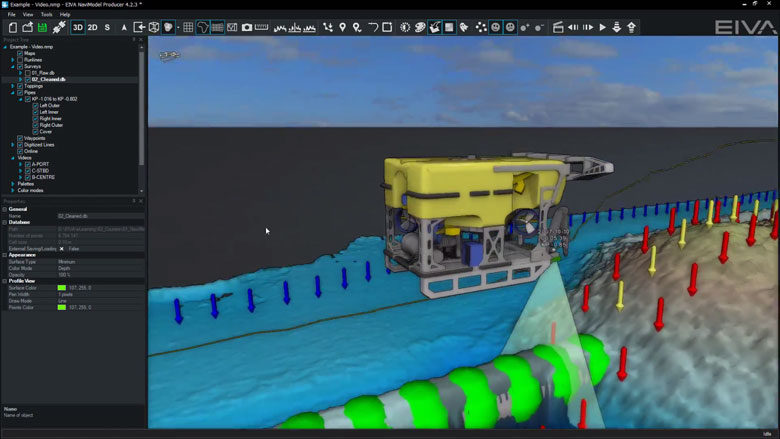
Import 3D models
3D models can be imported into NaviModel (drag and drop into the Map View window).
Link 3D models to live objects
3D models can be linked to any live objects (Vessel, ROV, Scanfish etc).
2D, 3D and side-view displays
2D, 3D or Side views allows the user to quickly change the view facilitating better data interpretation.
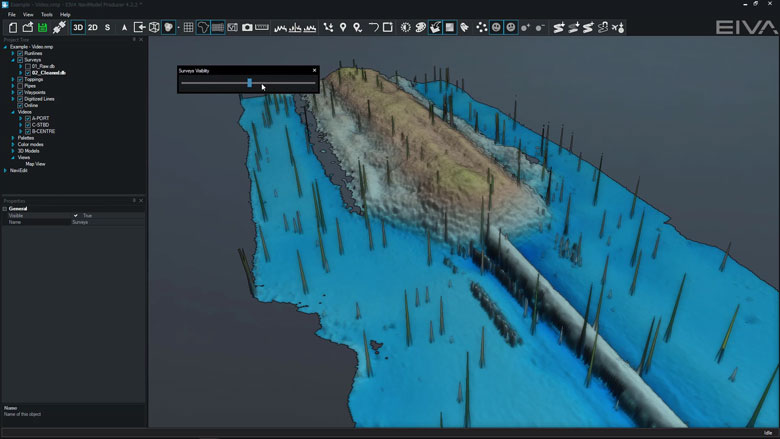
Visibility Slider
Visibility slider allows users to compare different DTM’s quickly. This enables comparison over time or between different data processing methods.
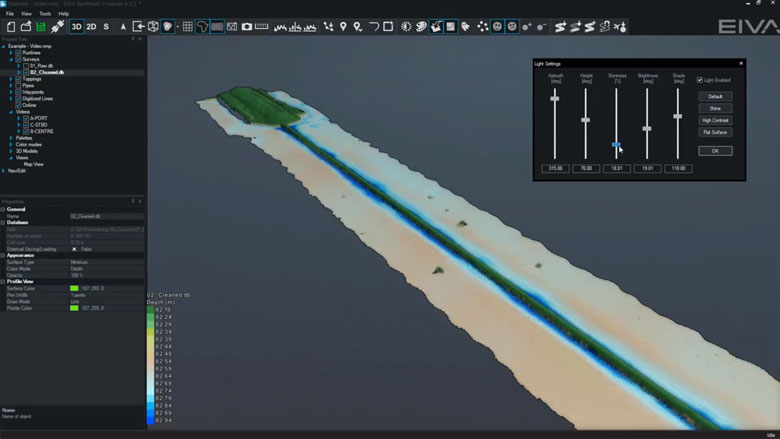
Control colours, lights, details
DTM light and palette settings can be changed at any time.
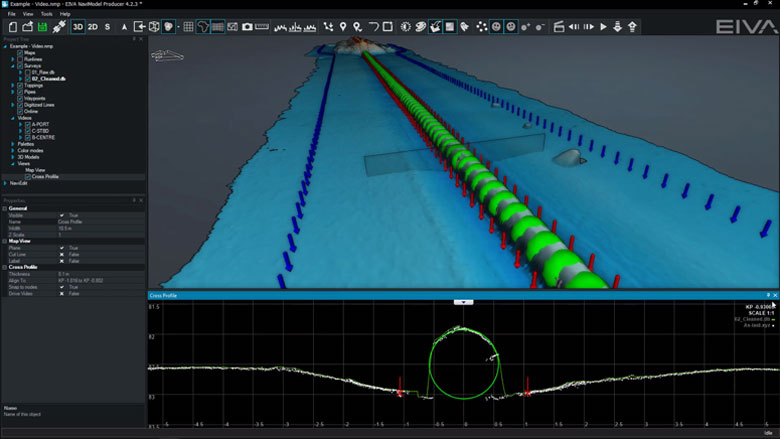
Profile views
The following profile views are available:• Cross Profile• Long Profile• Quick Profile• X & Y Axis Profile• View Profile
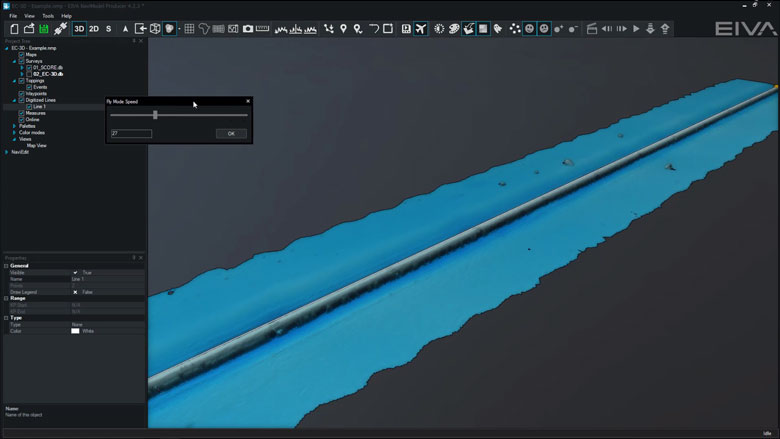
Create fly-through videos
Fly-through videos can be created for project or promotional presentations.
-
Navigation and routes
NaviPac is an integrated navigation and data acquisition software solution that includes surface and subsea navigation, route and waypoint planning, live tracking and piloting.
Navigation and routes features
Navigation and data acquisition are integrated in this software solution. Efficiently and easily navigate surface and subsea vessels using intuitive tools to plan routes and waypoints, track or pilot a vessel and more.
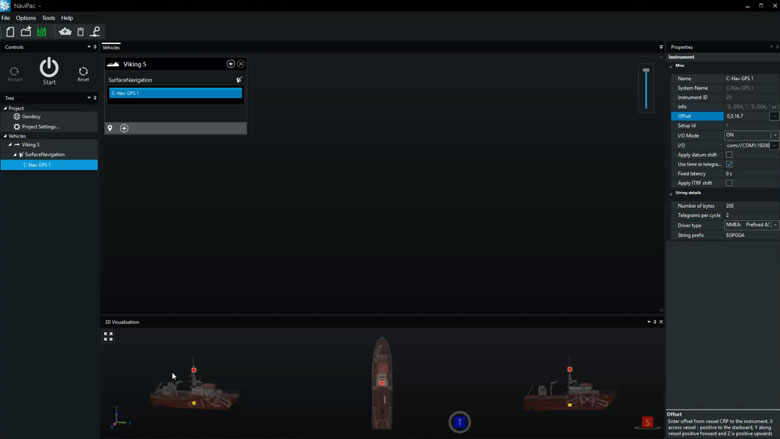
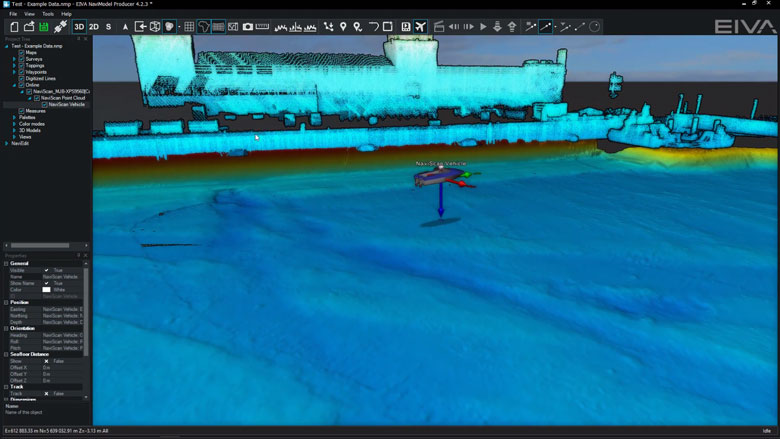
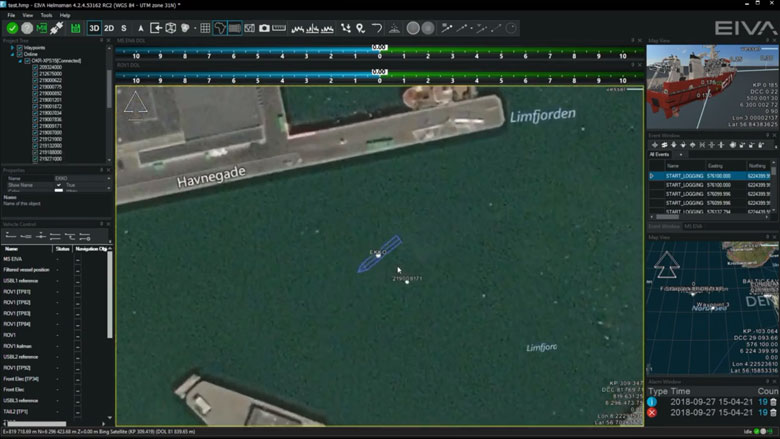
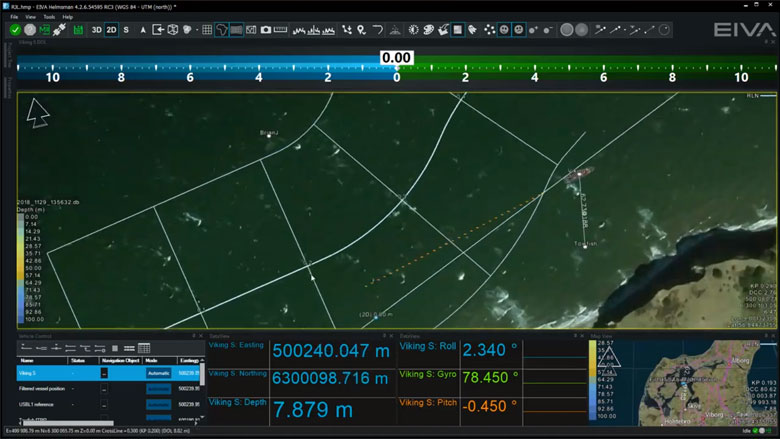
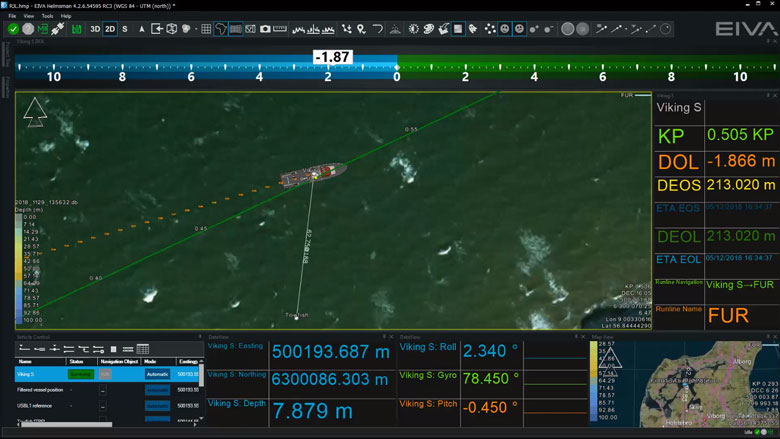
Display live position of a vehicle
NaviSuite supports display of vehicle data based on the NaviPac data feed. You can display the main vessel along with one subsea vehicle, such as an ROV or ROTV, on an unlimited number of local and remote displays. The data can be shown graphically in multiple map views.
AIS tracks
NaviSuite supports integration with AIS receivers. The data can be shown in a dedicated AIS window and overlaid in the NaviPac window. You can perform, read and utilise vessel dimension information.
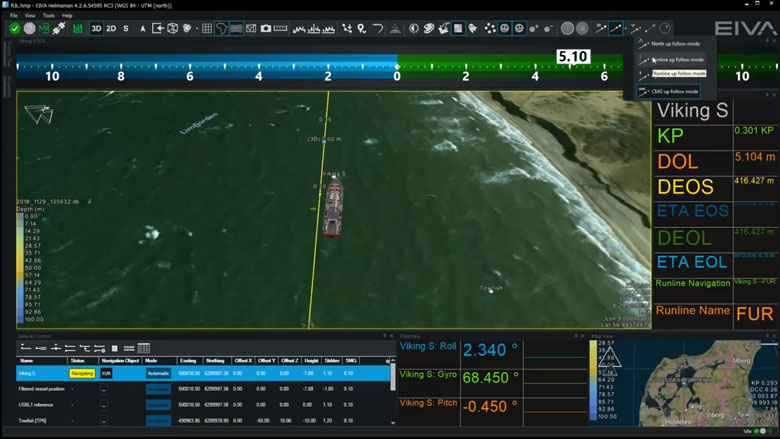
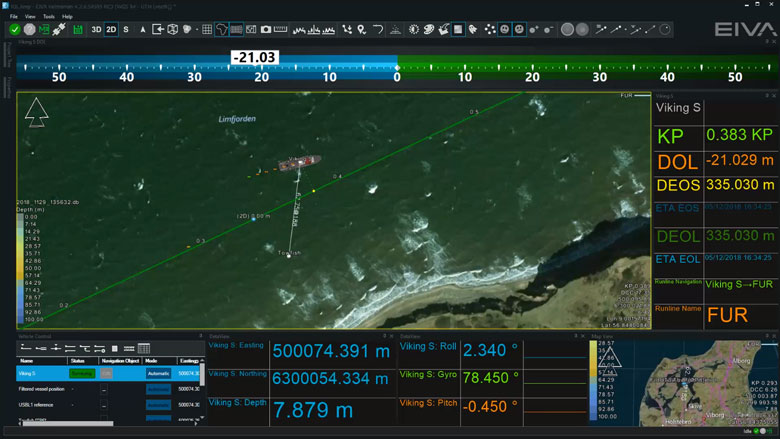
Display north-up, heading-up, route-up
Each Map View can be designed and controlled individually when it comes to content, overlays and layout. Map Views can be 2D, 3D or side-views, and orientation can be user defined, north-up, vehicle up or line up.
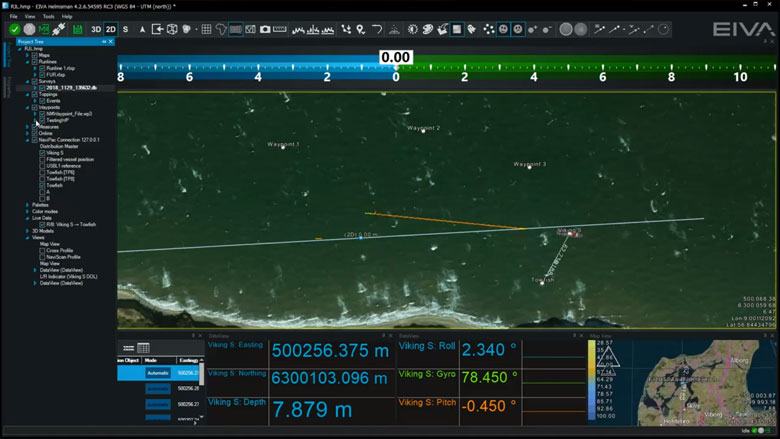
Manual waypoint drawing
NaviSuite supports a series of runline and waypoint formats including our own RLX/WPT format, ad generic ASCII readers. You can also draw lines and points directly in the Map View.
Various runline patterns (parallel, cross, star)
You can inherit multiple lines based on the base line defined, such as parallel or cross lines to get an optimal route plan.
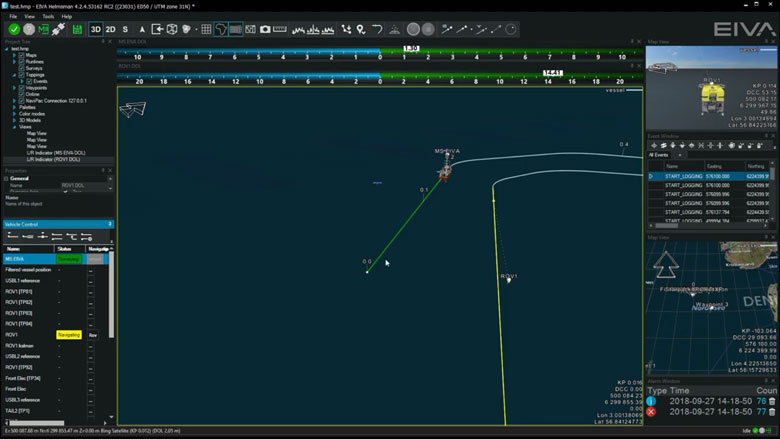
Vehicle control panel for multiple vehicle runlines and display DOL
Assignment of lines and waypoints are handled through the dedicated Vehicle Control view, as you may control multiple vehicles simultaneously. Each controlled vehicle will be available as distance offline indicator (DOL/DCC) and various runline information (along line, target ETA etc).
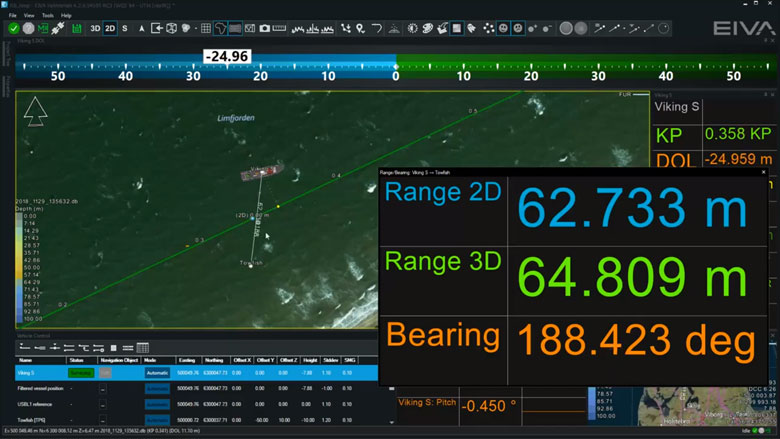
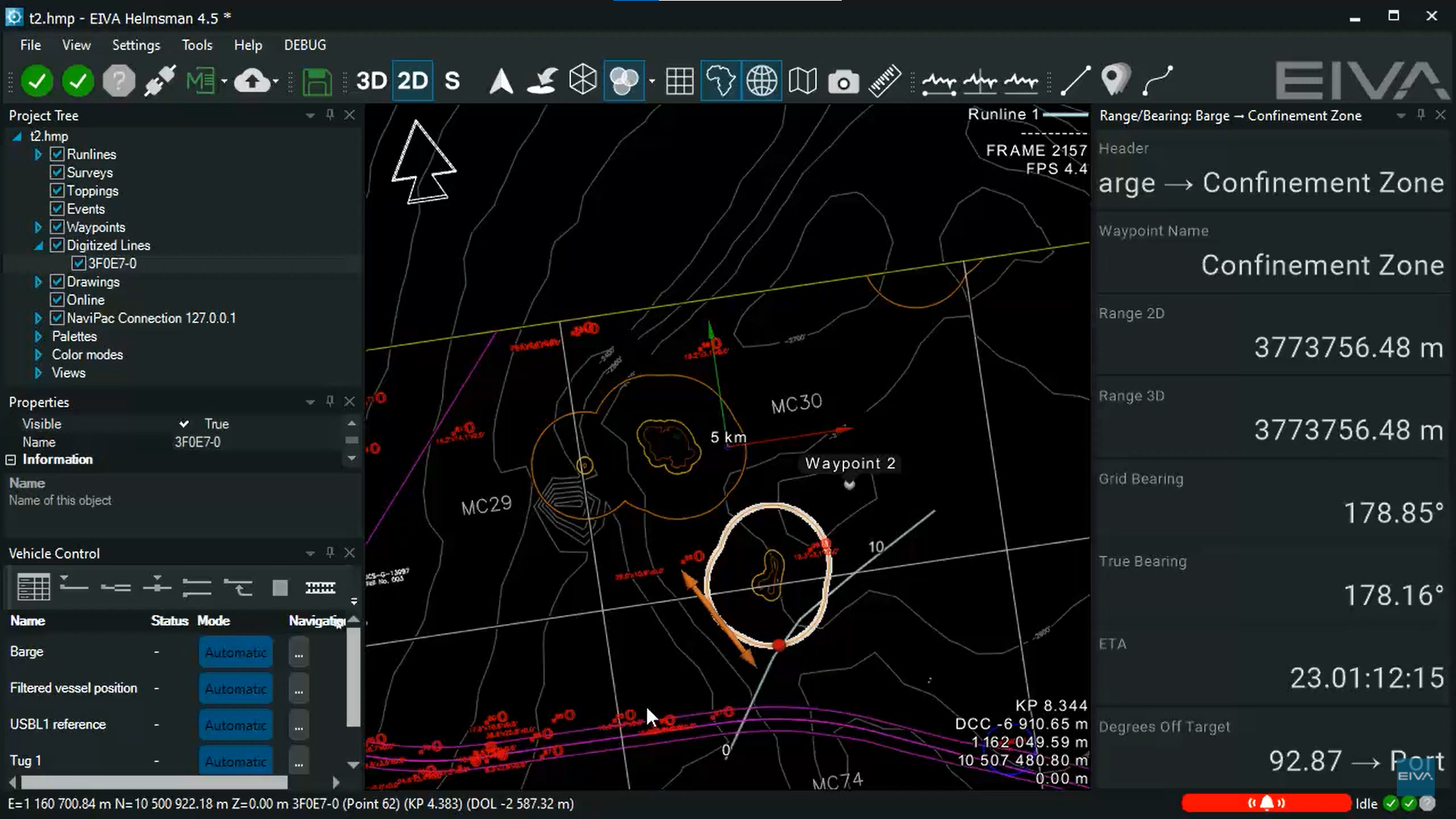
Distance to waypoint
Waypoints are handled in a similar manner to runlines, as assignment of the waypoint is done in the Vehicle Control View. Hereafter, an artificial runline is created from the vehicle to the point and NaviPac monitors the range/bearing to the destination. and can a,.o. feed that into autopilots and DP systems.
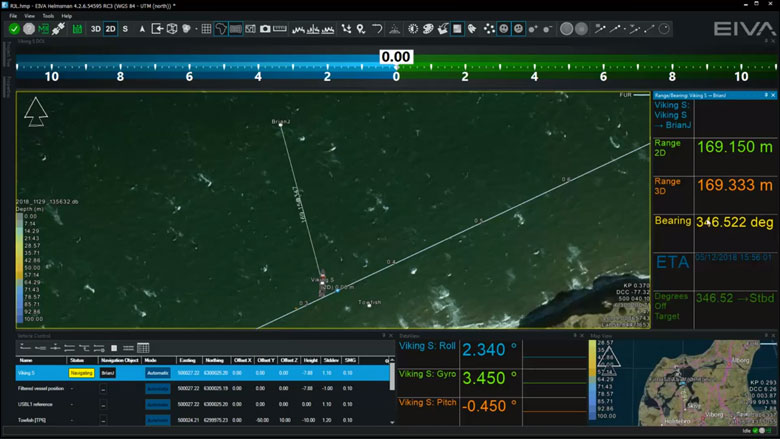
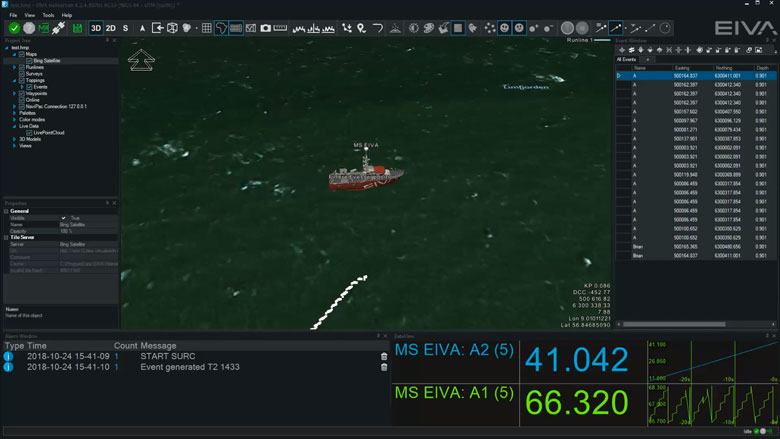
Multi-object live range/bearing
In NaviSuite, you may pair live vessels and monitor the range/bearings between them for online display as live data and range information on Map Views.
Auto-pilot (NMEA) control
When using runlines and waypoints you may connect NaviPac to autopilot systems using e.g., standard NMEA formats and pass cross-track error and destination waypoints on to the equipment.
DataUnits
NaviSuite supports use of other data units in addition to metric. The unit is selected in the project settings and all definition fields are then assumed to be in the selected data unit.
NaviSuite will follow the selected data unit, but you may, by using a simple keystroke, toggle between metric and data unit if required.
Data recording will still be metric to guarantee data integrity, but data outputs can be selected freely.
-
Sensor interfacing and recording
Many different sensors can be interfaced and integrated in both NaviScan and NaviPac.
Sensor interfacing and recording features
Many different sensors can be interfaced and integrated in both NaviScan and NaviPac.
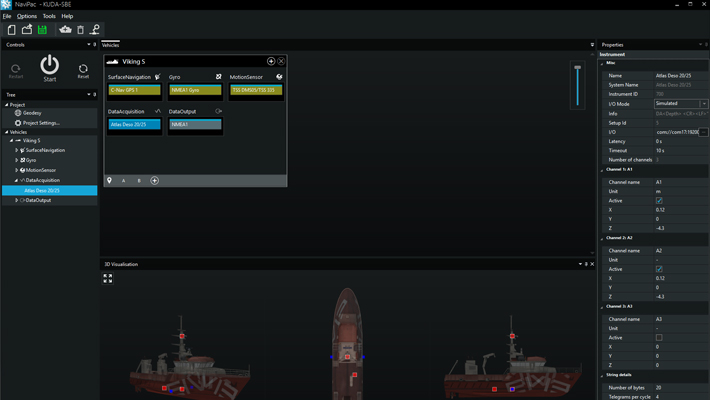
Surface positioning and motion (GPS, Gyro, IMU)
Setting up an entire vessel based project in NaviPac is easy performed using intuitive graphical definition tools. The video covers basic project definition, geodetics and vessel navigation setup.
SBE - single beam echo sounder
Single beam echo sounders and other single source data suppliers can easily be interfaced in NaviPac, either via standard drivers or enhanced user-configurable drivers. Data will be available for display in both Helmsman’s Display and DataMon. Single source data can be shown as points clouds in the HMD – and you can automatically derive DTMs out of it.
-
Sensor processing
NaviEdit can be used to recalculate data very quickly and where our sensor processing takes place. Here we change offsets, C-O’s, mounting angles, apply tide, apply SVP, de-spike sensors, improve object positioning, Kalman filtering, remove swell etc.
Sensor processing features
NaviEdit can recalculate data very quickly and where sensor processing takes place. Here we change offsets, C-O’s, mounting angles, apply tide, apply SVP, de-spike sensors, improve object positioning, Kalman filtering, remove swell etc.
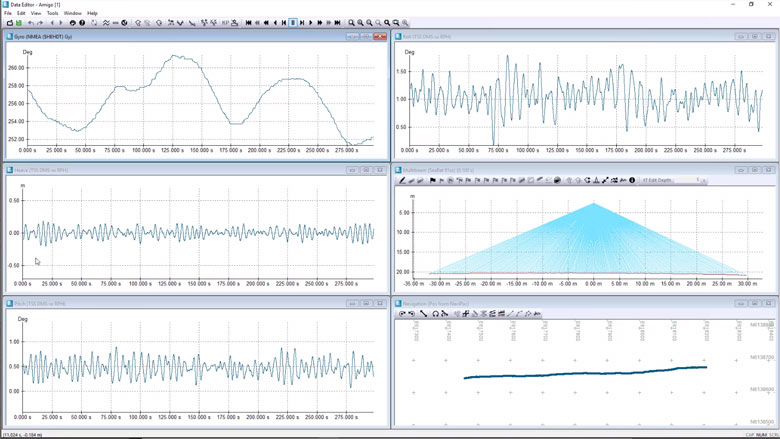
Surface positioning and motion (GPS, Gyro, IMU)
NaviEdit Header Editor allows the user to check the vessel setup.
NaviEdit Data Editor allows the user to view and QC sensor data via a series of graphical displays.
-
References
NaviPac offers advanced and intuitive tools for navigation and surveys, helping customers within survey and constructions industries.
NaviModel references
'This past season I have been using NaviPac 4.5 for surveying and I more than approve of this latest version! NaviPac is truly the best navigation and positioning software on the market. As a surveyor, there are many tools and features I love to use in NaviPac. A quick tip for other NaviPac users, I have saved time on my tasks by configuring shortcuts to quickly access the tools I use most.'
Jeogan NascimentoFreelance online surveyor and survey engineer -
Optional extra services and special offers
EIVA offers a number of services for our NaviSuite software users.
Optional extra services and special offers
Get the most out of your software
EIVA offers a number of services for our NaviSuite software users. These include:
- Access to our self-service licence administration and purchase portal, My EIVA
- eLearning, virtual and classroom training
- Software maintenance and 24/7 support programme (Comes free of charge for subscription licences – Learn about the different licence types and the maintenance and support programme)
- Custom development
- Mobilisation/installation – on-site or remote assistance
- Dongle replacement programme for lost or broken dongles for permanent licences
Also, we have a number of special offers:
Product comparison
Related products
-
NaviPac Tug
Navigation and positioning software dedicated to tugs during rig moves and similar jobs.
€ 14.00/day€ 642.00/year€ 1,925.00/permanent -
NaviPac Pro
The most elaborate NaviPac variant for navigation information and positioning calculations.
€ 115.00/day€ 7,100.00/year€ 21,300.00/permanent -
NaviPac Single User
Navigation and positioning software offering all the features of NaviPac Pro, limited to a single network/remote client and a single subsea object.
€ 55.00/day€ 3,417.00/year€ 10,250.00/permanent