To use this site, please enable javascript
To use this site, please enable javascript
Assets on the seabed, such as offshore wind turbines, natural resource extraction systems and tens of thousands of kilometers of underwater cables, serve as critical subsea infrastructure. To efficiently build, monitor, protect and maintain these assets, autonomous system solutions are vital. Over-the-horizon unmanned deployments with infrequent servicing can be achieved by vehicles, sensors and software working together to enable high-resolution data collection – as this data can then be used as real-time inputs for intelligent autonomous navigation, in hardware setups with low energy consumption.
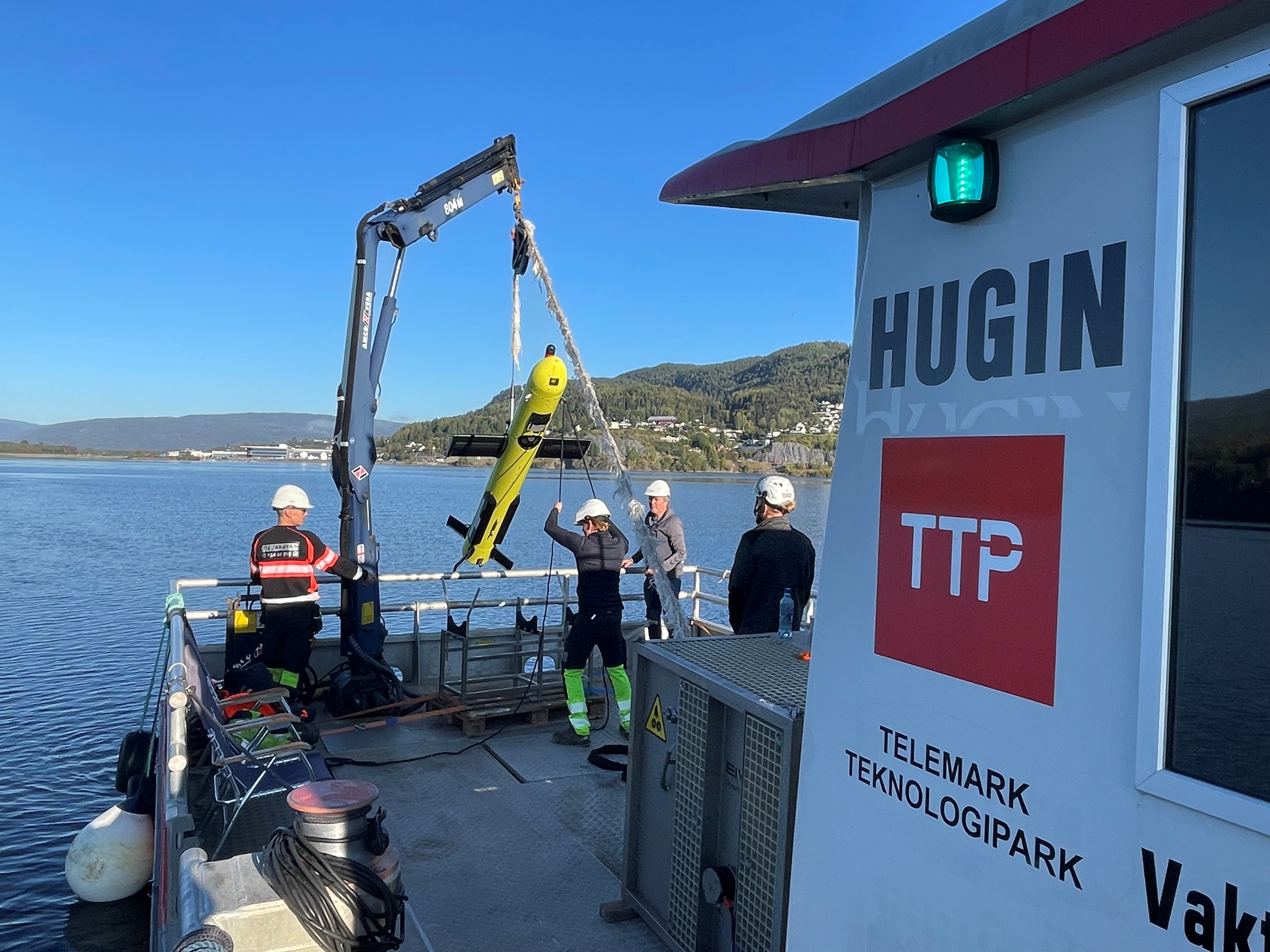
EIVA has launched a new active towed sensor platform, ViperFish, which serves as a building block for autonomous systems, as it is towable by unmanned surface vehicles (USV). USVs have breached the market waters, deployed for unmanned operations, especially requiring small, fuel-efficient vessels – and they are being developed as platforms for autonomous operations. A limitation is that USVs operate from the water’s surface, which will vary in distance from the seabed rather than maintaining the ideal distance for the sensor collecting data. This sensor sweet spot is important for operations with sensors such as sidescan sonars (SSS) for target detection and classification and magnetometers for locating buried targets such as UXOs, as well as for tracking buried cables in operations for protection and monitoring of maritime CNI (critical national infrastructures).
For USVs to become useful platforms for target detection in these types of operations, one possible setup is actively towing a sensor platform behind the USV.
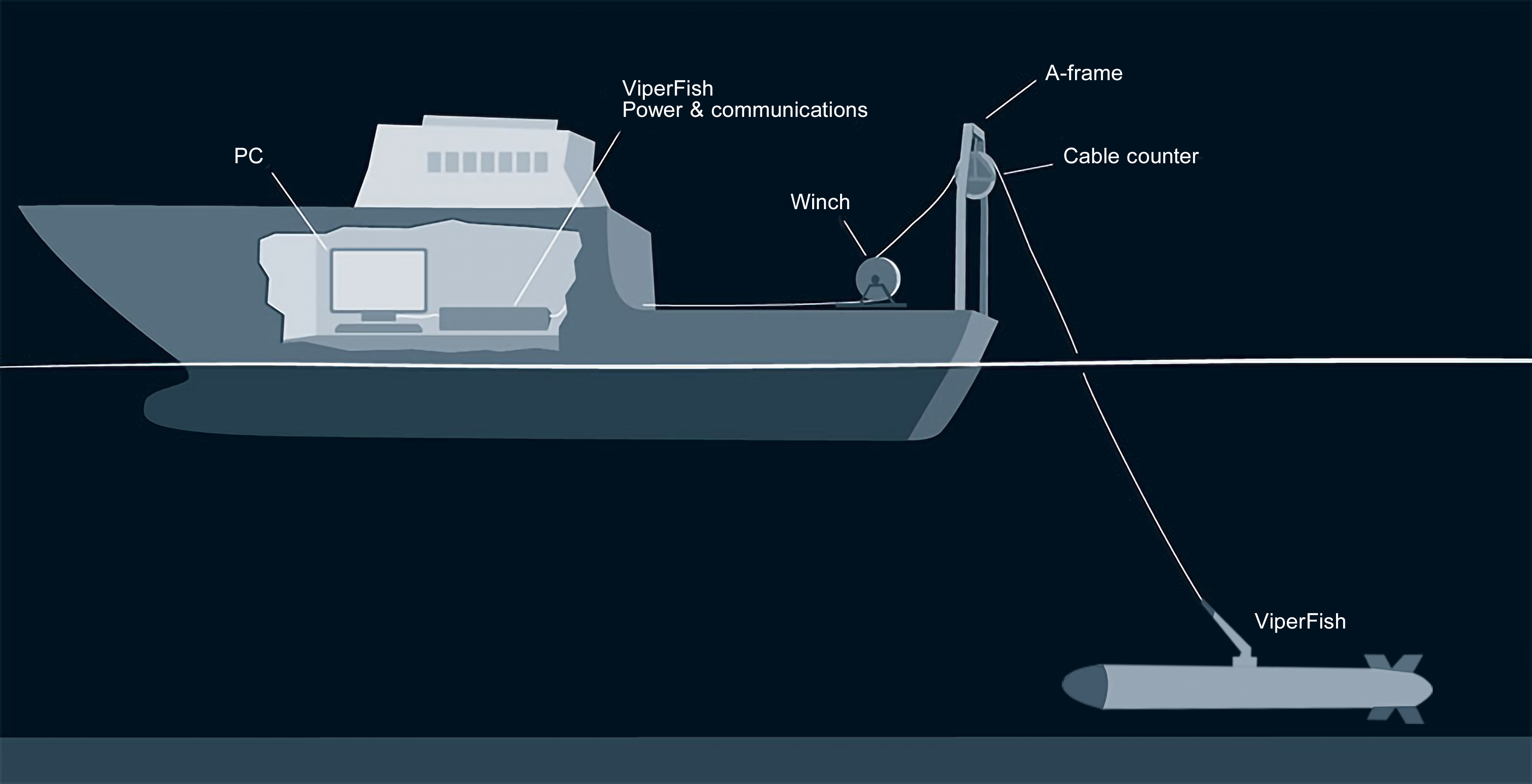
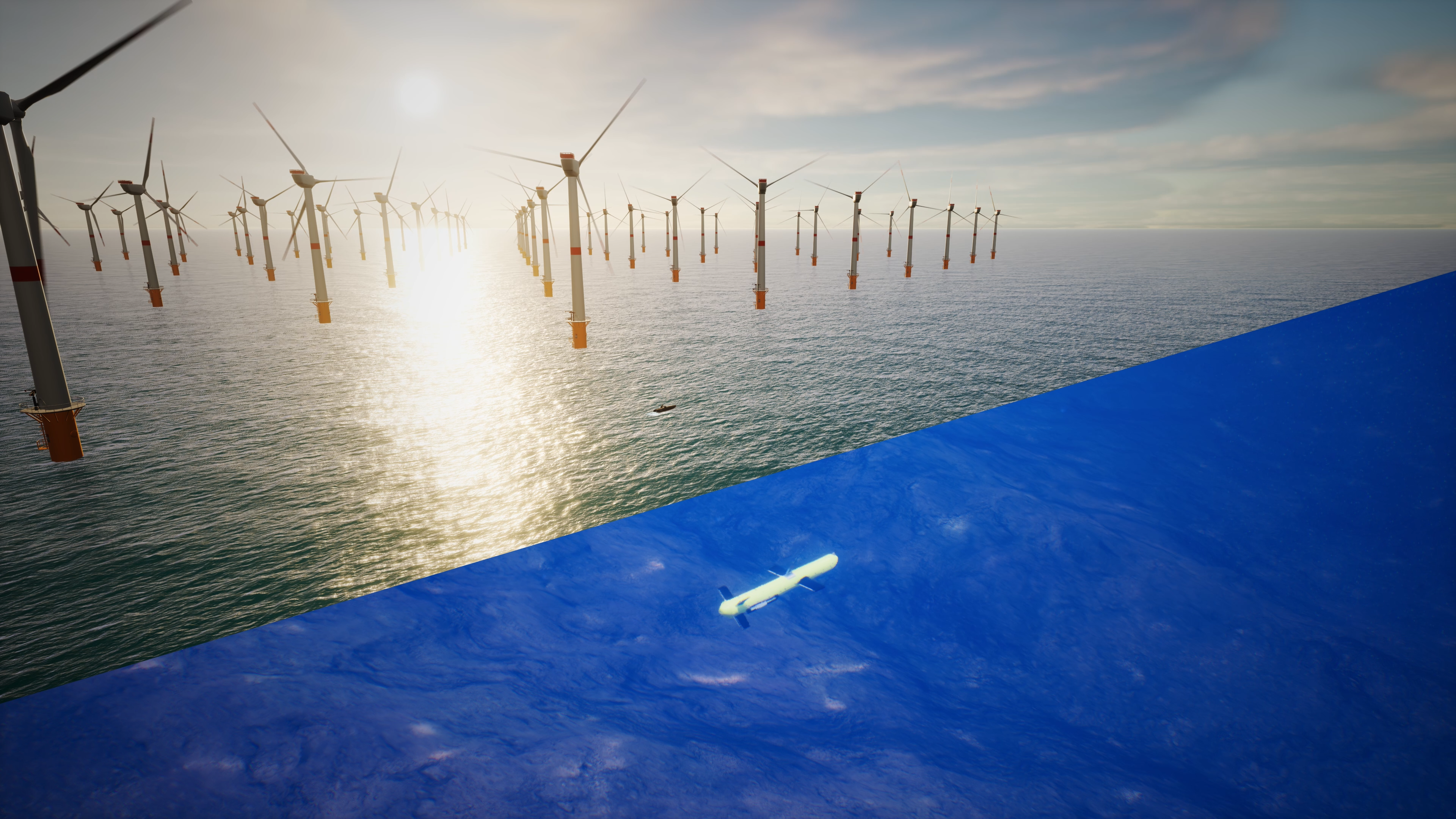
Concept illustration of the ViperFish ROTV
The ViperFish ROTV can expand the capabilities of autonomous USV systems to include accurate and reliable detection and classification of targets such as MILCOs or damages on critical subsea infrastructure. Its design is optimised for autonomous systems through low energy consumption, high-quality data collection and integration between hardware and software – for example with automated steering modes. We dive into the details of the ROTV’s design below.
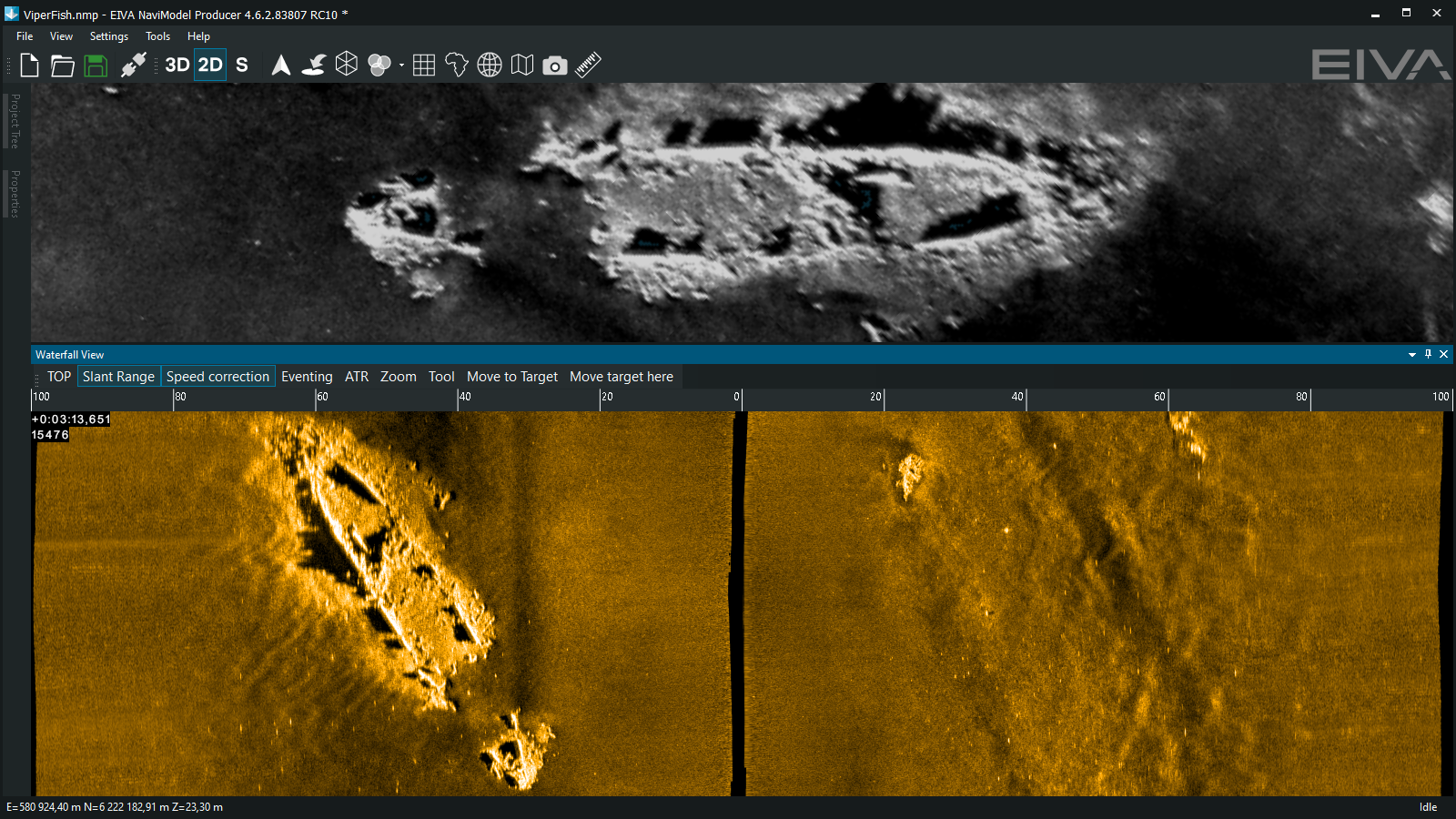
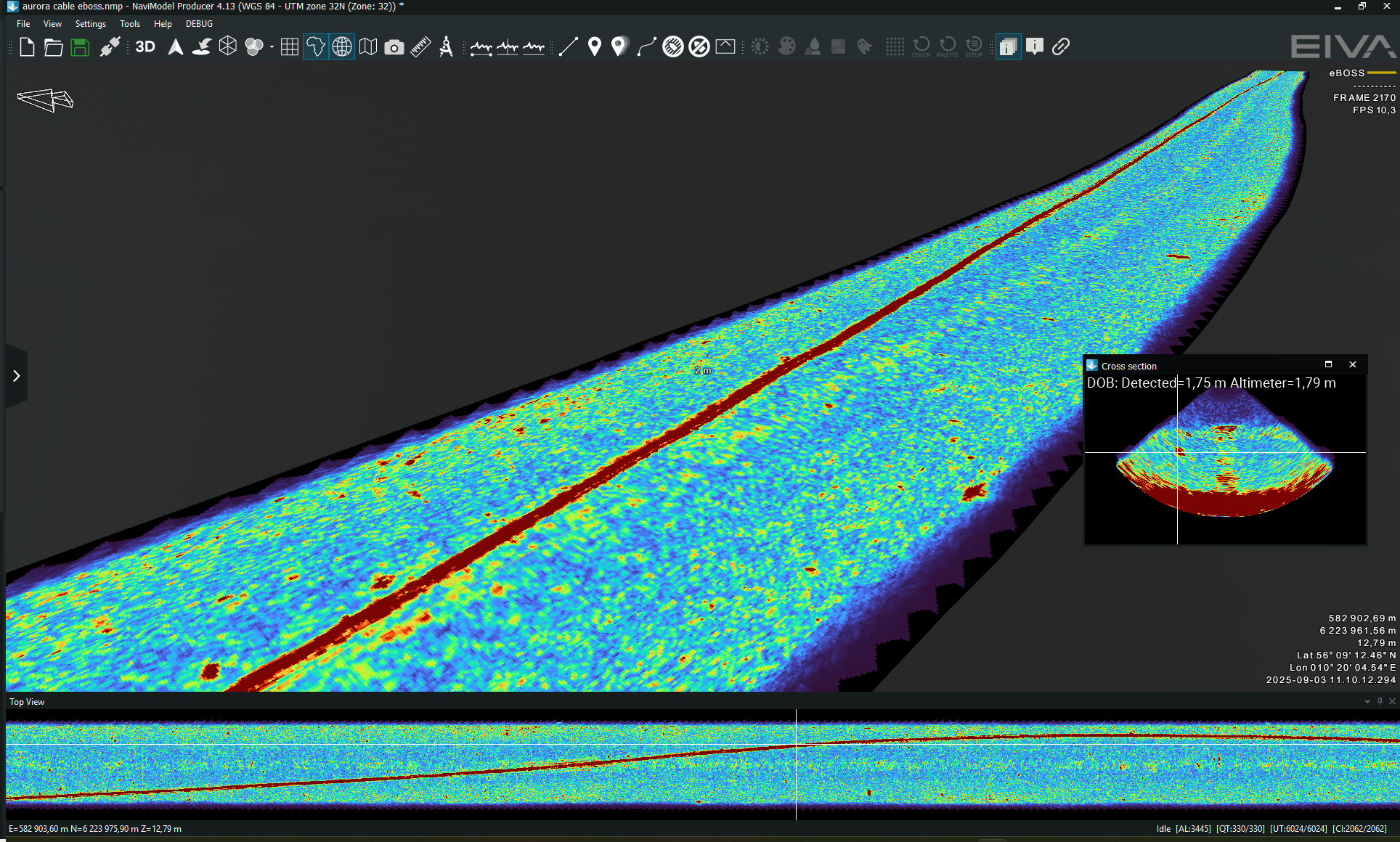
High-resolution multi-aperture sidescan sonar data of a shipwreck – collected with ViperFish sensor platform and visualised in NaviSuite software
To ensure optimal data collection, ViperFish must position sensors precisely. This is achieved with 3D control and automation electronics and software technology originally developed by EIVA for the ScanFish ROTV, the industry leading UXO survey sensor platform. These components therefore have thousands of hours documented success in the field.
Using the Follow Seabed automated flight mode, EIVA’s ROTVs follow the seabed terrain at a fixed distance, for example maintaining 3 m height. To further optimise this, the ROTV flight control software can be upgraded with EIVA’s software toolbox, NaviSuite. This integration enables operators of the ROTV to use MBES data (real-time from vessel or pre-survey) for early warning to make the ROTV automatically avoid steep obstacles more smoothly with the flight mode Vessel-Aided Terrain Follow. This ensures stable data collection and safe ROTV operations even in areas with steep obstacles.
The ViperFish can be steered both vertically and horizontally, meaning you can input runlines to the ViperFish ROTV’s Flight software, and it will follow them exactly. This capability to maintain a horizontal position ensures optimal area coverage by minimising risk of gaps in data.
In addition to positioning the location of the sensors precisely, ViperFish keeps pitch consistent by staying horizontal even while following the seabed’s uneven terrain. This is achieved through active flaps minimising pitch changes caused by vertical steering. The design also minimises turbulence through laminar flow, resulting in smooth, stable movement. ViperFish experiences low drag and minimal turbulence thanks to the system design, resulting in a low energy cost of operations.
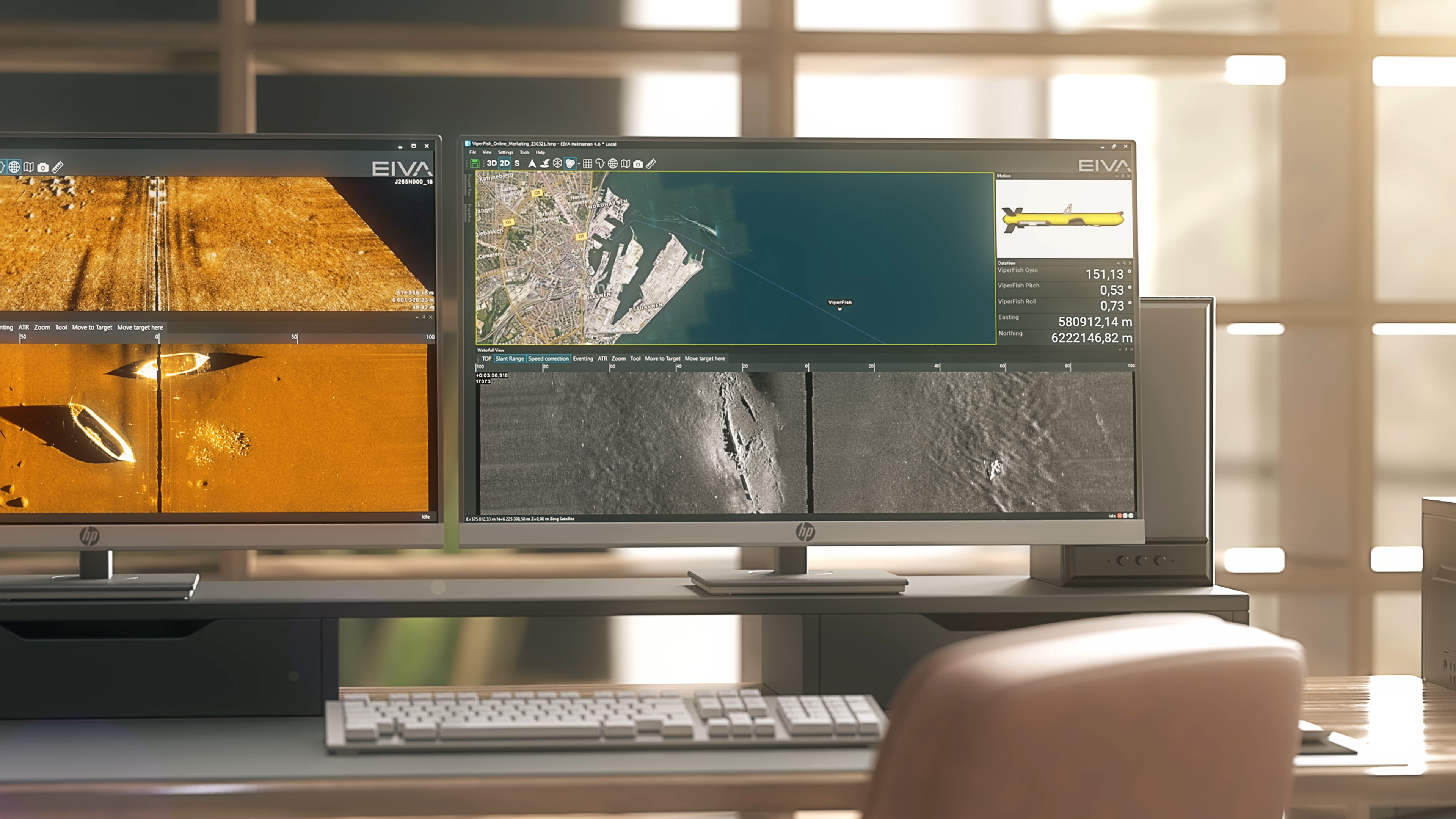
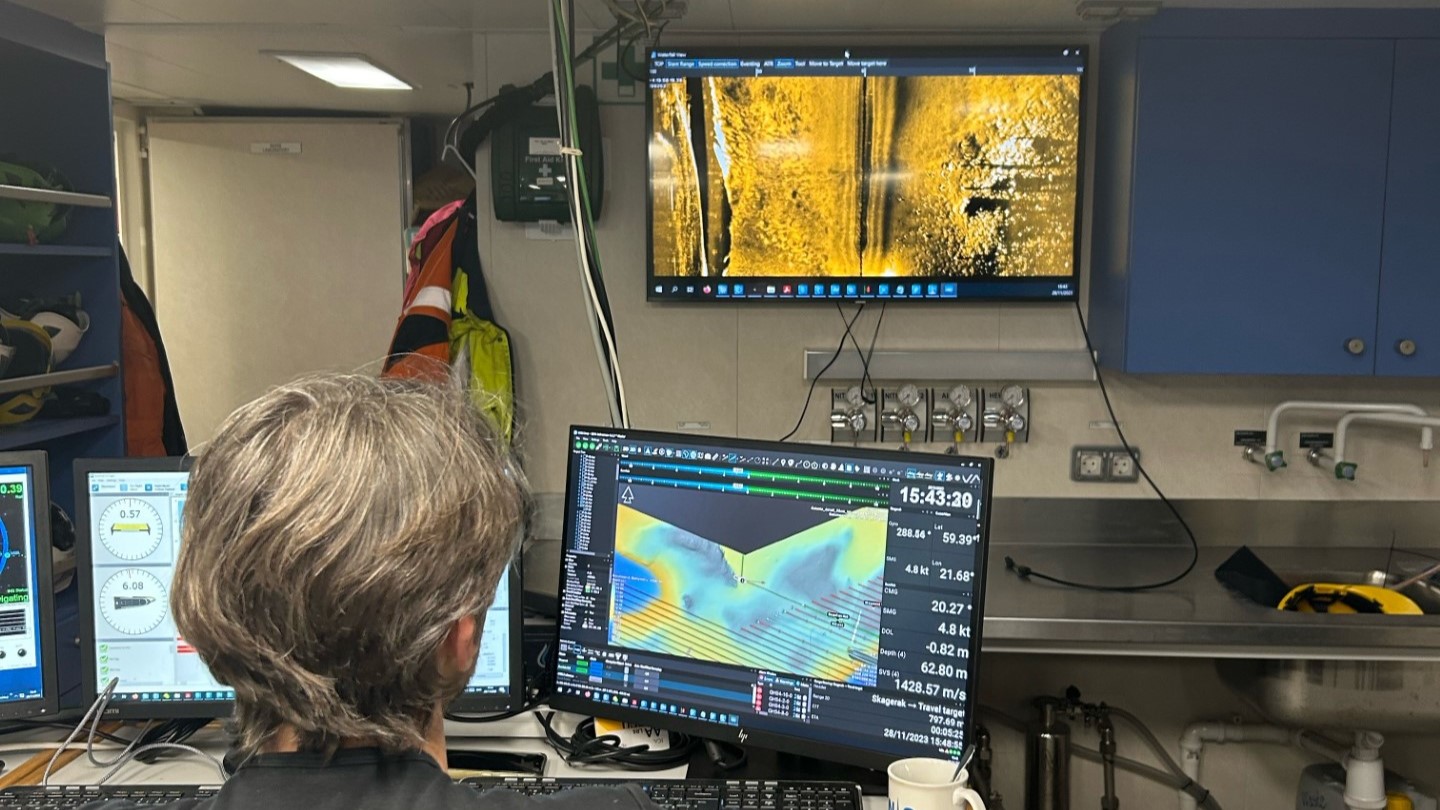
Dive into some of the survey planning and real-time data processing tools available in NaviSuite
In addition to tools for vessel-aided obstacle avoidance and mission planning, NaviSuite software provides sensor data fusion display with seamless integration of data from multiple sensors; real-time data cleaning; automatic target recognition and logging; as well as the possibility of developing custom software tools.
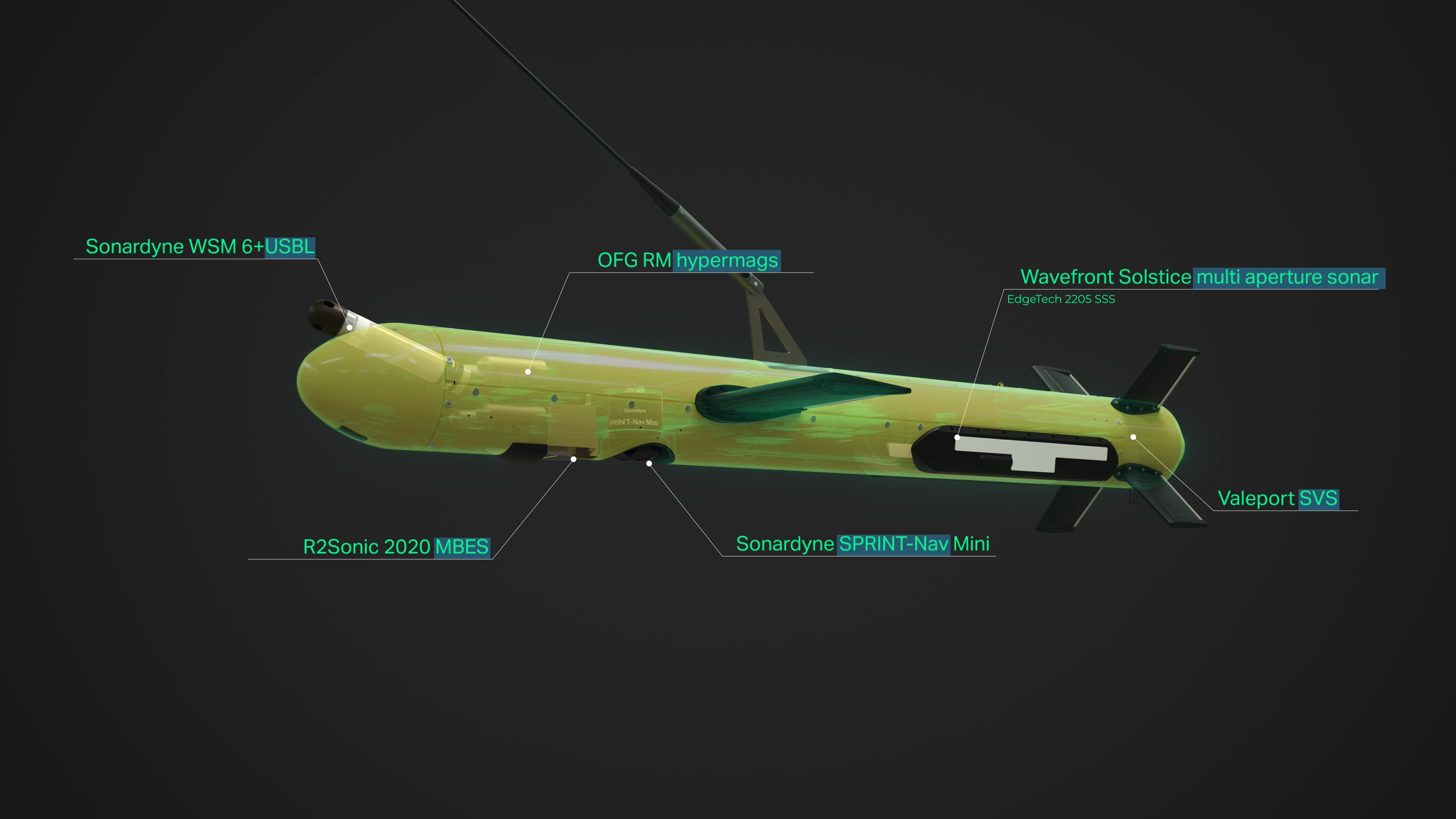
Illustration of the payload available onboard the ViperFish
ViperFish’s state-of-the-art sensor payload provides a holistic understanding of underwater environments, enabling comprehensive data acquisition in various operational scenarios. Users can choose from a list of integrated imaging and positioning sensors based on their specific requirements: Objects and structures on the seabed can be imaged using Solstice multi-aperture sidescan sonar and R2Sonic MBES, while OFG magnetometers aid in locating buried UXOs, MILCOs, cables and more.
In summary, ViperFish is an all-in-one solution providing seamless automation of subsea tasks to help build, monitor, protect and maintain critical subsea infrastructure.
Note: This article was originally written for and published in The Journal of Ocean Technology.