To use this site, please enable javascript
To use this site, please enable javascript
The technological development of the maritime industry is moving faster than ever. Staying ahead and thus ensuring maximum gain of the possibilities it brings, from the beginning, is vital to every organisation involved in operations at sea.
EIVA sees five decisive trends resulting from new and improved technologies. In this and four additional blog items, our CEO, Jeppe Nielsen, dives into each of these trends in detail.
Author: EIVA CEO Jeppe Nielsen
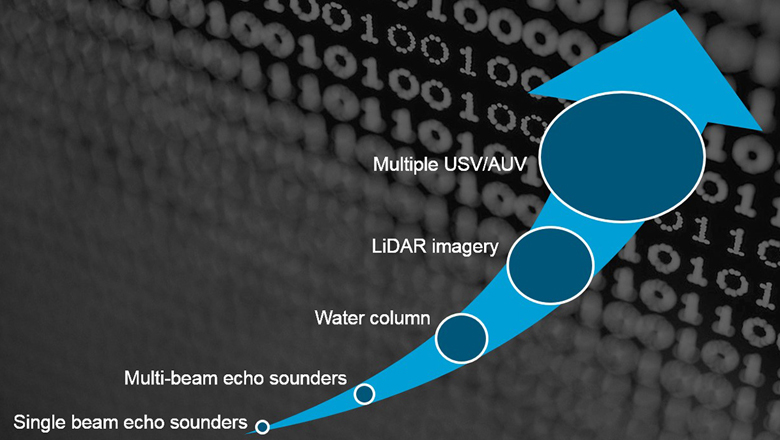
A previous post on the trend of large data sets touched upon how the use of not just one but multiple autonomous/unmanned systems have recently escalated among offshore and shallow water survey specialists. These include AUVs (autonomous underwater vehicles), ASVs (autonomous surface vehicles) and USVs (unmanned surface vehicles).
(Unmanned in this usage means that the vehicle is remote-controlled manually, or automatically follows pre-planned mission routes. Autonomous refers to systems that offer intelligent behaviour – for example, in terms of automatic route planning based on both area to cover and coverage of acquired sensor data, automatic re-survey to cover data gaps, avoidance of obstacles, target identification, or even automated recognition and manipulation of structures.)
These autonomous/unmanned setups multiply the amount of data made available during a single operation, and so also bring a need to adjust existing survey processes accordingly in order to gain maximum benefit from the possibilities introduced – especially in terms of optimising the data processing workflow.
Data processing is a key business process for survey companies. It should be – and most often already is – subject to constant further development in order to increase the quality of deliverables while reducing costs, just like any other business-critical process.
Until now, it was the norm to have a data processing team that worked 1:1 with the data acquisition team. That is, it would take 15 minutes to process 15 minutes of data acquired, including eventing and quality control. However, with more data in play being collected and brought in by not one but often several systems during an operation, the processing workflow must be rethought in order to keep up with the acquisition. As an example, we have one customer who aims at operating six AUVs with a data processing crew the same size as one used for a single AUV.
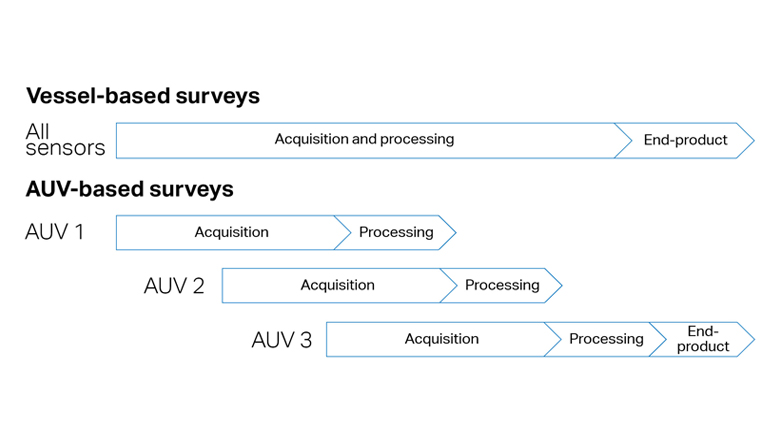
The use of autonomous and unmanned vehicles changes the way we get and process data, including in terms of the frequency with which the data is delivered to the processing team when multiple AUV systems are in play
There are many different approaches to ensuring efficiency of the different types of surveys carried out above and below sea level. Different types of USV/ASV/AUV setups are therefore in play when looking to ensure an efficient workflow. We most often see the following three types:
The use of autonomous and unmanned systems changes the data workflow on many levels.
Traditional surveys with vessel- or ROV-mounted sensors have the benefit of high bandwidth connections to the sensors, allowing for data processing to happen on the vessel immediately after acquisition. With autonomous and unmanned systems, this is not always the case, especially not with AUVs, which offer limited bandwidth available from the vehicle to the surface – just enough to provide status, position, and samples of sensor data, but (for now) not enough for streaming of imagery, sonar and laser data. Consequently, processing either has to happen on board the AUV or after it has been recovered.
However, processing carried out on board an AUV has its limitations:
For surface vehicles, high-bandwidth streaming is possible within a radius of 1-5 kilometres using Wi-Fi mesh or 3G/4G, which cover many offshore areas such as the Gulf of Mexico or the North Sea, and satellites, which provide the possibility to receive data worldwide. Depending on the technology chosen, the amount of data that can be streamed varies from just tracking and basic quality control to full multi-beam echo sounder and LiDAR point clouds.
As processing software providers, we need to look into how we can assist our users in getting these large data sets through the software workflow as efficiently and quickly as possible – without having to expand on the size of the team – and how we in general can meet the requirements that come along with the use of AUVs/ASVs/USVs. We believe these questions can best be answered with features that will enable the software to do as much of the processing as possible. This will leave only those tasks that require a human hand to the data processing crew, which will be relatively small compared to the number of sensors in play and the rapid frequency of data delivered.
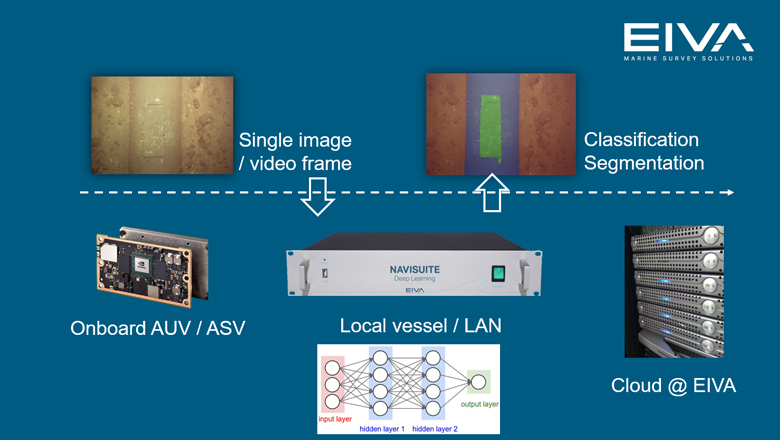
For AUVs/ASVs, EIVA’s further development of NaviSuite features is currently focused on enhancing the intelligent behaviour of the vehicle (ie using high-end, on-board computers such as the NVIDIA Jetson TX1 for image processing, autonomous navigation, and mission re-planning) while also being able to do as much of the raw data processing on board the vehicle.
Moreover, we are in general putting a lot of effort into automating as much of the data processing workflow as possible – regardless if the processing is done on board the vehicle or after recovery of any type of autonomous or unmanned system.
New tools are being implemented for release in 2017, which will drastically change the way we look at data processing. One such tool is a new processing management tool. It enables you to both define your workflow processes, and to monitor the execution. The tool can control features in EIVA processing software products (such as NaviEdit and NaviModel) as well as third-party tools, scripts etc. The tool is designed for massive data and multi-core and -user parallelisation, which means that large survey data sets can be processed much faster than before.
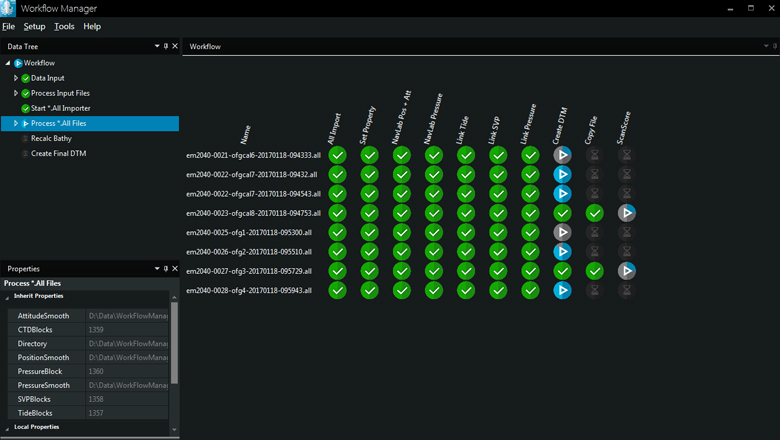
NaviSuite Workflow Manager tool to be released Q2 2017
The tool will provide a number of benefits that will affect your business:
If you are interesting in discussing automation with us, please do not hesitate to reach out to our software experts.