To use this site, please enable javascript
To use this site, please enable javascript
Streamlining ROV operations and customising software configurations to fit your needs… These are the main themes for the many new features in this new update to our complete software solution for ROV operations, NaviSuite Mobula (BlueROV2).
Our development team took this topside ROV software solution into the workshop and turned it upside down. They have addressed as many requests from the market as possible – and have come a long way! Now, NaviSuite Mobula 4.6 (BlueROV2) is ready for action. So get your joysticks ready, because we’re diving in to the details about this new and improved version of NaviSuite Mobula for BlueROV2.
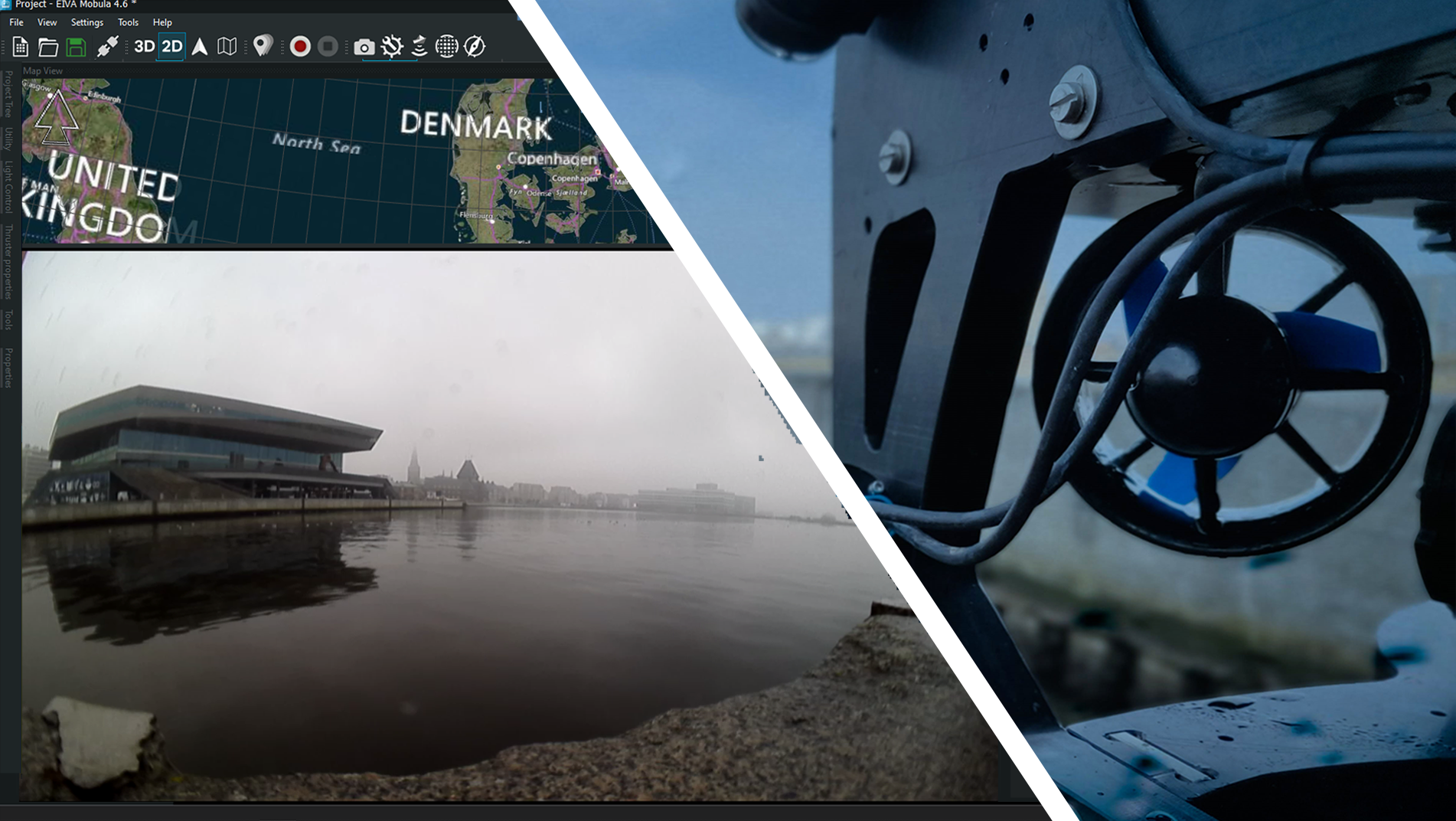
NaviSuite Mobula is a software solution supporting ROV operations every step of the way
Start your operations without any hassle – we have streamlined the NaviSuite Mobula start-up sequence. In version 4.6, the software is ready for an operation as soon as you open it. This is because we have replaced the template selection, which took several steps to set up, with default UI elements that are now always part of a new project when one is created. These UI elements include multiple ‘dockable’ views (windows), background maps, display data in dashboards/widgets/graphs, adding 3D models and more.
We have added a wave of new assisted control modes in this update. These include enhanced assisted steering and new automated flight modes such as station keeping based on velocities.
The new automated control modes include the option to go-to-target by simply placing a waypoint on the map and have the ROV move to it automatically. Note that automated control modes requires navigation sensors – as a minimum a DVL. On that note, another improvement in this update is that NaviSuite Mobula now supports integration with a wide variety of DVLs and sonar models!
Another new automated control mode is station keeping based on velocities. With this new feature, while ensuring station keeping, it is possible to surge, sway, and heave with the ROV. After the movement is stopped, the station keeping position is updated accordingly.
The user interface is constantly worked on to provide our users with an optimal overview and easier control of the software during ROV dives. For the Mobula 4.6 release, we have made changes including a new window layout, new windows, new buttons, as well as new toggles.
Another new element in the user interface is overlay widgets, which make it easy to keep track of real-time data during your operation. The wide variety of overlay widgets can display any real-time data available, such as videos, images, graphics, time, heading, pitch and roll.
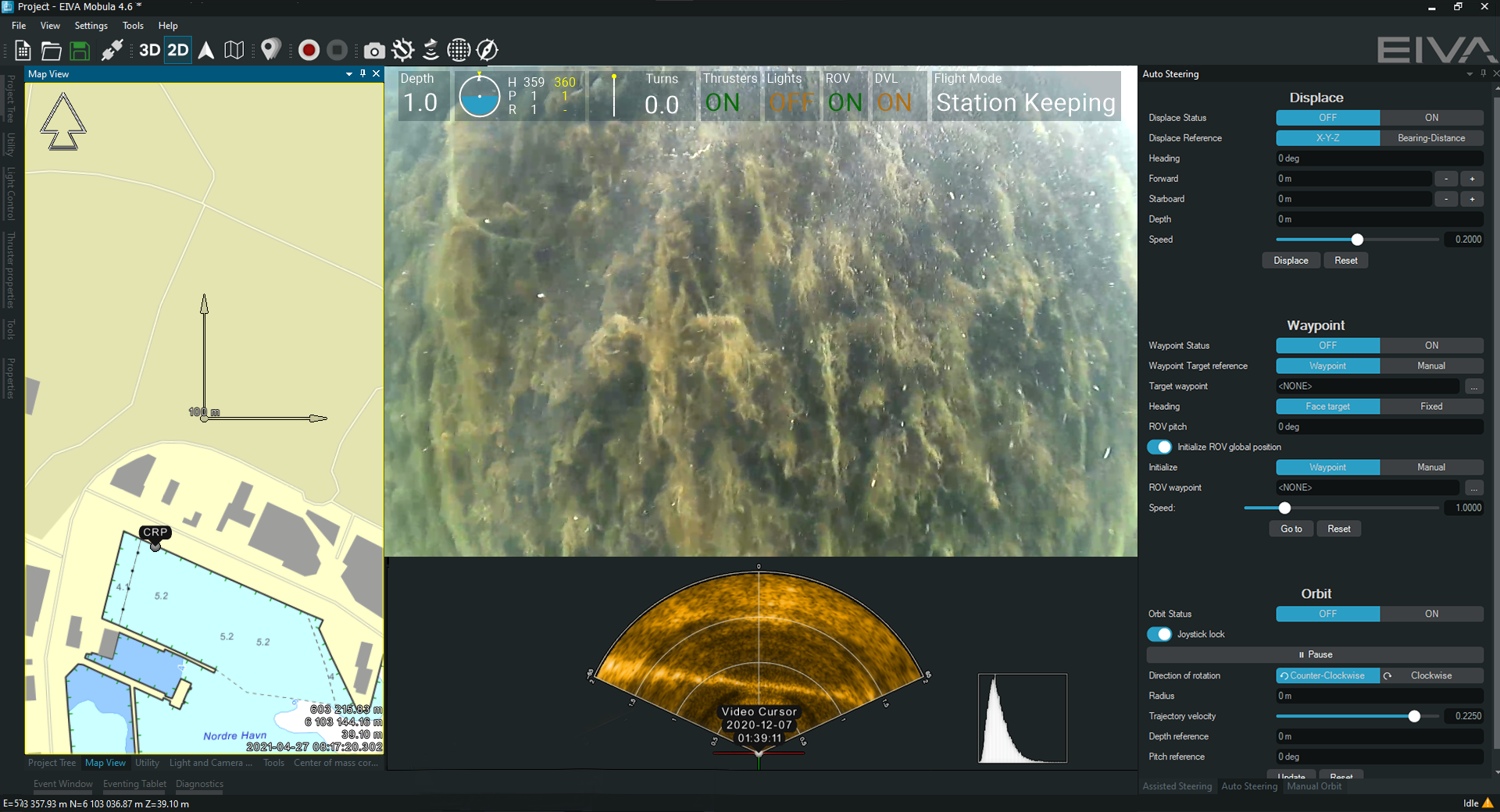
An example of the user interface of NaviSuite Mobula – featuring a video overlay with widgets providing live information, a map view and sonar data display
In this update, we have improved the options for configuring your joystick and thruster setup.
This means that you can now assign keys to your joystick however you like. We have also doubled the amount of possible controls by adding the option to use shift together with another key, producing a new action.
The advanced thruster configuration options mean that NaviSuite Mobula can be configured for your specific thruster frame, no matter what custom BlueROV2 design, you may have. This is possible because you can now adjust thruster allocation and spinning direction to reflect the custom ROV design layout.
We hope that this has gotten you excited for the many new features in NaviSuite Mobula (BlueROV2). If you aren’t already operating NaviSuite Mobula on your BlueROV2, you can always request a free trial and experience the control this software solution gives you during dives first hand.
Follow the EIVA cruise to stay up to date on new software updates like this, as well as our free webinars on the latest developments in our software and hardware products. Feel free to reach out to us, for example if you have any questions about this latest update, or suggestions for future updates.