To use this site, please enable javascript
To use this site, please enable javascript
Did you know that you can tow sensors at a fixed height from the seabed automatically with the ScanFish ROTV (remotely operated towed vehicle)? This intelligent, active towed system is ideal for collecting data with sensors that require a stable platform – such as magnetometers, sidescan sonars, multi-beam echo sounders and more.
The ScanFish ROTV just got extra stable… We have released a new automated steering mode that uses your vessel’s echo sounder data as an early warning system to avoid obstacles. This flight mode is made available in NaviPac 4.6, a recent update to EIVA’s navigation and positioning software solution – meaning it is integrated into NaviSuite Kuda Pro, EIVA’s advanced hydrographic survey software, as well as NaviPac (Pro and Single User).
Video showing the ScanFish Vessel-Aided Terrain Follow mode in action, making the ScanFish avoid steep obstacles on the seabed more smoothly than it would have if it were using only the ScanFish altimeter sensor for obstacle avoidance – thereby achieving stability for optimal sensor performance
In the ScanFish’s new Vessel-Aided Terrain Follow mode, your multi-beam echo sounder data is used to detect the seabed and adjust your ScanFish ROTV’s path accordingly if needed. The mode can work both with real-time collected data or with a pre-surveyed digital terrain model (DTM).
The main advantages of using the ScanFish’s Vessel-Aided Terrain Follow mode are…
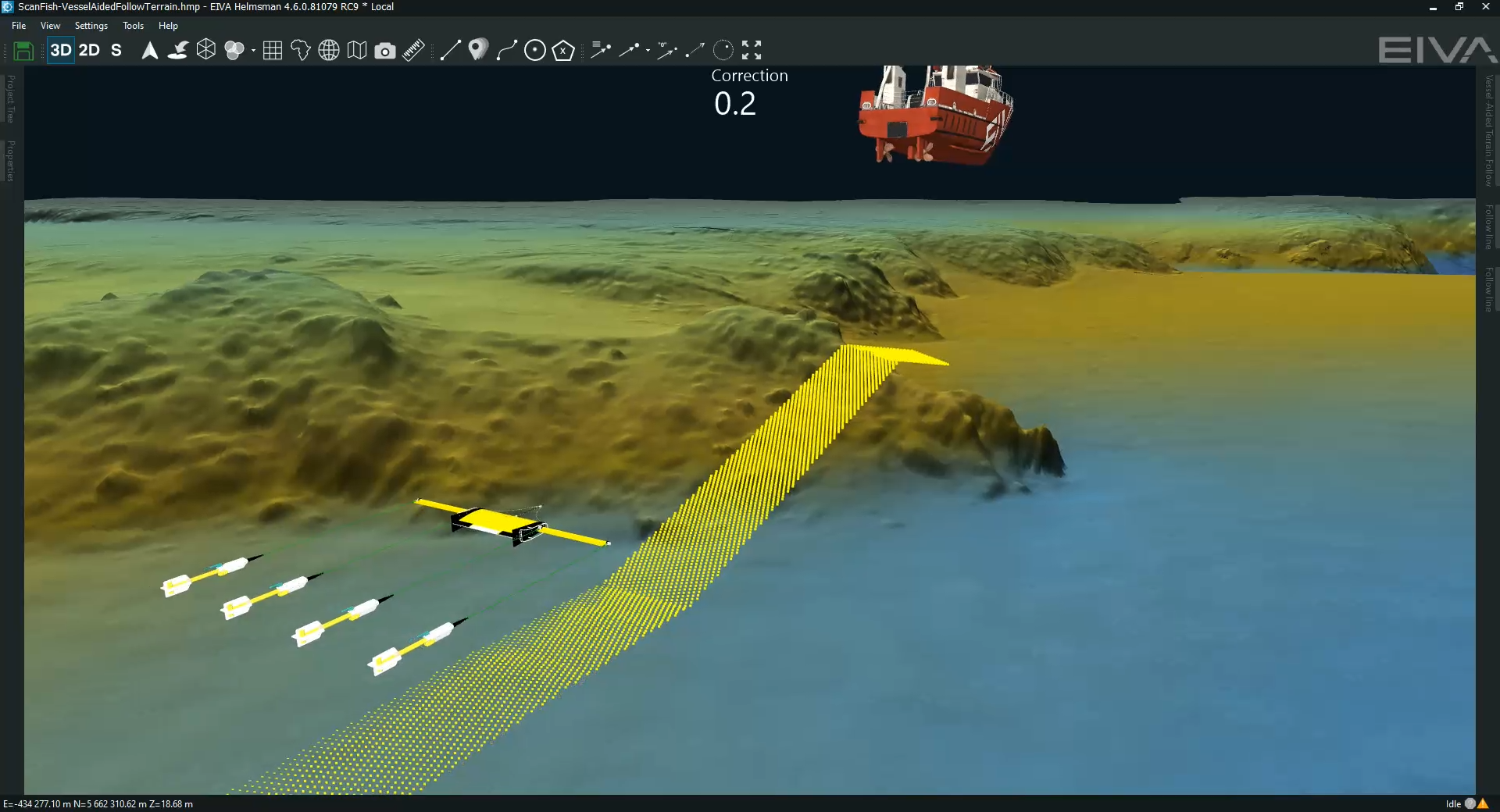
Vessel-Aided Terrain Follow mode in NaviPac showing the correction to the ScanFish ROTV’s vertical runline when encountering a sudden increase in height of the seabed in the DTM – these corrections are input to the ScanFish Flight software as synthetic altimeter values which define its vertical navigation
In the example illustrated above, the vessel towing the ScanFish has surveyed a line and NaviSuite has generated a DTM, revealing there to be a sharp increase in the height of the seabed. The Vessel-Aided Terrain Follow mode then calculates the ideal vertical correction to the ScanFish’s route (shown with yellow lines here) based on the desired slope. In the form of synthetic altimeter values, the vertical correction is put into action by the ScanFish Flight software.
In addition to your vessel and any model of ScanFish ROTV, this steering mode uses the following components…
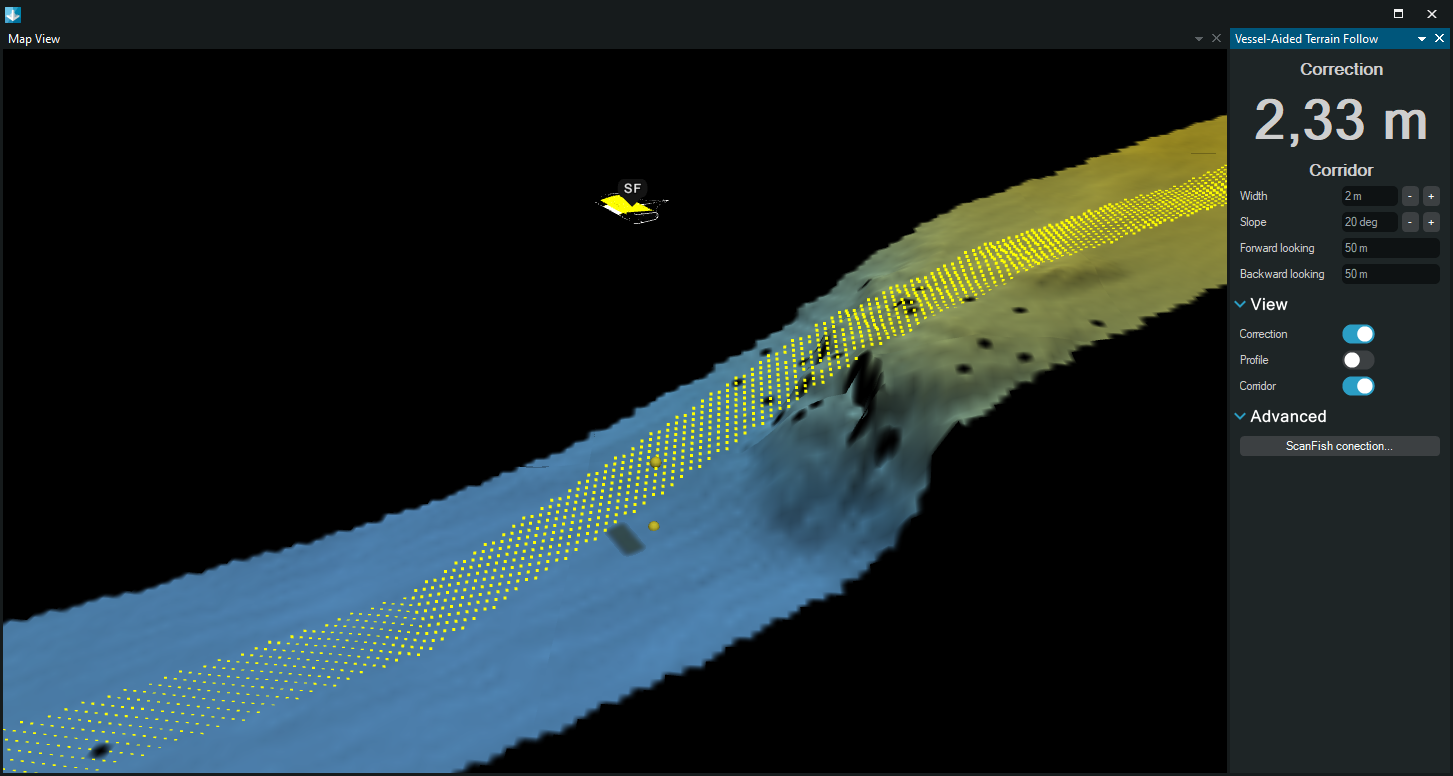
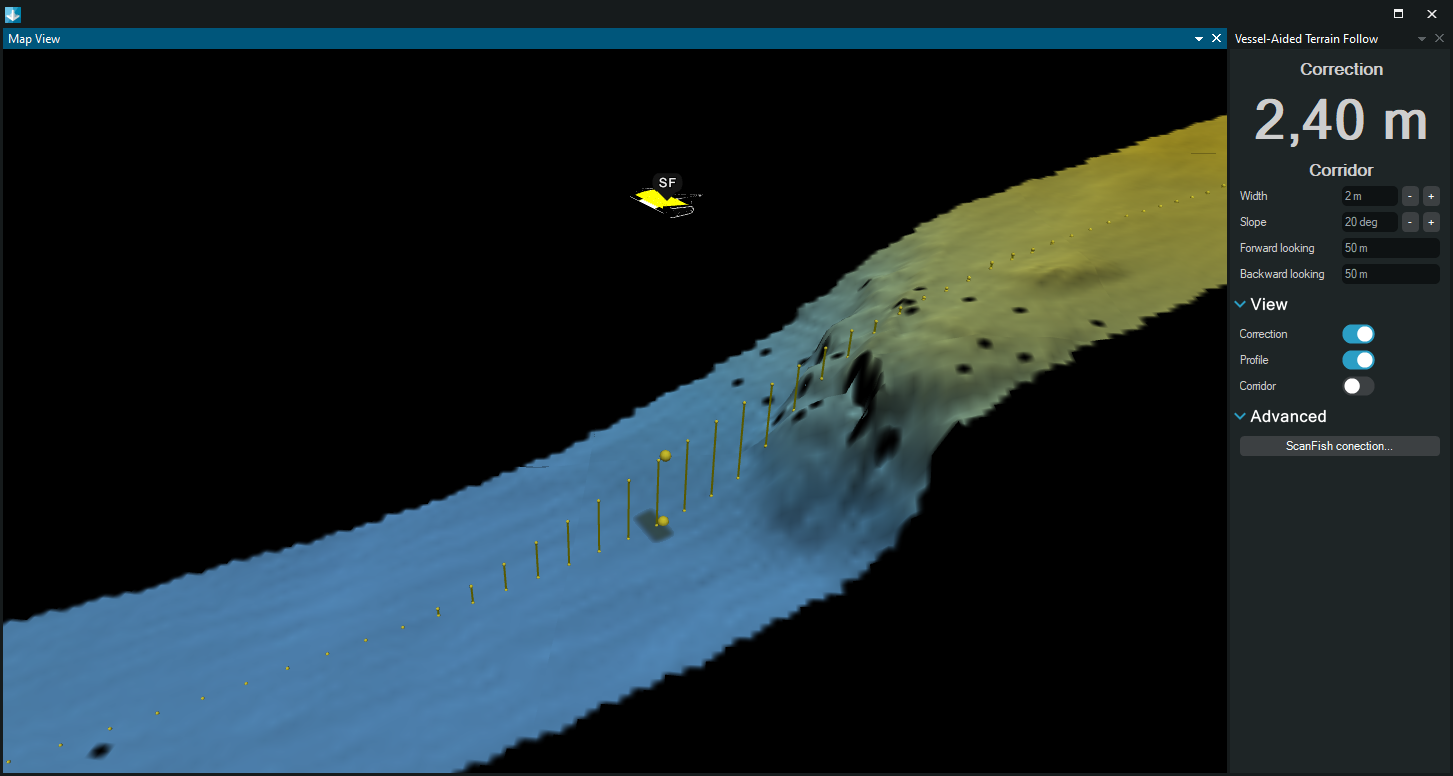
The area highlighted in yellow is the corridor in which objects are considered relevant obstacles to be avoided using the Vessel-Aided Terrain Follow mode – and the two yellow spheres below the ScanFish model show the correction to the vertical route
When NaviSuite calculates the ideal vertical route for your ROTV to optimise obstacle avoidance, it does so according to Vessel-Aided Terrain Follow mode settings which you can adjust – to ensure that your ROTV is not only avoiding obstacles but doing so based on your individual setup’s needs, thus ensuring smoother data.
If a ScanFish is not using the Vessel-Aided Terrain Follow mode (instead avoiding obstacles using an altimeter alone), users can define the height over the seabed, but not the slope or corridor width. This means that if an obstacle is very steep, the ScanFish avoids that obstacle by moving suddenly and steeply, since it avoids objects at a fixed distance close to the ScanFish.
Firstly, when you define the desired slope, you define the range of angles with which your ScanFish can ascend and descend when avoiding obstacles.
There are several reasons you may want to define a specific slope for avoiding obstacles – varying from project to project. Firstly, it can depend on your ScanFish’s speed through the water and how far from obstacles you want your ScanFish to be. You might also have a sensor on the bottom of the ScanFish, for example a sidescan sonar, in which case you may want to lower the desired slope to make certain that the ScanFish stays vertically far away from any obstacles without having to set the fixed height above the seabed to be extra high to achieve the extra distance from obstacles.
In addition, you can define the desired corridor width. The ‘corridor’ refers to the width around your ScanFish ROTV in which obstacles are avoided, as the highest measured point in the corridor is used by NaviSuite to calculate the ROTV’s vertical runline. This corridor should for example be wider if you are using the ScanFish Katria ROTV, a ScanFish XL or a ScanFish mounted with a magnetometer frame, as these solutions are wider than a regular ScanFish. If not using Vessel-Aided Terrain Follow mode, the altimeter on the ScanFish registers obstacles ahead of the ScanFish with a beam angle of 6 degrees.

Deploying a ScanFish Katria with magnetometers
On the other hand, with a smaller ROTV solution, the corridor width should ideally be narrower, since it would be inefficient to avoid irrelevant obstacles, for example a boulder that is not close to hitting the smaller equipment.
This new steering mode is doubly designed to avoid any harm to your ScanFish. The EIVA team has equipped it with a failsafe function for the unlikely case of a malfunction in the setup causing your ScanFish to receive erroneous data from the synthetic altimeter calculated by NaviPac. An error in the synthetic altimeter can occur for example if you are using a pre-surveyed DTM which is outdated, as a new obstacle has appeared since then. In such a case, the priority will always be given to the minimum height registered by the ROTV altimeter mounted on your ScanFish.
This automated steering mode is available for all ScanFish systems.
If you already have a NaviSuite Kuda Pro, NaviPac Pro or NaviPac Single User licence, simply make sure you are running NaviPac 4.6 or later, and you can use this steering mode! To integrate your ScanFish with NaviSuite and unlock this steering mode, you can simply follow the guide on this.
If you don’t yet have NaviSuite, you can always upgrade your setup with a NaviSuite Kuda Pro or NaviPac licence – since the ScanFish Vessel-Aided Terrain Follow mode is included in NaviPac as of version 4.6. NaviPac is EIVA’s software solution dedicated to navigation of vehicles, while NaviSuite Kuda is a bundle of streamlined solutions for hydrographic surveys – from survey planning to data processing and delivery.
The EIVA team is currently developing a towed UXO sensor platform far smaller than the ScanFish – which will be possible to tow behind small USVs.
Stay tuned for news about this upcoming addition to our product pool and more by following EIVA on your preferred social media platform or signing up for our newsletter.