Why autonomy matters for ROV inspections
Automate inspection tasks – while keeping pilots fully in control
Most subsea ROV near-asset inspections involve repeatable movement: holding distance, keeping a stable heading, following a line, or moving at constant speed.
These are all tasks that autonomy can automate.
The benefits of automating inspection tasks
- Short ROI across multi‑year campaigns
- Reduced pilot workload
- Higher and consistent data quality
- Faster, repeatable inspections with standardised workflows through reduced planning, acquisition and processing time
- Less training required across different vehicles thanks to a common software workflow
- Safer working environments through the ability to control operations remotely
- Enables long‑duration operations with smaller, greener offshore footprints
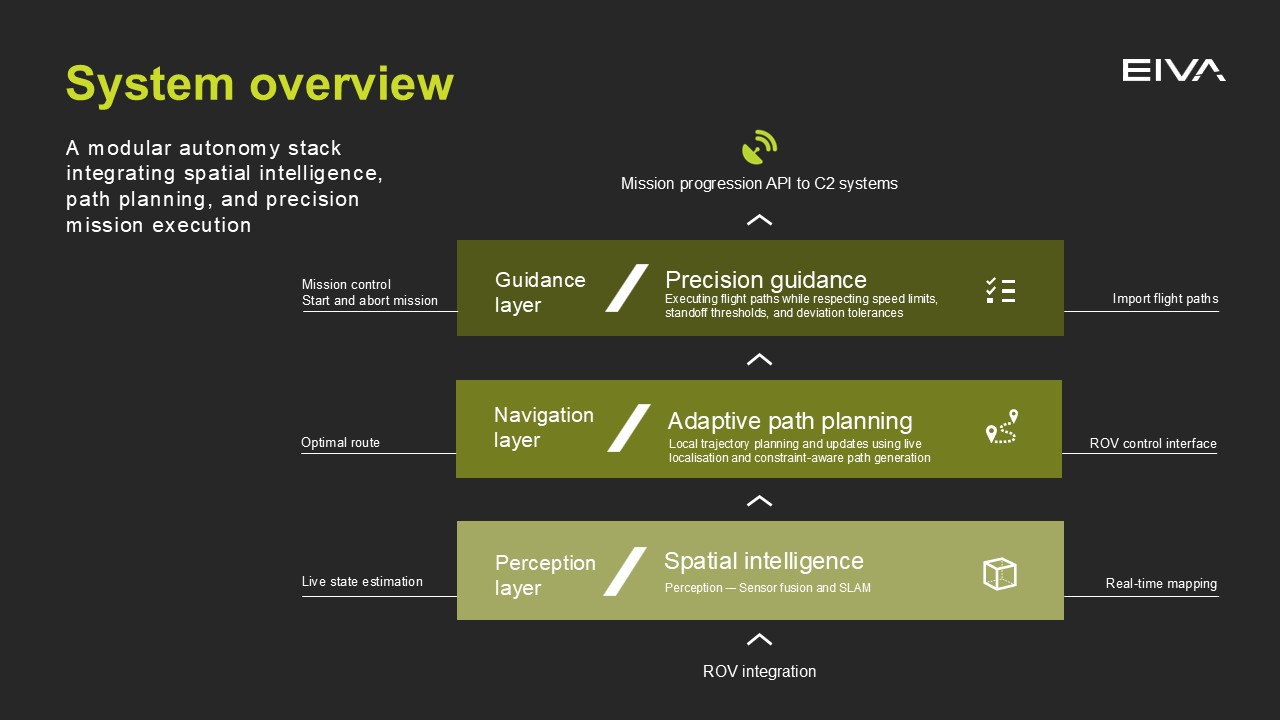
NaviSuite ROV Autonomy is a supervised autonomy software package that supports inspection, maintenance and repair operations. It translates inspection requirements into ROV guidance-level commands, so the vehicle can handle repeatable motion while the pilot remains in control with instant override.
'The most basic inspection scopes become less dependent on ROV and Inspection personnel experience. More accurate time estimates for execution and reporting' – DeepOcean AS
NaviSuite ROV Autonomy is available as a licence; integration services also available to enable your vehicle and set‑up.
What NaviSuite ROV Autonomy offers
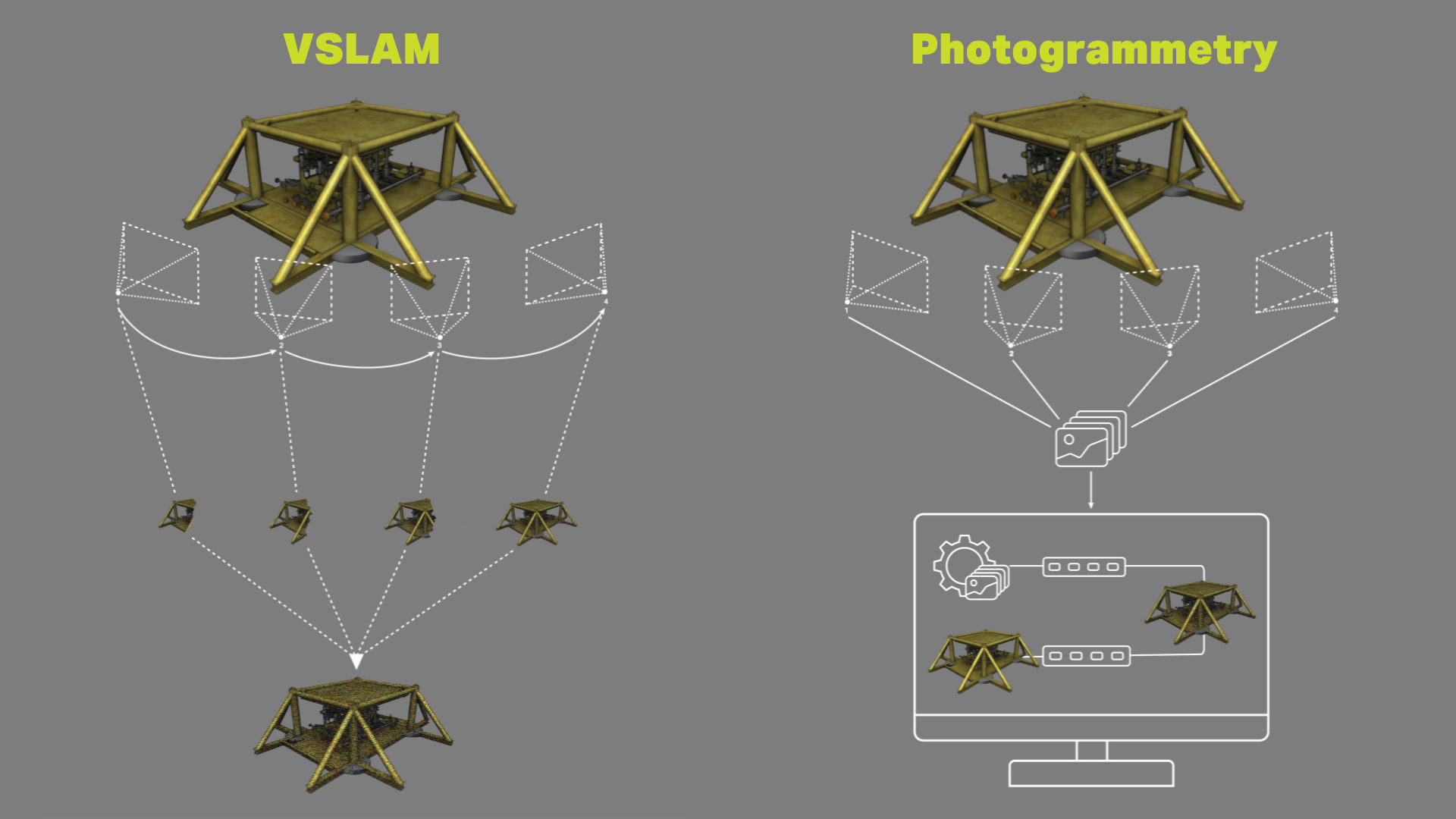
Powered by perception via sensor fusion
Combines available onboard sensor inputs to build a reliable situational picture for guidance decisions.
Sensor‑ and vehicle‑agnostic
Designed to integrate with a wide range of ROVs and sensors, supporting mixed fleets and upgrades over time.
Near‑asset inspection
Enables consistent, safe operations close to structures through automated stand‑off behaviour and perception‑driven protection.
Guidance‑level assistance
Provides high‑level motion guidance to support the pilot, while keeping full vehicle authority and decision‑making in the hands of the operator.
How autonomous guidance enhances your ROV operations
Adaptive path following
Follow planned paths while respecting constraints and the live surroundings
Distance keeping / stand‑off control
Maintain asset‑specific stand‑off distances for consistent and controlled near‑structure operations.
Velocity control
Hold a consistent speed suited to the inspection task and operating conditions.
Why choose EIVA’s supervised autonomy software package?
Inspection process automation
Decades of subsea software perception, navigation and guidance expertise used to translate operational requirements into reliable, high‑quality inspection execution.
Near‑asset safety by design
Uses autonomy to keep the ROV in stable, controlled positions around structures, reducing the likelihood of unintended contact while keeping the pilot in command.
Lower operational risk and workload
Consistent behaviour reduces unintended contact and decreases pilot fatigue.
More consistent inspection data quality
Predictable, stable motion produces uniform datasets across teams and campaigns.
Shorter training time and predictable planning
Intuitive workflows and repeatable execution make onboarding easier and help teams plan inspection time more accurately
How it works
Supervised autonomy (LoA3)
LoA3 (level 3 autonomy) means the system automates repeatable guidance tasks – such as holding stand‑off or following a path – while the pilot continuously supervises the operation and can intervene or take over instantly at any moment.
Architecture
Built on the NaviSuite architecture, using its well‑proven foundations in data modelling, sensor fusion, geodesy and geometry to deliver reliable guidance for autonomous inspection tasks.
Perception for navigation and guidance
Sensor fusion builds a detailed situational picture of the surroundings. Based on this, the autonomy system can guide the vehicle through high-level actions such as go-to-point, velocity control, stand‑off, path-following and path-adjustment.
Integration
NaviSuite ROV Autonomy is licence-based and can be installed on a topside computer and/or onboard the ROV. An integration project is required depending on ROV and sensors and overall system set-up.
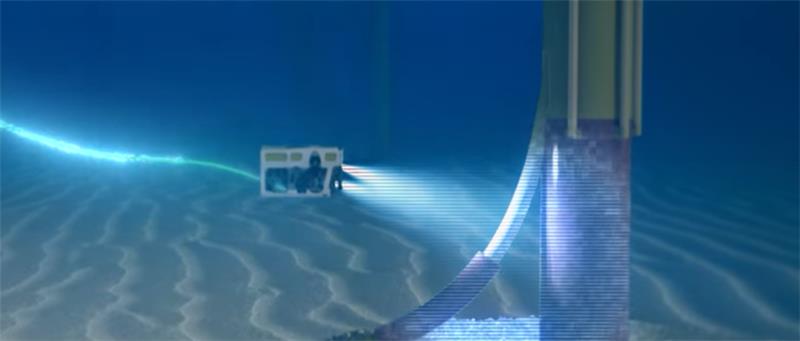
Manual vs autonomous piloting
– what changes and why it matters
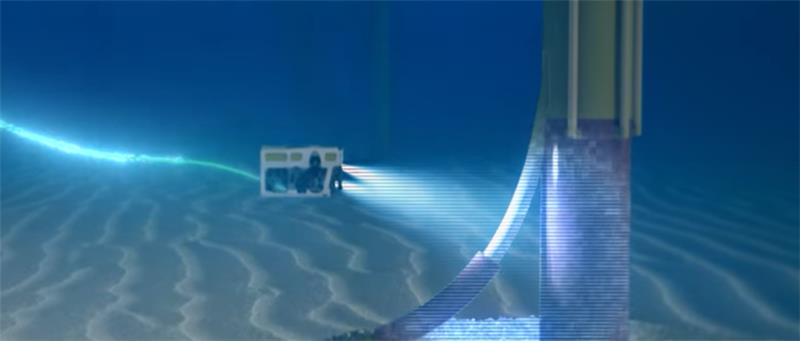
Consistent stand‑off near the structure
The yellow ROV shows how the manual track varies as the pilot adjusts in real time. Whereas the ghost ROV shows how autonomy keeps a stable distance from the hull.
Outcome: safer near‑asset operation with fewer unintentional movements.

Repeatable track for higher‑quality data
Manual piloting naturally introduces drift and micro‑corrections. While autonomous guidance follows a cleaner, more consistent line.
Outcome: uniform coverage and reliable inspection records.

Request integration assessment
This is the first release towards higher level of autonomy that will be released later.
See supervised autonomy in practice
Understand how these capabilities translate into real inspection operations. In our upcoming webinar: Why autonomy matters for ROV inspections, we demonstrate how NaviSuite ROV Autonomy is applied offshore – from stand‑off control to repeatable path following – and what changes when moving from manual to guided inspection workflows.